You might also like
- Quiz - Exercise - Mini-Case Instructions InstructionsDocument1 pageQuiz - Exercise - Mini-Case Instructions InstructionskhabiranNo ratings yet
- CapmDocument3 pagesCapmkhabiranNo ratings yet
- Landmark Facility Solutions - QuestionsDocument1 pageLandmark Facility Solutions - QuestionsFaig0% (1)
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDocument4 pagesCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNo ratings yet
- ICS Rules & Regulations and GuidanceDocument2 pagesICS Rules & Regulations and GuidancekhabiranNo ratings yet
- Dio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Document5 pagesDio 22b. Sprečavanje Onečišćenja - Izmjene Jan 2021Samo SpontanostNo ratings yet
- DavorinDujmovic PaperDavorinDujmovicDocument10 pagesDavorinDujmovic PaperDavorinDujmovickhabiranNo ratings yet
- Customer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustryDocument4 pagesCustomer Value Chain Analysis For Sustainable Reverse Logistics Implementation: Indonesian Mobile Phone IndustrykhabiranNo ratings yet
- No. F-14-AAA-0000Document9 pagesNo. F-14-AAA-0000khabiranNo ratings yet
- Ocean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationDocument12 pagesOcean Internet-of-Things // Networked Blue Economy: C-Accel Track RecommendationkhabiranNo ratings yet
- HjlinjftsaiDocument13 pagesHjlinjftsaikhabiranNo ratings yet
- Review of Charterer and Owner Relationship PDFDocument15 pagesReview of Charterer and Owner Relationship PDFShanti Prakhar AwasthiNo ratings yet
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDocument9 pagesA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNo ratings yet
- Overview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustryDocument16 pagesOverview of Health, Safety and Environmental Regulation Relating To The Offshore Oil and Gas IndustrykhabiranNo ratings yet
- United Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertDocument1 pageUnited Nations Industrial Development Organization: Single Workstation - Comfar Iii ExpertkhabiranNo ratings yet
- Service Note: ABB Solar Inverter Life Cycle ManagementDocument2 pagesService Note: ABB Solar Inverter Life Cycle ManagementkhabiranNo ratings yet
- 20120710ATT48612EN OriginalDocument16 pages20120710ATT48612EN OriginalkhabiranNo ratings yet
- Marine Safety Management Plan SummaryDocument37 pagesMarine Safety Management Plan Summarykhabiran100% (1)
- DNV GL Adv DP Verfication BC 3 2017Document1 pageDNV GL Adv DP Verfication BC 3 2017khabiranNo ratings yet
- Numerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationDocument9 pagesNumerical Simulation of Fluid Added Mass Effect On A Kaplan Turbine Runner With Experimental ValidationkhabiranNo ratings yet
- A Brief Review On Ndt&E Methods For Structural Aircraft ComponentsDocument9 pagesA Brief Review On Ndt&E Methods For Structural Aircraft ComponentskhabiranNo ratings yet
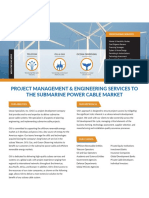
- Project Management & Engineering Services To The Submarine Power Cable MarketDocument2 pagesProject Management & Engineering Services To The Submarine Power Cable MarketkhabiranNo ratings yet
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDocument8 pagesShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- Orcaflex Standard Training Course Syllabus: Line TypesDocument3 pagesOrcaflex Standard Training Course Syllabus: Line TypeskhabiranNo ratings yet
- Shell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.EngDocument8 pagesShell Corrosion Allowance For Aboveground Storage Tanks: Debra Tetteh-Wayoe, P.Engkhabiran100% (1)
- Innovatum Tone GeneratorDocument8 pagesInnovatum Tone GeneratorGleison PrateadoNo ratings yet
- Nonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlDocument1 pageNonlinear Analysis of Offshore Structures: Bjo RN Skallerud Jo Rgen AmdahlkhabiranNo ratings yet
- Smallseotools 1617464053Document1 pageSmallseotools 1617464053khabiranNo ratings yet
- On Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbinesDocument1 pageOn Design, Modelling, and Analysis of A 10-MW Medium-Speed Drivetrain For Offshore Wind TurbineskhabiranNo ratings yet
