You might also like
- Arduino: A Beginner's Guide to Arduino ProgrammingFrom EverandArduino: A Beginner's Guide to Arduino ProgrammingRating: 3 out of 5 stars3/5 (1)
- Mini Inverter: By: D. Aparna 17311A0296 Eee-BDocument18 pagesMini Inverter: By: D. Aparna 17311A0296 Eee-BAparna DevulapalliNo ratings yet
- Arduino Based Automatic Water Level Indicator and Controller Project With Circuit Diagram & CodeDocument27 pagesArduino Based Automatic Water Level Indicator and Controller Project With Circuit Diagram & Codeoussama bouguerra100% (2)
- Arduino Based Tachometer Plus Speed ControlDocument41 pagesArduino Based Tachometer Plus Speed Controlujjwal mishra100% (1)
- Automatic Staircase LightningDocument23 pagesAutomatic Staircase LightningAniket Pawar100% (3)
- Automatic Water Tank Filling SystemDocument5 pagesAutomatic Water Tank Filling SystemMuhammad AliNo ratings yet
- Advantages of CmosDocument4 pagesAdvantages of CmosvinaycmosNo ratings yet
- Voice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Document16 pagesVoice Controlled Car: BS Documentation by Hammad Malik (F16-1244) Arslan Ali (F16-1160) Hassam Akram (F16-1153)Rana Arslan100% (1)
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocument6 pagesArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNo ratings yet
- How To Simulate Speaker With Equivalent RLC Circuit PDFDocument15 pagesHow To Simulate Speaker With Equivalent RLC Circuit PDFShailaja UdtewarNo ratings yet
- Sensorless BLDC Motor Control With Arduino - DIY ESC - Simple Projects PDFDocument19 pagesSensorless BLDC Motor Control With Arduino - DIY ESC - Simple Projects PDFArka Patra0% (1)
- Auto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerDocument23 pagesAuto Power Supply Control From 4 Different Sources Solar, Mains, Generator & Inverter To Ensure No Break PowerAnonymous QIuAGIadXm69% (13)
- Construction of Automatic Water Level Controller For Both Overhead and Underground TanksDocument70 pagesConstruction of Automatic Water Level Controller For Both Overhead and Underground Tanksmyhomenet119188125% (4)
- Final Year PPT GroupDocument12 pagesFinal Year PPT GroupritamNo ratings yet
- 12v Battery Charger Circuit With Auto Cut Off - Circuits GalleryDocument40 pages12v Battery Charger Circuit With Auto Cut Off - Circuits GalleryRamKumar0% (1)
- Speed Control of BLDC MotorDocument5 pagesSpeed Control of BLDC Motorgourav kakhaniNo ratings yet
- PROJCTDocument32 pagesPROJCTSwati Agarwal100% (1)
- 12V DC To 220V AC InverterDocument5 pages12V DC To 220V AC InverterAhmed ArifNo ratings yet
- BBGDocument8 pagesBBGGrandeurNo ratings yet
- Remote Control Fan RegulatorDocument42 pagesRemote Control Fan Regulatorshiningstar_abhi376567% (3)
- Final Report PDFDocument30 pagesFinal Report PDFVidhya Kn50% (2)
- S124-Solar Based Mobile Charger For Rural AreasDocument4 pagesS124-Solar Based Mobile Charger For Rural AreasYellaturi Siva Kishore ReddyNo ratings yet
- ACKNOWLEDGEMENTDocument3 pagesACKNOWLEDGEMENTmohan SRNo ratings yet
- Lic Eec-501 Notes Unit5 Iftm UniversityDocument14 pagesLic Eec-501 Notes Unit5 Iftm UniversitySougata GhoshNo ratings yet
- Bluetooth Controlled Robot Car PDFDocument18 pagesBluetooth Controlled Robot Car PDFrashmi100% (1)
- Sagar Institute of Science and Technology Bhopal, M.P: 8051 Based Thyristor Firing CircuitDocument3 pagesSagar Institute of Science and Technology Bhopal, M.P: 8051 Based Thyristor Firing Circuitsiddharth singh67% (3)
- Contact Less Tachometer: IC 741c:an IC 741c Is Single Op-Amp Device. AnDocument6 pagesContact Less Tachometer: IC 741c:an IC 741c Is Single Op-Amp Device. Anravi prakashNo ratings yet
- Power Efficient Mini InverterDocument9 pagesPower Efficient Mini Inverternadia mustafa100% (1)
