You might also like
- Notes 1 Working On A Terminal 4aug2022Document10 pagesNotes 1 Working On A Terminal 4aug2022jeremyNo ratings yet
- Notes 4 Basics of Python 25aug2022Document10 pagesNotes 4 Basics of Python 25aug2022jeremyNo ratings yet
- Notes 2 Working On A Terminal 11aug2022Document10 pagesNotes 2 Working On A Terminal 11aug2022jeremyNo ratings yet
- Solved Example: Qft-Ymp-12015Document2 pagesSolved Example: Qft-Ymp-12015jeremyNo ratings yet
- Solved Example: Qft-Ymp-12015Document2 pagesSolved Example: Qft-Ymp-12015jeremyNo ratings yet
- Notes - 3 - Basics - of - Python - Jupyter NotebookDocument6 pagesNotes - 3 - Basics - of - Python - Jupyter NotebookjeremyNo ratings yet
- Notes 5 Working With NumPy 1sep2022Document12 pagesNotes 5 Working With NumPy 1sep2022jeremyNo ratings yet
- Notes 1 Working With Terminal 4aug2022Document9 pagesNotes 1 Working With Terminal 4aug2022jeremyNo ratings yet
- Handbook Physics 18-Nov-2020Document90 pagesHandbook Physics 18-Nov-2020jeremyNo ratings yet
- PH434 Bash & Python scripts for terminal tasksDocument5 pagesPH434 Bash & Python scripts for terminal tasksjeremyNo ratings yet
- Feynman Rules in Quantum Electrodynamics: 20QFT Lessons in Field TheoryDocument10 pagesFeynman Rules in Quantum Electrodynamics: 20QFT Lessons in Field TheoryjeremyNo ratings yet
- Economics NotesDocument25 pagesEconomics NotesjeremyNo ratings yet
- Szilard EngineDocument7 pagesSzilard EngineAndresNo ratings yet
- 20QFT Lesson FeynmanRules PDFDocument5 pages20QFT Lesson FeynmanRules PDFjeremyNo ratings yet
- Short Examples: qft-xmp-12001Document3 pagesShort Examples: qft-xmp-12001jeremyNo ratings yet
- JEE Main Question Paper 03 - Set - VI - Mathematics - E - H - 8 (08042017)Document14 pagesJEE Main Question Paper 03 - Set - VI - Mathematics - E - H - 8 (08042017)Rohan SinghNo ratings yet
- Chennai Mathematical Physics Quantum Field Theory: Part Identifier Your Feed Back Remarks If AnyDocument2 pagesChennai Mathematical Physics Quantum Field Theory: Part Identifier Your Feed Back Remarks If AnyjeremyNo ratings yet
- Final Exam - QP - ECONOMICSDocument1 pageFinal Exam - QP - ECONOMICSjeremyNo ratings yet
- KVPY Results: Provisional List of Shortlisted Students for Interview 2016-17 Stream - SX (GN-OBCDocument42 pagesKVPY Results: Provisional List of Shortlisted Students for Interview 2016-17 Stream - SX (GN-OBCjeremyNo ratings yet
- Maxwell'S Demon, Szilard'S Engine and Quantum MeasurementsDocument9 pagesMaxwell'S Demon, Szilard'S Engine and Quantum MeasurementsjeremyNo ratings yet
- Paper by V. Jelic and F. MarsiglioDocument10 pagesPaper by V. Jelic and F. MarsiglioRavi RoyNo ratings yet
- 19me Quiz 06 PDFDocument4 pages19me Quiz 06 PDFjeremyNo ratings yet
- Newtonian Mechanics AssignmentDocument2 pagesNewtonian Mechanics AssignmentjeremyNo ratings yet
- ISC ChemistryDocument26 pagesISC ChemistryRenee ThephailNo ratings yet
- HW5Document2 pagesHW5jeremyNo ratings yet
- ISC Syllabus ContentsDocument6 pagesISC Syllabus ContentsDskNo ratings yet
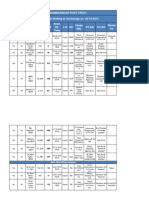
- V.O. Chidambaranar Port Trust Vessel Waiting at Anchorage On 03-10-2015Document2 pagesV.O. Chidambaranar Port Trust Vessel Waiting at Anchorage On 03-10-2015jeremyNo ratings yet
- ISC English PDFDocument3 pagesISC English PDFjeremyNo ratings yet
- JEE Main QP 20170409 PDFDocument15 pagesJEE Main QP 20170409 PDFjeremyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- USN 17MAT21: Model Question Paper With Effect From 2017-18Document3 pagesUSN 17MAT21: Model Question Paper With Effect From 2017-18VyshnaviNo ratings yet