- Fuel consumption rates for generator sets by KVA capacityDocument1 pageFuel consumption rates for generator sets by KVA capacitykhabiranNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Archive Update-Ansys-2020R2 MBU 090920Document76 pagesArchive Update-Ansys-2020R2 MBU 090920MellierNo ratings yet
- SPH MatlabDocument17 pagesSPH MatlabjahidNo ratings yet
- Computer Simulation of Large Scale Gap TestDocument8 pagesComputer Simulation of Large Scale Gap TestDhruv PatelNo ratings yet
- 3-D Numerical Analysis of Orthogonal Cutting Process Via Mesh-Free MethodDocument16 pages3-D Numerical Analysis of Orthogonal Cutting Process Via Mesh-Free MethodpramodgowdruNo ratings yet
- Investigations of Boundary Treatments in Incompressible Smoothed Particle Hydrodynamics For Fluid-Structural InteractionsDocument6 pagesInvestigations of Boundary Treatments in Incompressible Smoothed Particle Hydrodynamics For Fluid-Structural Interactionsclimax1364No ratings yet
- Crespo, Gómez-Gesteira, Dalrymple - 2008 - Modeling Dam Break Behavior Over A Wet Bed by A SPH TechniqueDocument8 pagesCrespo, Gómez-Gesteira, Dalrymple - 2008 - Modeling Dam Break Behavior Over A Wet Bed by A SPH TechniqueSatya PrakashNo ratings yet
- Fluid Structure Interaction EffectsDocument51 pagesFluid Structure Interaction EffectsvttrlcNo ratings yet
- Benjamin BouscasseDocument271 pagesBenjamin BouscasseAditya PawarNo ratings yet
- Computational Astrophysics Numerical MethodsDocument19 pagesComputational Astrophysics Numerical MethodsCarlos Alberto Dutra Fraga FilhoNo ratings yet
- GADGET: A Code For Collisionless and Gasdynamical Cosmological SimulationsDocument32 pagesGADGET: A Code For Collisionless and Gasdynamical Cosmological SimulationsliaNo ratings yet
- New Concepts in Meshless Methods: S. N. Atluri and Tulong ZhuDocument20 pagesNew Concepts in Meshless Methods: S. N. Atluri and Tulong ZhuJemi JollyNo ratings yet
- DEM-SPH simulation of rock blastingDocument7 pagesDEM-SPH simulation of rock blastingIonut PatrasNo ratings yet
- Meshless Methods in LS-DYNA: An Overview of EFG and SPHDocument43 pagesMeshless Methods in LS-DYNA: An Overview of EFG and SPHLe Anh TuanNo ratings yet
- SPH BirdStrike StepByStep Abaqus611Document9 pagesSPH BirdStrike StepByStep Abaqus611Vaibhav Phadnis67% (3)
- Paper Pronto3DDocument231 pagesPaper Pronto3DAdamDNo ratings yet
- High Performance Computing in Science and Engineering 16Document665 pagesHigh Performance Computing in Science and Engineering 16Kamchatka TacalaskaNo ratings yet
- DualSPHysics v4.0 GUIDE PDFDocument140 pagesDualSPHysics v4.0 GUIDE PDFFelipe A Maldonado GNo ratings yet
- SPH Without A Tensile InstabilityDocument22 pagesSPH Without A Tensile InstabilityPeter HanappeNo ratings yet
- DALRYMPLE, ROGERS Numerical Modeling of Water Waves With The SPH MethodDocument7 pagesDALRYMPLE, ROGERS Numerical Modeling of Water Waves With The SPH MethodCarlos Alberto Dutra Fraga FilhoNo ratings yet
- PixelJunk Shooter Fluid Sim and RenderingDocument60 pagesPixelJunk Shooter Fluid Sim and Renderingokonomi_801xNo ratings yet
- GPUSPH Theory Guide: SPH Approximation and KernelsDocument24 pagesGPUSPH Theory Guide: SPH Approximation and KernelsaaaNo ratings yet
- DualSPHysics v3.0 GUIDE PDFDocument89 pagesDualSPHysics v3.0 GUIDE PDFfjpd15No ratings yet
- Ceramic Balls Protected Ultra-High Performance Concrete Structure AgainstDocument20 pagesCeramic Balls Protected Ultra-High Performance Concrete Structure AgainstMurali Gunasekaran100% (1)
- SPH Main by Kelager.06Document88 pagesSPH Main by Kelager.06marthantyNo ratings yet
- Fluid Simulation in Tetrahedral Mesh Using Hybrid MethodDocument31 pagesFluid Simulation in Tetrahedral Mesh Using Hybrid MethodDongsoo HanNo ratings yet
- Explicit Dynamics FeaturesDocument7 pagesExplicit Dynamics Featuresom12315No ratings yet
- SPHTitle-NewSPHFeatureinLS-DYNADocument6 pagesSPHTitle-NewSPHFeatureinLS-DYNABarath SundarNo ratings yet
- Multiphase SPH Simulation For Interactive Fluids and SolidsDocument11 pagesMultiphase SPH Simulation For Interactive Fluids and SolidsFlynn HawkNo ratings yet
- DualSPHysics v4.0 GUIDEDocument140 pagesDualSPHysics v4.0 GUIDESiddhant AgarwalNo ratings yet
- Abaqus 6.11 Overview PDFDocument39 pagesAbaqus 6.11 Overview PDFAnya CooperNo ratings yet