- Automatic Water Level Indicator and Controller Using ArduinoDocument6 pagesAutomatic Water Level Indicator and Controller Using ArduinoHari Haran100% (1)
- Arduino IDE Programming - Simple Interrupt ApplicationDocument18 pagesArduino IDE Programming - Simple Interrupt ApplicationPearl Joyce SubereNo ratings yet
- Power Factor Measurement & Correction: Prepared By: Guided byDocument29 pagesPower Factor Measurement & Correction: Prepared By: Guided bySunil PillaiNo ratings yet
- Digital Logic Design ProjectsDocument23 pagesDigital Logic Design ProjectsMychon KanNo ratings yet
- Autonomous Floor Cleaning Robot With Infrared and UltrasonicDocument7 pagesAutonomous Floor Cleaning Robot With Infrared and UltrasonicInternational Journal of Innovative Science and Research Technology100% (1)
- Project Electrical Equipments Control Through SoundDocument44 pagesProject Electrical Equipments Control Through SoundMicron MegaNo ratings yet
- Ac To High Voltage DC Using Voltage Multiplier CircuitDocument2 pagesAc To High Voltage DC Using Voltage Multiplier Circuitdaktarnaik95100% (1)
- Project Report PDFDocument78 pagesProject Report PDFrijilpoothadi71% (7)
- Arduino Modules L298N Dual H Bridge Motor ControllDocument7 pagesArduino Modules L298N Dual H Bridge Motor ControllMarius DanilaNo ratings yet
- Literature Review of BLDC MotorDocument25 pagesLiterature Review of BLDC MotorOcean PaudelNo ratings yet
- Industrial Conveyors Belt Counting Object SystemDocument15 pagesIndustrial Conveyors Belt Counting Object SystemRavi Joshi100% (1)
- Arduino Solar Tracker Using LDR and Servo MotorDocument9 pagesArduino Solar Tracker Using LDR and Servo MotorAvnish SharmaNo ratings yet
- Solutions For Assignment - 2Document3 pagesSolutions For Assignment - 2KarthikeyanKarun75% (4)
- Ultrasonic Distance Meter 1Document21 pagesUltrasonic Distance Meter 1Naseef Parambattu PalliyaliNo ratings yet
- Automatic Change-Over SwitchDocument7 pagesAutomatic Change-Over SwitchFaizan NazirNo ratings yet
- Design A Simple Audio Amplifier Using LM386Document12 pagesDesign A Simple Audio Amplifier Using LM386adnan_westridgian100% (2)
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- 2018 Arduino Projects List About 2745 Arduino List of ProjectsUse Arduino For Projects PDFDocument148 pages2018 Arduino Projects List About 2745 Arduino List of ProjectsUse Arduino For Projects PDFSCORSAM1100% (1)
- Synchronous Motor and Asynchronous MotorDocument3 pagesSynchronous Motor and Asynchronous MotorMOHANAKIRANANo ratings yet
- Robot Project Report RoboticsDocument34 pagesRobot Project Report Roboticsdcrust_amit82% (11)
- H-Bridge DC Motor Direction ControllerDocument7 pagesH-Bridge DC Motor Direction ControllerKhan ElmeNo ratings yet
- Arduino DC Motor Control Using L298N Motor DriverDocument3 pagesArduino DC Motor Control Using L298N Motor DriverSONA100% (1)
- Poster Ice Cinno Fahim A3Document1 pagePoster Ice Cinno Fahim A3inadirahNo ratings yet
- Advanced View Arduino Projects List - Use Arduino For ProjectsDocument49 pagesAdvanced View Arduino Projects List - Use Arduino For ProjectsBilal AfzalNo ratings yet
- Automatic Plant Watering SystemDocument6 pagesAutomatic Plant Watering SystemmahrukhNo ratings yet
- Arduino Project ListDocument50 pagesArduino Project ListAlia Khan100% (1)
- Top 200 Arduino Based Home Automation ProjectsDocument27 pagesTop 200 Arduino Based Home Automation Projectsduino4projectsNo ratings yet
- Arduino Soil Moisture SensorDocument5 pagesArduino Soil Moisture SensorGek CagatanNo ratings yet
- Arduino Ham RadioDocument18 pagesArduino Ham RadioAntony Burgers0% (1)
- Arduino BT Mobile Robot R2.0Document52 pagesArduino BT Mobile Robot R2.0Amir al-HakimNo ratings yet
