You might also like
- Report of IR Sensor ProjectDocument13 pagesReport of IR Sensor ProjectHammad Umer0% (2)
- Welllift Installation and User Guide For: Pwls0001 - Modbus Unit Pwls0004 - Power Supply UnitDocument62 pagesWelllift Installation and User Guide For: Pwls0001 - Modbus Unit Pwls0004 - Power Supply UnitMahmoud KhattabNo ratings yet
- Obstacle DetectorDocument10 pagesObstacle DetectorEno OndhuNo ratings yet
- Development of Smart Blind StickDocument7 pagesDevelopment of Smart Blind StickxpeprisheyNo ratings yet
- Semester: V Class / Branch: TE ITDocument6 pagesSemester: V Class / Branch: TE ITKaustubh SawantNo ratings yet
- Uri and AbsDocument3 pagesUri and AbsJitesh BanotNo ratings yet
- Obstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialDocument7 pagesObstacle Avoider Using Atmega 8, IR Sensor, Embedded C Programming On AVR TutorialMUDAM ALEKYANo ratings yet
- Contactless Liquid Level ControllerDocument5 pagesContactless Liquid Level ControllerRyan Christian NantesNo ratings yet
- SensorsDocument15 pagesSensorsMuhammad Fasih KhanNo ratings yet
- Automatic Railway Gate ControlDocument22 pagesAutomatic Railway Gate ControlsriramNo ratings yet
- Street Light Automation Using IoTDocument43 pagesStreet Light Automation Using IoTAshwin100% (1)
- Auto Pilot Security System For Railway Gates Using LabviewDocument4 pagesAuto Pilot Security System For Railway Gates Using LabviewPrudhvi BarmaNo ratings yet
- 9 IjecsDocument5 pages9 IjecsRamsathayaNo ratings yet
- Photoelectric SensorDocument10 pagesPhotoelectric SensorNguyễn Trường GiangNo ratings yet
- Mech2502 g10 PosterDocument1 pageMech2502 g10 Posterapi-664408631No ratings yet
- Contact Less Digital Tachometer: Mini Project OnDocument45 pagesContact Less Digital Tachometer: Mini Project OnMayur Chandak0% (1)
- Communication: USART (Universal Synchronous/Asynchronous Receiver/Transmitter)Document10 pagesCommunication: USART (Universal Synchronous/Asynchronous Receiver/Transmitter)shaileeNo ratings yet
- Bidirectional Visitor Counter Using 8051 MicrocontrollerDocument22 pagesBidirectional Visitor Counter Using 8051 MicrocontrollerKaos Polos Nakira50% (2)
- C M ProjectDocument54 pagesC M ProjectCONVEX VENTURESNo ratings yet
- Names Matric Number: Raajapanndiyan Thankadurai 15DEM10F1044Document15 pagesNames Matric Number: Raajapanndiyan Thankadurai 15DEM10F1044Raajapanndiyan ThankaduraiNo ratings yet
- Smart Blind Stick Using ArduinoDocument8 pagesSmart Blind Stick Using ArduinoABHISEK SAHOONo ratings yet
- Smart Blind Stick Using ArduinoDocument8 pagesSmart Blind Stick Using ArduinoAditya PrakashNo ratings yet
- Mini Project ReportDocument9 pagesMini Project ReportShiekh LafeezNo ratings yet
- Automatic Street Light Control System Using Microcontroller: October 2013Document6 pagesAutomatic Street Light Control System Using Microcontroller: October 2013Parasuram SeelamNo ratings yet
- Pir Sensor Based Security System: Name of The MembersDocument4 pagesPir Sensor Based Security System: Name of The MembersMukesh PalsaniyaNo ratings yet
- B15580982S1119Document4 pagesB15580982S1119Reshma DurgasriNo ratings yet
- ElectronicsDocument18 pagesElectronicsSrinjay BhattacharyaNo ratings yet
- Line Follower Using AT89c51Document40 pagesLine Follower Using AT89c51api-26623078100% (6)
- PRJ p677Document8 pagesPRJ p677Rheymar BarcalaNo ratings yet
