You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Wireman, Terry - Training Programs For Maintenance Organizations - Maintenance Strategy Series (2013, Reliabilityweb Com)Document221 pagesWireman, Terry - Training Programs For Maintenance Organizations - Maintenance Strategy Series (2013, Reliabilityweb Com)Faiza TariqNo ratings yet
- Fundamentals of Rock MechanicsDocument4 pagesFundamentals of Rock Mechanicsmaomao_vt890% (1)
- Hot Work ProcedureDocument10 pagesHot Work ProcedureOws AnishNo ratings yet
- Guide To Petrophysical Interpretation PDFDocument147 pagesGuide To Petrophysical Interpretation PDFDwiandaru DarmawanNo ratings yet
- Busbar Design GuideDocument22 pagesBusbar Design Guidejohnwu_2009100% (6)
- Planning For Procurement of Construction ContractsDocument41 pagesPlanning For Procurement of Construction ContractsJoel AlcantaraNo ratings yet
- Commercial Office Space - Cyber CityDocument8 pagesCommercial Office Space - Cyber CityankurNo ratings yet
- SEMIKRON Product Catalogue 2014 2015Document167 pagesSEMIKRON Product Catalogue 2014 2015cesar oliveira0% (1)
- Biogas Technology: Construction, Utilization and Operation ManualDocument52 pagesBiogas Technology: Construction, Utilization and Operation ManualDwi Cahyo NugrohoNo ratings yet
- (John Tabak) Natural Gas and Hydrogen (Energy and (Book4You)Document225 pages(John Tabak) Natural Gas and Hydrogen (Energy and (Book4You)Omar Chayña VelásquezNo ratings yet
- A Wavelet - Based Fault LocalizationDocument5 pagesA Wavelet - Based Fault LocalizationOmar Chayña VelásquezNo ratings yet
- Catalogue PDFDocument38 pagesCatalogue PDFOmar Chayña VelásquezNo ratings yet
- Mare Tte 2017Document13 pagesMare Tte 2017Omar Chayña VelásquezNo ratings yet
- Automatic Distance Relay PDFDocument4 pagesAutomatic Distance Relay PDFOmar Chayña VelásquezNo ratings yet
- Relay For Transformer Backup ProtectionDocument6 pagesRelay For Transformer Backup ProtectionOmar Chayña VelásquezNo ratings yet
- Dimensioning Cts For Small Generator DifferentialDocument8 pagesDimensioning Cts For Small Generator DifferentialOmar Chayña VelásquezNo ratings yet
- Differential Protection Based On Zero-SequenceDocument6 pagesDifferential Protection Based On Zero-SequenceOmar Chayña VelásquezNo ratings yet
- Remedial For Faults Synchronous: ControllerDocument1 pageRemedial For Faults Synchronous: ControllerOmar Chayña VelásquezNo ratings yet
- Analysis of Synchronous Generator Internal Insulation FailuresDocument5 pagesAnalysis of Synchronous Generator Internal Insulation FailuresOmar Chayña VelásquezNo ratings yet
- Manual Multisim 2001 (Ingles)Document72 pagesManual Multisim 2001 (Ingles)Anonymous W1QQcbA4sWNo ratings yet
- Heat Ad Mass Transfer in A Cooling Tower With Special Attention To The Tower Characteristic RatioDocument5 pagesHeat Ad Mass Transfer in A Cooling Tower With Special Attention To The Tower Characteristic RatioAathithyayanSoundararajanNo ratings yet
- Yale PD2, C85, D85Document28 pagesYale PD2, C85, D85LGWILDCAT73No ratings yet
- Verilog Implementation of Reed - Solomon CodeDocument16 pagesVerilog Implementation of Reed - Solomon CodeManik Prabhu ChillalNo ratings yet
- Nokia c7-00 Rm-675 Rm-691 Service Manual-12 v6Document32 pagesNokia c7-00 Rm-675 Rm-691 Service Manual-12 v6sasquatch69No ratings yet
- Implifier PanssonicDocument5 pagesImplifier PanssonicSergs LluismaNo ratings yet
- Olefins-All Product CatalogDocument28 pagesOlefins-All Product Catalogayon_hossen242No ratings yet
- LCD TV: Service ManualDocument74 pagesLCD TV: Service Manualismosch50% (2)
- Iv2906 Iveco Ad380t42h 6x4Document2 pagesIv2906 Iveco Ad380t42h 6x4أبو خالد الأثرىNo ratings yet
- OTN Training-Lv1-Fonst 3000 Equipment IntroductionDocument28 pagesOTN Training-Lv1-Fonst 3000 Equipment IntroductionJenny Rodriguez Aguirre100% (1)
- Greenstar Cdi Installation ManualDocument60 pagesGreenstar Cdi Installation Manualkb1856No ratings yet
- The Flow Chart of Tires Pyrolysis EquipmentDocument4 pagesThe Flow Chart of Tires Pyrolysis EquipmentpyrolysisoilNo ratings yet
- Csi Sap2000 Example 1-008Document4 pagesCsi Sap2000 Example 1-008Juan Pablo González CarballoNo ratings yet
- MBD Asrock Imb150n ManualDocument39 pagesMBD Asrock Imb150n ManualLaur IriNo ratings yet
- Ms2N Synchronous Servomotors: Project Planning ManualDocument408 pagesMs2N Synchronous Servomotors: Project Planning ManualGuido PerezNo ratings yet
- Hitide 2i (BP)Document4 pagesHitide 2i (BP)Biju_PottayilNo ratings yet
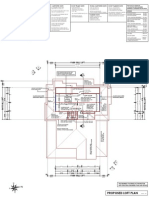
- LoftplanDocument1 pageLoftplanapi-228799117No ratings yet
- SVT-RM10: Remote Control UnitDocument2 pagesSVT-RM10: Remote Control UnitJOGITELENo ratings yet
- Assignment 1 Low Temperature and SuperconductivityDocument3 pagesAssignment 1 Low Temperature and SuperconductivityNadhrah MuradNo ratings yet
- Paradox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlDocument1 pageParadox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlTech StarNo ratings yet
- Column Marking For G+4 Hostel Building: All Dimensions Are in MeterDocument1 pageColumn Marking For G+4 Hostel Building: All Dimensions Are in Metergowtham gowdaNo ratings yet