- Arduino Projects List - About 2136 Arduino List of ProjectsDocument85 pagesArduino Projects List - About 2136 Arduino List of Projectsduino4projects100% (1)
- 25+ Creative Arduino Projects and Ideas For EngineersDocument20 pages25+ Creative Arduino Projects and Ideas For EngineersJacques Joseph100% (1)
- Kimax HD03WF Product User Manual Hd03wfDocument16 pagesKimax HD03WF Product User Manual Hd03wfdewasuryantoNo ratings yet
- Water Level Indicator Using Arduino & Ultrasonic Sensor - Circuit, ProgramDocument8 pagesWater Level Indicator Using Arduino & Ultrasonic Sensor - Circuit, ProgramdewasuryantoNo ratings yet
- Jurnal CovidDocument6 pagesJurnal CovidHanif MiftahNo ratings yet
- Distance Measurement Using Arduino Ultrasonic Sensor - Code & Circuit DiagramDocument6 pagesDistance Measurement Using Arduino Ultrasonic Sensor - Code & Circuit DiagramdewasuryantoNo ratings yet
- Water Level Controller Using Arduino. Water Level Indicator Using ArduinoDocument3 pagesWater Level Controller Using Arduino. Water Level Indicator Using Arduinodewasuryanto0% (1)
- Smart Blind Stick Project Using Arduino and SensorsDocument11 pagesSmart Blind Stick Project Using Arduino and SensorsdewasuryantoNo ratings yet
- Simple Ultrasonic Range Finder Using Arduino. Circuit Diagram, Program and TheoryDocument4 pagesSimple Ultrasonic Range Finder Using Arduino. Circuit Diagram, Program and Theorydewasuryanto100% (1)
- High-Range Wireless PowerDocument14 pagesHigh-Range Wireless PowerdewasuryantoNo ratings yet
- How To Build NiCd Battery Charger With Reverse Polarity ProtectionDocument1 pageHow To Build NiCd Battery Charger With Reverse Polarity ProtectiondewasuryantoNo ratings yet
- NiMh and NiCd Battery Charger Circuit Circuit Diagram and InstructionsDocument1 pageNiMh and NiCd Battery Charger Circuit Circuit Diagram and InstructionsdewasuryantoNo ratings yet
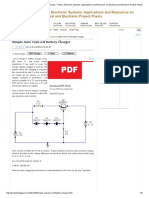
- Simple Auto Turn-Off Battery ChargerDocument5 pagesSimple Auto Turn-Off Battery ChargerdewasuryantoNo ratings yet
- Simple NiCd Battery ChargerDocument2 pagesSimple NiCd Battery Chargerdewasuryanto100% (1)
- Battery ChargerDocument5 pagesBattery ChargerdewasuryantoNo ratings yet
- K193 - Smart SLA Battery ChargerDocument3 pagesK193 - Smart SLA Battery ChargerdewasuryantoNo ratings yet
- 12V Gelled-Electrolyte Battery ChargerDocument2 pages12V Gelled-Electrolyte Battery ChargerdewasuryantoNo ratings yet
- Mains Slave Switcher - DIYDocument2 pagesMains Slave Switcher - DIYdewasuryantoNo ratings yet
- Automatic NiCd Battery Charger CircuitDocument2 pagesAutomatic NiCd Battery Charger CircuitdewasuryantoNo ratings yet
- Electronic Circuits, Transformerless Power Supply, LED Drivers, Battery Chargers, Solar Circuits - Automatic Simple 12V 100ma NiCd Battery Charger Circuit PDFDocument2 pagesElectronic Circuits, Transformerless Power Supply, LED Drivers, Battery Chargers, Solar Circuits - Automatic Simple 12V 100ma NiCd Battery Charger Circuit PDFdewasuryanto100% (1)
- Electronic Circuits, Transformerless Power Supply, LED Drivers, Battery Chargers, Solar Circuits - Automatic Simple 12V 100ma NiCd Battery Charger Circuit PDFDocument2 pagesElectronic Circuits, Transformerless Power Supply, LED Drivers, Battery Chargers, Solar Circuits - Automatic Simple 12V 100ma NiCd Battery Charger Circuit PDFdewasuryanto100% (1)
- Master Slave SwitcherDocument1 pageMaster Slave SwitcherdewasuryantoNo ratings yet
- Current Activated Switch - DIYWikiDocument5 pagesCurrent Activated Switch - DIYWikidewasuryantoNo ratings yet
- KUBE Electronics AG - Smart SwitchDocument2 pagesKUBE Electronics AG - Smart SwitchdewasuryantoNo ratings yet
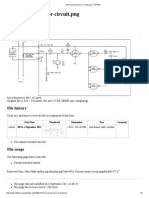
- File - Current Sensor Circuit - PNG DIYWikiDocument1 pageFile - Current Sensor Circuit - PNG DIYWikidewasuryanto100% (1)
