You might also like
- 1 Prof Chauvins Instructions For Bingham CH 4Document35 pages1 Prof Chauvins Instructions For Bingham CH 4Danielle Baldwin100% (2)
- 3g Node B On Ip MediaDocument79 pages3g Node B On Ip MediaBsskkd KkdNo ratings yet
- Engineering Electromagnetic Fields and Waves 2nd EditionDocument638 pagesEngineering Electromagnetic Fields and Waves 2nd EditionMansour ElmabroukNo ratings yet
- DerivativeDocument38 pagesDerivativeEladio LagosNo ratings yet
- Catic at All PaperDocument13 pagesCatic at All PaperKrzyszto FPNo ratings yet
- 1101 3649 PDFDocument40 pages1101 3649 PDFNaveen KumarNo ratings yet
- Isi Mtech Qror 07Document34 pagesIsi Mtech Qror 07api-26401608No ratings yet
- Isi Mtech Qror 08Document36 pagesIsi Mtech Qror 08api-26401608No ratings yet
- Electromagnetic Field Theory: A Problem Solving ApproachDocument11 pagesElectromagnetic Field Theory: A Problem Solving ApproachahmdNo ratings yet
- Correlation and ConvolutionDocument15 pagesCorrelation and Convolutionতাহমিম হোসেন তূর্যNo ratings yet
- Rank Indicator Modeling in Ibwave Design - White PaperDocument17 pagesRank Indicator Modeling in Ibwave Design - White PaperFrancisco RomanoNo ratings yet
- ISI MStat PSB Past Year Paper 2014Document6 pagesISI MStat PSB Past Year Paper 2014Vinay Kumar ChennojuNo ratings yet
- Riciain Channel Capacity Comparison Between (8X8) and (4x4) MIMODocument5 pagesRiciain Channel Capacity Comparison Between (8X8) and (4x4) MIMOseventhsensegroupNo ratings yet
- SdarticleDocument9 pagesSdarticleSachin KumarNo ratings yet
- Representation and Modeling of Spherical Harmonics Manifold For Source LocalizationDocument5 pagesRepresentation and Modeling of Spherical Harmonics Manifold For Source LocalizationLalanKumarNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- Ph.D. Selection Test Department of Physics Indian Institute of Technology, KanpurDocument5 pagesPh.D. Selection Test Department of Physics Indian Institute of Technology, KanpurRavi RoyNo ratings yet
- Fuzzy 5Document12 pagesFuzzy 5Basma ElNo ratings yet
- Mathematical Methods (Second Year) MT 2009 Problem Set 1: Linear Algebra IDocument2 pagesMathematical Methods (Second Year) MT 2009 Problem Set 1: Linear Algebra IRoy VeseyNo ratings yet
- Ellipse OverlapsDocument11 pagesEllipse Overlapsfiore.mirkoNo ratings yet
- Lecture 1: Revision of Vector Analysis: 1.1.1 Vectors and ScalarsDocument7 pagesLecture 1: Revision of Vector Analysis: 1.1.1 Vectors and ScalarsSudesh Fernando Vayanga SubasinghaNo ratings yet
- Calculating A Path AlgorithmDocument13 pagesCalculating A Path AlgorithmredgoriyaNo ratings yet
- PHD QuestionsDocument3 pagesPHD QuestionsSamadhan KambleNo ratings yet
- Numerical Analysis and MethodsDocument28 pagesNumerical Analysis and MethodsbromikeseriesNo ratings yet
- Function Generation Using Freudenstein's EquationDocument15 pagesFunction Generation Using Freudenstein's Equationvenkatanaveen306No ratings yet
- Parameter Estimation For Operator Scaling Ran 2014 Journal of Multivariate ADocument12 pagesParameter Estimation For Operator Scaling Ran 2014 Journal of Multivariate AfmokademNo ratings yet
- GraphsDocument14 pagesGraphsYogesh GairolaNo ratings yet
