You might also like
- Future of RoboticsDocument7 pagesFuture of RoboticsEditor IJTSRDNo ratings yet
- Lecture 8. Mechanisms of EvolutionDocument85 pagesLecture 8. Mechanisms of EvolutionThu AnhNo ratings yet
- Genetic Disorders SourcebookDocument748 pagesGenetic Disorders Sourcebookpaconscribd100% (1)
- What Is RoboticsDocument11 pagesWhat Is RoboticsmmNo ratings yet
- Soft Robotics An OverviewDocument7 pagesSoft Robotics An OverviewEditor IJTSRDNo ratings yet
- Cadet Quiz FinalsDocument78 pagesCadet Quiz FinalsKumar2019No ratings yet
- Robotics & Robot ProgrammingDocument22 pagesRobotics & Robot ProgrammingDaniel OsineyeNo ratings yet
- A Practical Guide To Amplicon and Metagenomic Analysis of Microbiome DataDocument16 pagesA Practical Guide To Amplicon and Metagenomic Analysis of Microbiome DataLuisFrancisco BustamanteNo ratings yet
- Why Does The Future Need Us.Document26 pagesWhy Does The Future Need Us.Ar Mark Robles100% (4)
- Computer Project Robotics: Name: Ujaan Datta Class: 9 Section: B ROLL: 12Document28 pagesComputer Project Robotics: Name: Ujaan Datta Class: 9 Section: B ROLL: 12Ujaan DattaNo ratings yet
- Designer Babies LessonDocument13 pagesDesigner Babies LessonAnna OrzulakNo ratings yet
- The Cell Cycle ReviewerDocument3 pagesThe Cell Cycle ReviewerJoelle Noriko G. Galang0% (1)
- Basics of Robotics: Yuvraj Khelkar (SC69) Surabhi Annigeri (SC58) Shreyanshu Kodilkar (SC55)Document16 pagesBasics of Robotics: Yuvraj Khelkar (SC69) Surabhi Annigeri (SC58) Shreyanshu Kodilkar (SC55)SHREYANSHU KODILKAR100% (1)
- RoboticsDocument11 pagesRoboticsRodlyn RosalesNo ratings yet
- Robotics: R.U.R. (Rossum's Universal Robots)Document7 pagesRobotics: R.U.R. (Rossum's Universal Robots)Sky JarielNo ratings yet
- Role of Ethics in Artificial IntelligenceDocument7 pagesRole of Ethics in Artificial IntelligenceEditor IJTSRDNo ratings yet
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksFrom EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksNo ratings yet
- Robotics Handouts-Part1 PDFDocument25 pagesRobotics Handouts-Part1 PDFCarmela FranchescaNo ratings yet
- Ethical Concerns in Genetic Engineering c4Document115 pagesEthical Concerns in Genetic Engineering c4api-3803991No ratings yet
- Ubiquitous Robot: The Third Generation of RoboticsDocument8 pagesUbiquitous Robot: The Third Generation of Roboticsvpavankumar80No ratings yet
- The Third Generation of Robotics: Ubiquitous RobotDocument7 pagesThe Third Generation of Robotics: Ubiquitous RobotEnrique Campos RodríguezNo ratings yet
- The Third Generation of Robotics: Ubiquitous RobotDocument7 pagesThe Third Generation of Robotics: Ubiquitous Robotoliver malpartida custodioNo ratings yet
- Lecture Industrial Robots - 2019 - IntroductionDocument120 pagesLecture Industrial Robots - 2019 - IntroductionQuang NgôNo ratings yet
- Humanoid Robots FinalDocument24 pagesHumanoid Robots FinalDipansha ChoudharyNo ratings yet
- Sam TalkDocument26 pagesSam TalkNoel Dimakulangan SantosNo ratings yet
- Orca Share Media1674564744090 7023633604397174194Document4 pagesOrca Share Media1674564744090 7023633604397174194Graziella LazarteNo ratings yet
- All About Robots!!Document22 pagesAll About Robots!!adnrs100% (1)
- Seminar ONDocument12 pagesSeminar ONAtul SainiNo ratings yet
- Article 1Document3 pagesArticle 1Anugya ShuklaNo ratings yet
- מאַשין אַז איז גיידיד דורך אַ קאָמפּיוטער פּראָגראַם אָרעלעקטראָניק סערקאַטריDocument2 pagesמאַשין אַז איז גיידיד דורך אַ קאָמפּיוטער פּראָגראַם אָרעלעקטראָניק סערקאַטריFakhrul Risal DjuminginNo ratings yet