- Automatic Switch For Voltage Converters Circuit DiagramDocument2 pagesAutomatic Switch For Voltage Converters Circuit DiagramdewasuryantoNo ratings yet
- Mains Slave TriacDocument2 pagesMains Slave Triacdewasuryanto100% (3)
- Building A Smart Master - Slave SwitchDocument4 pagesBuilding A Smart Master - Slave SwitchdewasuryantoNo ratings yet
- Automatic Load Sensing Power Switch - EEWeb CommunityDocument2 pagesAutomatic Load Sensing Power Switch - EEWeb CommunitydewasuryantoNo ratings yet
- Dimmer Circuit Using SCR - TRIACDocument10 pagesDimmer Circuit Using SCR - TRIACdewasuryantoNo ratings yet
- Kuliah Ante Natal Care DR Dhanasari UIDocument21 pagesKuliah Ante Natal Care DR Dhanasari UIdewasuryantoNo ratings yet
- Power Electronics CircuitsDocument1 pagePower Electronics CircuitsNandish IonNo ratings yet
- Vacuum Breadth First SearchDocument3 pagesVacuum Breadth First SearchNguyen HuyenNo ratings yet
- Gama 7400 ServiceManual R02Document104 pagesGama 7400 ServiceManual R02HrushikeshNo ratings yet
- PAS600L User GuideDocument136 pagesPAS600L User GuideDennis ManNo ratings yet
- EZ-USB FX1 - FX2LP Boot OptionsDocument17 pagesEZ-USB FX1 - FX2LP Boot OptionsJuan CarlosNo ratings yet
- 16 - Cisco IOS XR MPLS Operation and Implementation - Student Learning Guide v5.0 - Word-DPDocument50 pages16 - Cisco IOS XR MPLS Operation and Implementation - Student Learning Guide v5.0 - Word-DPDúber PérezNo ratings yet
- Huawei NE40 Router Config GuideDocument265 pagesHuawei NE40 Router Config Guidejopioug0% (1)
- Permintaan PCDocument4 pagesPermintaan PCdeny arya wiranataNo ratings yet
- Animal Forms ExerciseDocument3 pagesAnimal Forms ExerciseAbdallahNo ratings yet
- Debbuging Bootloader and Application Using KDSDocument32 pagesDebbuging Bootloader and Application Using KDSSantiago González FabiánNo ratings yet
- NUX Device Firmware Update Guide - EnglishDocument1 pageNUX Device Firmware Update Guide - EnglishAko BecerraNo ratings yet
- 30028Document16 pages30028Syed Nadeem AhmedNo ratings yet
- KRAMER TP-583T DatasheetDocument3 pagesKRAMER TP-583T DatasheetHilary JawaNo ratings yet
- La Mejor Guía de Microsoft TeamsDocument320 pagesLa Mejor Guía de Microsoft TeamsJohn NoseNo ratings yet
- Performance Task IN I.C.T 10: Calvin M. Almeda Grade 10-st. Basil The Great Mr. Jason ResurreccionDocument4 pagesPerformance Task IN I.C.T 10: Calvin M. Almeda Grade 10-st. Basil The Great Mr. Jason ResurreccionHannah TuazonNo ratings yet
- PDR - Unit IDocument16 pagesPDR - Unit IMUKILANNo ratings yet
- Commonly Asked MongoDB Interview Questions (2023) - InterviewbitDocument21 pagesCommonly Asked MongoDB Interview Questions (2023) - InterviewbitSagar ChaudhariNo ratings yet
- Future of DistributionDocument6 pagesFuture of DistributionPavan SinghNo ratings yet
- Ch-7 Device ManagementDocument71 pagesCh-7 Device ManagementAmna AtiqNo ratings yet
- DSA FinalDocument37 pagesDSA Final0 0No ratings yet
- Etrayz UserDocument119 pagesEtrayz UserplanetamenudoNo ratings yet
- IptrDocument1 pageIptrChen NuoNo ratings yet
- ROHR2Install e PDFDocument19 pagesROHR2Install e PDFxxNo ratings yet
- Adapt-Ptrc 2014 User ManualDocument188 pagesAdapt-Ptrc 2014 User ManualandreNo ratings yet
- Capitulo 3.2Document13 pagesCapitulo 3.2DASNo ratings yet
- Rural GSM Solutions Brief-V1-5Document2 pagesRural GSM Solutions Brief-V1-5Sriram IyerNo ratings yet
- SMARTPHONEDocument6 pagesSMARTPHONEMartinF9711No ratings yet
- Lab 10Document5 pagesLab 10Abdolkarim PahlianiNo ratings yet
- Electronics ResearchDocument3 pagesElectronics ResearchiamalminkoNo ratings yet
- macOS VPN Troubleshoot Guide - ENDocument21 pagesmacOS VPN Troubleshoot Guide - ENMcArthur2010No ratings yet