- Evaluation of Relative Pose Estimation Methods For Multi-Camera SetupsDocument6 pagesEvaluation of Relative Pose Estimation Methods For Multi-Camera Setupsomid fazliNo ratings yet
- Applied Mathematics and Mechanics: (English Edition)Document10 pagesApplied Mathematics and Mechanics: (English Edition)asifiqbal84No ratings yet
- ActingDocument1 pageActingFadhil SahibNo ratings yet
- 2005 - TP2Document4 pages2005 - TP2SpringOrchidNo ratings yet
- Generation of Shape Functions For Straight Beam ElementsDocument9 pagesGeneration of Shape Functions For Straight Beam ElementsMyron OikonomakisNo ratings yet
- Section A: Pure MathematicsDocument7 pagesSection A: Pure MathematicshmphryNo ratings yet
- (2019) Piecewise Reproducing Kernel Method For Linear Impulsive Delay Differential Equations With Piecewise Constant ArgumentsDocument10 pages(2019) Piecewise Reproducing Kernel Method For Linear Impulsive Delay Differential Equations With Piecewise Constant ArgumentsAlejandro ChiuNo ratings yet
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocument4 pagesEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNo ratings yet
- SS QuestionsDocument1 pageSS Questionssrivallikasturi44No ratings yet
- SPIE19 Sparsity Based Collaborative Sensing in A Scalable Wireless NetworkDocument8 pagesSPIE19 Sparsity Based Collaborative Sensing in A Scalable Wireless Network张水梅No ratings yet
- AETN3111-L3-Vector AnalysisDocument42 pagesAETN3111-L3-Vector Analysissonahassan70007No ratings yet
- Lab # 1Document13 pagesLab # 1Siraj KhanNo ratings yet
- Exam 2017 SoutionDocument15 pagesExam 2017 SoutionSushil AcharyaNo ratings yet
- Articol Discretizare CNGF 2020Document8 pagesArticol Discretizare CNGF 2020adrian0149No ratings yet
- Quantum Chemistry II, Homework I: 1 ProblemDocument4 pagesQuantum Chemistry II, Homework I: 1 ProblemJulieth Moreno0% (1)
- FreudDocument15 pagesFreudKrishnanath ReghunadhanNo ratings yet
- New Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsDocument6 pagesNew Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsInternational Organization of Scientific Research (IOSR)No ratings yet
- (B4 2sided) Dynamic Stiffness (H. Ma 2008) - Exact Solution of Vibration Problems of Frame StructuresDocument12 pages(B4 2sided) Dynamic Stiffness (H. Ma 2008) - Exact Solution of Vibration Problems of Frame Structuresali mortazaviNo ratings yet
- Vector and Matrix NormDocument17 pagesVector and Matrix NormpaivensolidsnakeNo ratings yet
- Vectors and Matrices, Problem Set 3: Scalar Products and DeterminantsDocument3 pagesVectors and Matrices, Problem Set 3: Scalar Products and DeterminantsRoy VeseyNo ratings yet
- notesForCalc2 Curves 20221202Document36 pagesnotesForCalc2 Curves 20221202Vinicius BrunoNo ratings yet
- 3-D Localization of An Underwater Sound Source (Pinger) Using A Passive SONAR SystemDocument5 pages3-D Localization of An Underwater Sound Source (Pinger) Using A Passive SONAR SystemGek CagatanNo ratings yet
- 迭代估计带应用Document14 pages迭代估计带应用彭力No ratings yet
- Homework 4Document4 pagesHomework 4fiery punctuationNo ratings yet
- Edge Detection: Xy, and Y2, We Will Approximate - L (M+X, N+y) - L (M, N) - (L (M+X, N+y) - L (M, N) ) by The LinearDocument25 pagesEdge Detection: Xy, and Y2, We Will Approximate - L (M+X, N+y) - L (M, N) - (L (M+X, N+y) - L (M, N) ) by The LinearRizky BangkitNo ratings yet