- Swarm Robotics An OverviewDocument8 pagesSwarm Robotics An OverviewEditor IJTSRDNo ratings yet
- Investigatory Project 9Document16 pagesInvestigatory Project 9Johanna MaxyneNo ratings yet
- Bio-Inspired Robots: Dept, Eee, EpcetDocument34 pagesBio-Inspired Robots: Dept, Eee, EpcetYogesh KumarNo ratings yet
- MajorDocument59 pagesMajorpramodNo ratings yet
- CREATIVE TECHNOLOGIES NotesDocument6 pagesCREATIVE TECHNOLOGIES NotessilverNo ratings yet
- Introduction To RoboticsDocument25 pagesIntroduction To RoboticsmageNo ratings yet
- CTech10 Lesson1Document28 pagesCTech10 Lesson1Neio Destine TingsonNo ratings yet
- Personal Edu RoboticsDocument4 pagesPersonal Edu RoboticsIvan AvramovNo ratings yet
- Robots The Thinking Machine of TomorrowDocument11 pagesRobots The Thinking Machine of TomorrowMojahid Abdulcarim Manapa-atNo ratings yet
- Swarm RoboticsDocument2 pagesSwarm RoboticsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Seminar ReportDocument18 pagesSeminar ReportCS084Rishav SinghNo ratings yet
- Cognitive Robotics GroupDocument6 pagesCognitive Robotics GroupNessa May Desiree SuganobNo ratings yet
- RoboticsDocument10 pagesRoboticsPihu ThakurNo ratings yet
- Swarmbot HardwaresssDocument40 pagesSwarmbot HardwaresssFaiza FatimaNo ratings yet
- Bot Robot (Disambiguation)Document8 pagesBot Robot (Disambiguation)zack geraldezNo ratings yet
- Basic For Robotics and Robots For Specific PurposeDocument42 pagesBasic For Robotics and Robots For Specific PurposerelvqxNo ratings yet
- Tests (Ethics and Robotics)Document10 pagesTests (Ethics and Robotics)DanWer CamposNo ratings yet
- Humanoid RobotsDocument25 pagesHumanoid RobotsRishabh SinghNo ratings yet
- Lec 1 UpdatedDocument60 pagesLec 1 Updatedmuhammad usamaNo ratings yet
- Humanoid RobotsDocument13 pagesHumanoid RobotsAyush PatelNo ratings yet
- Robot - WikipediaDocument40 pagesRobot - WikipediaTejasNo ratings yet
- The Future of Robots - Rodney BrooksDocument2 pagesThe Future of Robots - Rodney BrooksNorbert HunyadiNo ratings yet
- Humanoid Robots SeminarDocument28 pagesHumanoid Robots SeminarMan HunNo ratings yet
- Introduction To RoboticsDocument4 pagesIntroduction To RoboticsMaster PrintersNo ratings yet
- Robotics IeeeDocument38 pagesRobotics IeeePraveena AnnaduraiNo ratings yet
- Humanoid RobotsDocument26 pagesHumanoid RobotsAlan Abdiel RuizNo ratings yet
- Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) To Industrial Robots, Medical Operating Robots, PatientDocument15 pagesMobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) To Industrial Robots, Medical Operating Robots, PatientyashNo ratings yet
- 18iros CarVenVelDocument8 pages18iros CarVenVelRawatNo ratings yet
- The Quest For Robotethics A SurveyDocument36 pagesThe Quest For Robotethics A SurveyGabriel Alberto GomezNo ratings yet
- 2019 AreviewofArtificialIntelligenceandRobotics DailysunDocument3 pages2019 AreviewofArtificialIntelligenceandRobotics DailysunRoshaanNo ratings yet
- Department of Computer Science and Application Kurukshetra University KurukshetraDocument11 pagesDepartment of Computer Science and Application Kurukshetra University KurukshetraRaj VermaNo ratings yet
- STS L6.2 NotesDocument2 pagesSTS L6.2 NotesMaureen Sophia De MesaNo ratings yet
- Robotics: 3 Pillars of Robotics 1) SenseDocument12 pagesRobotics: 3 Pillars of Robotics 1) SenseKarya ÇelikNo ratings yet
- (6.2) Tech Hum Cross Part 2 Edt 9 (Module)Document2 pages(6.2) Tech Hum Cross Part 2 Edt 9 (Module)hazelNo ratings yet
- Robot ApplicationsDocument34 pagesRobot ApplicationsBarvinNo ratings yet