- Chapter TwoDocument39 pagesChapter TwodanielNo ratings yet
- Automatic Streetlights That Glow On Detecting Night and Object Using ArduinoDocument15 pagesAutomatic Streetlights That Glow On Detecting Night and Object Using Arduinojunaid hussainNo ratings yet
- Intelligent Train Engine To Avoid Accidents and Railway Gate ControllingDocument3 pagesIntelligent Train Engine To Avoid Accidents and Railway Gate ControllingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Animal Detection System in Farm Areas: IjarcceDocument5 pagesAnimal Detection System in Farm Areas: IjarcceSanketh ReddyNo ratings yet
- Autonoums Robotics Part 1: IR Led Detector CKTDocument14 pagesAutonoums Robotics Part 1: IR Led Detector CKTSameer SalamNo ratings yet
- ANDRAWDocument6 pagesANDRAWOdoch HerbertNo ratings yet
- Prosiding Paper 2010 EditDocument4 pagesProsiding Paper 2010 EditNizam RashidNo ratings yet
- Automatic Railway Gate Control SystemDocument4 pagesAutomatic Railway Gate Control SystemyeshanbelmitikieNo ratings yet
- Smart Street Lighting System An Energy Efficient ApproachDocument4 pagesSmart Street Lighting System An Energy Efficient ApproachNiko SijabatNo ratings yet
- ÁdasdasdDocument10 pagesÁdasdasdNguyễn Trường GiangNo ratings yet
- CHAPTER 1 - INTR-WPS OfficeDocument23 pagesCHAPTER 1 - INTR-WPS OfficeDavid NwankwereNo ratings yet
- Lab - 13 - PhotoInterupter and Proximity SensorDocument9 pagesLab - 13 - PhotoInterupter and Proximity SensorRahman ShafiqueNo ratings yet
- Btech ProjectDocument23 pagesBtech ProjectSiddhant SrivastavaNo ratings yet
- Automatic Pesticide Sprayer For Agriculture Purpose: Shalini D VDocument5 pagesAutomatic Pesticide Sprayer For Agriculture Purpose: Shalini D VKHANNo ratings yet
- Term Paper Street LightDocument3 pagesTerm Paper Street Lightjigyasa BhardwajNo ratings yet
- Wireless Electrical Appliances Using IR SensorsDocument8 pagesWireless Electrical Appliances Using IR SensorsmadhavNo ratings yet
- A Vehicle Movement Based Self-Organized Solar Powered StreetDocument14 pagesA Vehicle Movement Based Self-Organized Solar Powered StreetAshok PNo ratings yet
- Literature Review of The SystemDocument14 pagesLiterature Review of The Systemhsushweyi tint28No ratings yet
- Solar TrackerDocument16 pagesSolar TrackergalaxyNo ratings yet
- Principles of Infrared AlarmDocument12 pagesPrinciples of Infrared AlarmvijufbNo ratings yet
- 4 Way Security System Major CorrectedDocument72 pages4 Way Security System Major CorrectedMarndi KashrayNo ratings yet
- Fire Fighting RobotDocument60 pagesFire Fighting RobotkalaivaniNo ratings yet
- IoT Assign3Document13 pagesIoT Assign3Aryaman SoodNo ratings yet
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocument2 pagesDistance Measurement Using Ultrasonic Sensor and ArduinoAwais Zulfiqar75% (4)
- ReportDocument47 pagesReportMohammed Arshad AliNo ratings yet
- Design and Development of Intelligent Wireless Street Light Control and Monitoring System Along With GUIDocument5 pagesDesign and Development of Intelligent Wireless Street Light Control and Monitoring System Along With GUIfirdausmeow045No ratings yet
- PIR SensorDocument3 pagesPIR SensorNeha Kale0% (1)
- IJECE-SSRG - Pattern Recognition Using IRDocument2 pagesIJECE-SSRG - Pattern Recognition Using IRJabeena AfthabNo ratings yet
- BodyDocument18 pagesBodyAditya RajNo ratings yet