- (eBook-PDF) - Mathematics - Compare Adaptive AlgorithmsDocument4 pages(eBook-PDF) - Mathematics - Compare Adaptive AlgorithmsrobNo ratings yet
- Solution 2Document6 pagesSolution 2student mail0% (1)
- Frequency ResponseDocument10 pagesFrequency ResponseDan AdrianNo ratings yet
- Curve and Surface Fitting Models Based On The Diagonalizable Differential SystemsDocument26 pagesCurve and Surface Fitting Models Based On The Diagonalizable Differential SystemsLayla VuNo ratings yet
- Computer Network Homework HelpDocument12 pagesComputer Network Homework HelpComputer Network Assignment HelpNo ratings yet
- Isi Mtech Qror 05Document20 pagesIsi Mtech Qror 05api-26401608No ratings yet
- Journal of Computational and Applied Mathematics: Zhong-Zhi Bai, Xi YangDocument15 pagesJournal of Computational and Applied Mathematics: Zhong-Zhi Bai, Xi YangJese MadridNo ratings yet
- Mathematical Tripos Part IADocument7 pagesMathematical Tripos Part IAChristopher HitchensNo ratings yet
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Tensor Voting: Theory and Applications: Gérard Medioni Chi-Keung Tang Mi-Suen LeeDocument10 pagesTensor Voting: Theory and Applications: Gérard Medioni Chi-Keung Tang Mi-Suen LeeM Rameez Ur RehmanNo ratings yet
- Instructions Residencepermitapplication Study PHD - EnG 14-6-18Document5 pagesInstructions Residencepermitapplication Study PHD - EnG 14-6-18M Rameez Ur RehmanNo ratings yet
- 19 Detection of Electrophysiology CathersDocument8 pages19 Detection of Electrophysiology CathersM Rameez Ur RehmanNo ratings yet
- xx08 SIreview PDFDocument22 pagesxx08 SIreview PDFM Rameez Ur RehmanNo ratings yet
- Bayes Optimization For Machine LearningDocument29 pagesBayes Optimization For Machine LearningM Rameez Ur RehmanNo ratings yet
- Modeling and Simulation of A Moving Robot Arm Mounted On WheelchairDocument5 pagesModeling and Simulation of A Moving Robot Arm Mounted On WheelchairM Rameez Ur RehmanNo ratings yet
- 2Pqlgluhfwlrqdo9Lvlrqedvhg3Rvh&Rqwuroehwzhhq7Zr5Rerwv:, 1 - LD DQJ/L &+ (1+DL/RQJDocument6 pages2Pqlgluhfwlrqdo9Lvlrqedvhg3Rvh&Rqwuroehwzhhq7Zr5Rerwv:, 1 - LD DQJ/L &+ (1+DL/RQJM Rameez Ur RehmanNo ratings yet
- Convex Optimization in Image Processing: Ernie EsserDocument9 pagesConvex Optimization in Image Processing: Ernie EsserM Rameez Ur RehmanNo ratings yet
- Robot Trajectory Optimization Using Approximate InferenceDocument8 pagesRobot Trajectory Optimization Using Approximate InferenceM Rameez Ur RehmanNo ratings yet
- 3 Recitation StochasticGradientDescentDocument10 pages3 Recitation StochasticGradientDescentM Rameez Ur RehmanNo ratings yet
- WWW Hackingdream Net 2015 05 Hack Wifi Wpa Wpa2 Wps in WindoDocument71 pagesWWW Hackingdream Net 2015 05 Hack Wifi Wpa Wpa2 Wps in WindoM Rameez Ur Rehman0% (1)
- WWW Electronicslovers Com 2015 09 Arduino Based MPPT Solar CDocument35 pagesWWW Electronicslovers Com 2015 09 Arduino Based MPPT Solar CM Rameez Ur RehmanNo ratings yet
- Phy SopsDocument171 pagesPhy SopsM Rameez Ur RehmanNo ratings yet
- Advantages Renewable Energy Resources Environmental Sciences EssayDocument3 pagesAdvantages Renewable Energy Resources Environmental Sciences EssayCemerlang StudiNo ratings yet