- Mert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTDocument2 pagesMert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTOrkun AkyolNo ratings yet
- Vectors Notes IDocument14 pagesVectors Notes IJpricarioNo ratings yet
- Chapter2 17Document4 pagesChapter2 17myerraguNo ratings yet
- Chapt 7 - Trigonometry PDFDocument46 pagesChapt 7 - Trigonometry PDFNely JayNo ratings yet
- Boson Algebra As A Symplectic Clifford AlgebraDocument12 pagesBoson Algebra As A Symplectic Clifford AlgebraHong Shen LiuNo ratings yet
- NCERT Solutions for Class 12 Maths Chapter 5 Continuity and DifferentiabilityDocument115 pagesNCERT Solutions for Class 12 Maths Chapter 5 Continuity and DifferentiabilityManpreetKalsiNo ratings yet
- Gröbner Bases Tutorial OverviewDocument40 pagesGröbner Bases Tutorial OverviewAnonymous Tph9x741No ratings yet
- EE236C Conjugate FunctionsDocument16 pagesEE236C Conjugate FunctionshassanNo ratings yet
- s3s4 MathematicsDocument91 pagess3s4 MathematicsBKPNo ratings yet
- MatLab CodesDocument8 pagesMatLab CodesJoevelleBaflorNo ratings yet
- Cape Pure Mathσmatics Unit 1: Video Solutions are available atDocument191 pagesCape Pure Mathσmatics Unit 1: Video Solutions are available atJuan HaynesNo ratings yet
- Homework 7 - Solutions: G Be A Group of Order 55. G Is Generated by Two Elements X, Y, With The Relations X y Yxy X RDocument4 pagesHomework 7 - Solutions: G Be A Group of Order 55. G Is Generated by Two Elements X, Y, With The Relations X y Yxy X RSRDNo ratings yet
- Formulario Mate IV - M. PatlánDocument2 pagesFormulario Mate IV - M. PatlánKaren CardonaNo ratings yet
- Chapter2 Further Integration TechniquesDocument23 pagesChapter2 Further Integration TechniquesShaundre NeoNo ratings yet
- All ExercisesDocument35 pagesAll Exercisesmurilo_pugliesi1No ratings yet
- Lesson 1 - Complex NumbersDocument40 pagesLesson 1 - Complex Numberssuga linNo ratings yet
- Binomial Integral-Chebyshev's TheoremDocument14 pagesBinomial Integral-Chebyshev's TheoremČila NađNo ratings yet
- IT3305: Mathematics For Computing II (Compulsory) : BIT Year2 - Semester 3 - Detailed Syllabi IT3305Document6 pagesIT3305: Mathematics For Computing II (Compulsory) : BIT Year2 - Semester 3 - Detailed Syllabi IT3305Vanusha AdihettyNo ratings yet
- Solution Manual - Thomus' Calculus, 12th EditionDocument2 pagesSolution Manual - Thomus' Calculus, 12th EditionKaarthick RahulNo ratings yet
- Linear Convolution vs Circular Convolution in the DFTDocument4 pagesLinear Convolution vs Circular Convolution in the DFTa_alok25100% (1)
- PPP (Lesson 2)Document114 pagesPPP (Lesson 2)Gabriel RamosNo ratings yet
- Y X X X X: Hours by Arrangement and Exam 2 Practice Pt. 1 InstructionsDocument2 pagesY X X X X: Hours by Arrangement and Exam 2 Practice Pt. 1 Instructionsshiv shankarNo ratings yet
- Group TheoryDocument75 pagesGroup Theorynomikhanhhh0318No ratings yet
- Complex Integral Hand OutDocument7 pagesComplex Integral Hand OutPrabodaLakruwanRupanandaNo ratings yet
- Differential CalculusDocument4 pagesDifferential CalculusBILONG, KARYLLE KEITH, O.No ratings yet
- If You Don't Learn From Your Mistakes, There's No Sense of Making ThemDocument58 pagesIf You Don't Learn From Your Mistakes, There's No Sense of Making ThemCayetano, Tara Leigh MartinezNo ratings yet
- Matlab Quick ReferenceDocument12 pagesMatlab Quick Referencevahid100% (3)
- Resemblance (Kamukha) of The Graphs of Functions. Name It and What Graph It Looks LikeDocument3 pagesResemblance (Kamukha) of The Graphs of Functions. Name It and What Graph It Looks LikeRb bernan100% (1)
- Limits of Multivariable FunctionsDocument101 pagesLimits of Multivariable FunctionsAna MaciasNo ratings yet