- Microcontroller, Sensors and BatteriesDocument5 pagesMicrocontroller, Sensors and Batteriesmatthewmonterola5No ratings yet
- RT8205LZQWDocument28 pagesRT8205LZQWcNo ratings yet
- Fortinet TransceiversDocument9 pagesFortinet Transceiversaxie iskolarNo ratings yet
- Name: P.Aswin Bharathi Date: 24-02-2021 Reg - Num: 9519005303 Experiment Number: 1 Study of Embedded Soc in Fpga AimDocument13 pagesName: P.Aswin Bharathi Date: 24-02-2021 Reg - Num: 9519005303 Experiment Number: 1 Study of Embedded Soc in Fpga AimbalaNo ratings yet
- HP Compaq Nc2400 Quick SpecsDocument33 pagesHP Compaq Nc2400 Quick SpecszoconNo ratings yet
- Implementation of An Energy Monitoring System Based On ArduinoDocument6 pagesImplementation of An Energy Monitoring System Based On Arduinoprabhu rachutiNo ratings yet
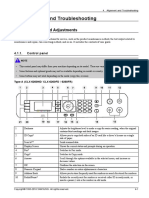
- 4 Troubleshooting CLX-6260 Series EngDocument67 pages4 Troubleshooting CLX-6260 Series EngOiluj Rasec Azuos OllemNo ratings yet
- PRJ - MOT Inventory FormtDocument9 pagesPRJ - MOT Inventory FormtKhaled IbrahimNo ratings yet
- Bosch Prs Nco B Network ControllerDocument4 pagesBosch Prs Nco B Network ControllerCheche BurecheNo ratings yet
- Dual Temperature Controller: 11. Wiring DiagramDocument1 pageDual Temperature Controller: 11. Wiring DiagramCARLOSNo ratings yet
- Tutorial Sheet-4, ES 103Document2 pagesTutorial Sheet-4, ES 103Krishan PrajapatiNo ratings yet
- Survivejs Webpack Apprentice MasterDocument380 pagesSurvivejs Webpack Apprentice MasterCesar LopezNo ratings yet
- FC Tranceiver 69Y2876-C - Datasheets - ENDocument6 pagesFC Tranceiver 69Y2876-C - Datasheets - ENY.FNo ratings yet
- EC ValuDocument8 pagesEC ValuTarun BambhaniyaNo ratings yet
- SHARE Pittsburgh IIB Internals of IBM Integration BusDocument79 pagesSHARE Pittsburgh IIB Internals of IBM Integration BusjimenavNo ratings yet
- Drive Test Training 2021Document35 pagesDrive Test Training 2021ibrahimNo ratings yet
- Itc Week 6Document59 pagesItc Week 6fanniNo ratings yet
- Lab Presentation 09.12.10Document15 pagesLab Presentation 09.12.10Nandkumar BhosaleNo ratings yet
- Course: Sonicwall Network Security Administrator (Snsa) For Sonicos 7Document3 pagesCourse: Sonicwall Network Security Administrator (Snsa) For Sonicos 7JoselitoNo ratings yet
- Charge Redistribution-I GreyDocument9 pagesCharge Redistribution-I GreyHarijot Singh BindraNo ratings yet
- All - Linux - Iptables at Master K00lith - All GitHubDocument3 pagesAll - Linux - Iptables at Master K00lith - All GitHubDoru Ciprian MuresanNo ratings yet
- Hadoop SparkDocument34 pagesHadoop SparkAkhilesh BharadwajNo ratings yet
- APC Back-UPS 700 ManualDocument2 pagesAPC Back-UPS 700 Manualİlteriş EroğluNo ratings yet
- RD 016 001 V 1.12 Rev5enDocument59 pagesRD 016 001 V 1.12 Rev5enVilius VNo ratings yet
- ProSens BrochureDocument11 pagesProSens BrochureDragomir AdrianNo ratings yet
- Lab2 VHDLDocument4 pagesLab2 VHDLMayank AgarwalNo ratings yet
- Introduction To Frequency-Selective Circuits: Assessment ProblemsDocument23 pagesIntroduction To Frequency-Selective Circuits: Assessment ProblemstkfdudNo ratings yet
- Section 16E Fire Alarm and Interactive Detection SystemDocument25 pagesSection 16E Fire Alarm and Interactive Detection SystemMark Roger II HuberitNo ratings yet
- RC3000 Manual SCHM Dec 05Document175 pagesRC3000 Manual SCHM Dec 05imbukhNo ratings yet
- 2N5038Document4 pages2N5038crackintheshatNo ratings yet