- April 2021 BDA Case Study - GroupDocument4 pagesApril 2021 BDA Case Study - GroupTinashe Chirume1No ratings yet
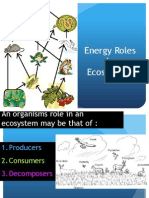
- Energy-Roles-In-Ecosystems-Notes-7 12bDocument10 pagesEnergy-Roles-In-Ecosystems-Notes-7 12bapi-218158367No ratings yet
- PNGRB - Electrical Safety Audit ChecklistDocument4 pagesPNGRB - Electrical Safety Audit ChecklistKritarth SrivastavNo ratings yet
- Steel Price Index PresentationDocument12 pagesSteel Price Index PresentationAnuj SinghNo ratings yet
- Auditory Evoked Potentials - AEPs - Underlying PrinciplesDocument19 pagesAuditory Evoked Potentials - AEPs - Underlying PrinciplesMansi SinghNo ratings yet
- List of Modern Equipment and Farm ToolsDocument15 pagesList of Modern Equipment and Farm ToolsCarl Johnrich Quitain100% (2)
- Bustax Midtem Quiz 1 Answer Key Problem SolvingDocument2 pagesBustax Midtem Quiz 1 Answer Key Problem Solvingralph anthony macahiligNo ratings yet
- Cosmic Handbook PreviewDocument9 pagesCosmic Handbook PreviewnkjkjkjNo ratings yet
- What Are The Advantages and Disadvantages of UsingDocument4 pagesWhat Are The Advantages and Disadvantages of UsingJofet Mendiola88% (8)
- Module 2Document7 pagesModule 2karthik karti100% (1)
- Smart Plug Installation GuideDocument9 pagesSmart Plug Installation GuideFrancisco GuerreroNo ratings yet
- Beautiful SpotsDocument2 pagesBeautiful SpotsLouise Yongco100% (1)
- Astm D2000 PDFDocument38 pagesAstm D2000 PDFMariano Emir Garcia OdriozolaNo ratings yet
- ATAL Selected FDPs AY 2023 24Document15 pagesATAL Selected FDPs AY 2023 24parthiban palanisamy100% (2)
- EmployWise JAVA ASSIGNMENTDocument2 pagesEmployWise JAVA ASSIGNMENTPreet PatelNo ratings yet
- Coco Mavdi Esl5Document6 pagesCoco Mavdi Esl5gaurav222980No ratings yet
- TAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1Document69 pagesTAC42055 - HO01 Edition I2.0: Section 1 Module 1 Page 1matheus santosNo ratings yet
- Corporate Tax Planning AY 2020-21 Sem V B.ComH - Naveen MittalDocument76 pagesCorporate Tax Planning AY 2020-21 Sem V B.ComH - Naveen MittalNidhi LathNo ratings yet
- MiddleWare Technology - Lab Manual JWFILESDocument171 pagesMiddleWare Technology - Lab Manual JWFILESSangeetha BajanthriNo ratings yet
- June 2014 (v3) QP - Paper 3 CIE Physics IGCSEDocument20 pagesJune 2014 (v3) QP - Paper 3 CIE Physics IGCSECole KhantNo ratings yet
- 2001 Ford F150 ManualDocument296 pages2001 Ford F150 Manualerjenkins1100% (2)
- Micro - Systemic Bacteriology Questions PDFDocument79 pagesMicro - Systemic Bacteriology Questions PDFShashipriya AgressNo ratings yet
- Durability of Prestressed Concrete StructuresDocument12 pagesDurability of Prestressed Concrete StructuresMadura JobsNo ratings yet
- Using Visual Rating To Diagnose DementiaDocument10 pagesUsing Visual Rating To Diagnose DementiaImágenes Rosendo GarcíaNo ratings yet
- Nikasil e AlusilDocument5 pagesNikasil e AlusilIo AncoraioNo ratings yet
- Remedy MidTier Guide 7-5Document170 pagesRemedy MidTier Guide 7-5martin_wiedmeyerNo ratings yet
- Maharashtra State Board 9th STD History and Political Science Textbook EngDocument106 pagesMaharashtra State Board 9th STD History and Political Science Textbook EngSomesh Kamad100% (2)