- Sri Yantra and The Geophilosophy of IndiaDocument3 pagesSri Yantra and The Geophilosophy of IndiaKumar2019No ratings yet
- Analytical Paragraph WritingDocument3 pagesAnalytical Paragraph WritingKumar2019No ratings yet
- Bhagavad GitaDocument10 pagesBhagavad GitaKumar2019No ratings yet
- CLASS X-Data Interpretation and AnalysisDocument2 pagesCLASS X-Data Interpretation and AnalysisKumar2019100% (1)
- Hidden Structure of BrainDocument9 pagesHidden Structure of BrainKumar2019No ratings yet
- Bangladeshi DiasporaDocument148 pagesBangladeshi DiasporaKumar2019No ratings yet
- Swami Vivekananda and Asian ConsciousnessDocument7 pagesSwami Vivekananda and Asian ConsciousnessKumar2019No ratings yet
- Improving Online Admission SystemDocument9 pagesImproving Online Admission SystemKumar2019No ratings yet
- Sydney Grammar 2019 English Trial Paper 1Document11 pagesSydney Grammar 2019 English Trial Paper 1Kristy LamNo ratings yet
- Cloning Research Paper ThesisDocument5 pagesCloning Research Paper Thesisgvytgh3b100% (1)
- Mitosis PowerpointDocument31 pagesMitosis PowerpointLeenfranzen MagadiaNo ratings yet
- Inheritance Chap 17Document23 pagesInheritance Chap 17Rayan KhanNo ratings yet
- A4357824 - 25335 - 11 - 2019 - Quantitative GeneticsDocument29 pagesA4357824 - 25335 - 11 - 2019 - Quantitative GeneticsAB NaSirNo ratings yet
- Observation 1 - Lesson Plan 01-25Document2 pagesObservation 1 - Lesson Plan 01-25api-350211422No ratings yet
- The Effects of Isolation and Genetic DriftDocument6 pagesThe Effects of Isolation and Genetic DrifttauhidjNo ratings yet
- Competent Cells and TransformationDocument22 pagesCompetent Cells and TransformationCarinaJongLeeNo ratings yet
- Jurnal: Identifikasi Kromosom Homolog Melalui Deteksi Pada Tanaman Bawang MerahDocument9 pagesJurnal: Identifikasi Kromosom Homolog Melalui Deteksi Pada Tanaman Bawang MerahImaniar FitriatasyaVWNo ratings yet
- Foundations of BiotechnologyDocument13 pagesFoundations of BiotechnologyShafiq SaweraNo ratings yet
- Bio222 - Lecture-00 Intro and Logistics - Key PDFDocument9 pagesBio222 - Lecture-00 Intro and Logistics - Key PDFIbrahim MNo ratings yet
- STEM ALL Sciences LO's 2019Document152 pagesSTEM ALL Sciences LO's 2019Mahmoud EbaidNo ratings yet
- Macrogen Sample Preparation GuideDocument6 pagesMacrogen Sample Preparation Guidekhalid WattoNo ratings yet
- Biology CoursesDocument6 pagesBiology CoursesJulia SNo ratings yet
- Mitosis Word SearchDocument1 pageMitosis Word SearchArshe OmaguingNo ratings yet
- Human CellDocument22 pagesHuman Cellsen_subhasis_58No ratings yet
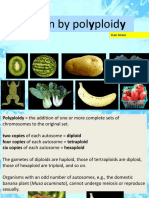
- Evolution by Polyploidy: Dan GraurDocument36 pagesEvolution by Polyploidy: Dan GraurSelvaraju ParthibhanNo ratings yet
- Shaw 2012Document17 pagesShaw 2012Cristopher Jimenez OrozcoNo ratings yet
- Cell DivisionDocument72 pagesCell Divisionnor ainiNo ratings yet
- LECTURE 9-Transgenic Technology in Marine Organisms PDFDocument26 pagesLECTURE 9-Transgenic Technology in Marine Organisms PDFIntan Lestari DewiNo ratings yet
- IARC Sci Pub 163 - Chapter 16Document22 pagesIARC Sci Pub 163 - Chapter 16MarinaNo ratings yet
- Chapter 6 Molecular Basis of Inheritance Unsolved Important QuestionsDocument9 pagesChapter 6 Molecular Basis of Inheritance Unsolved Important QuestionsDeep Kumar BasakNo ratings yet
- De NovoDocument5 pagesDe NovoGabriel BuftiaNo ratings yet
- Test Report: Mr. Kunj Patel 2010108804 19-Jan-2022 10:00 PM 28 Years MaleDocument1 pageTest Report: Mr. Kunj Patel 2010108804 19-Jan-2022 10:00 PM 28 Years MaleDevarsh PatelNo ratings yet