You might also like
- Did The Past Economic Recovery Result in Shared Prosperity?Document33 pagesDid The Past Economic Recovery Result in Shared Prosperity?WDET 101.9 FMNo ratings yet
- Greens RecipeDocument2 pagesGreens RecipeWDET 101.9 FMNo ratings yet
- Mental Health Across The Criminal Legal ContinuumDocument24 pagesMental Health Across The Criminal Legal ContinuumWDET 101.9 FMNo ratings yet
- Residential Road Program Introduction 2019Document6 pagesResidential Road Program Introduction 2019WDET 101.9 FMNo ratings yet
- PFAS in Drinking WaterDocument2 pagesPFAS in Drinking WaterWDET 101.9 FMNo ratings yet
- Asian Carp Control MeasuresDocument2 pagesAsian Carp Control MeasuresWDET 101.9 FMNo ratings yet
- Algae Bloom Forecast 5/23/19Document1 pageAlgae Bloom Forecast 5/23/19WDET 101.9 FMNo ratings yet
- Bell Pepeprs RecipeDocument2 pagesBell Pepeprs RecipeWDET 101.9 FMNo ratings yet
- Lake Erie Harmful Algal Bloom Early ProjectionDocument1 pageLake Erie Harmful Algal Bloom Early ProjectionWDET 101.9 FMNo ratings yet
- 2019 Wayne County Road ScheduleDocument7 pages2019 Wayne County Road ScheduleWDET 101.9 FMNo ratings yet
- 2019 Combined BracketsDocument2 pages2019 Combined BracketsWDET 101.9 FMNo ratings yet
- Marathon Application and Variance RequestDocument43 pagesMarathon Application and Variance RequestWDET 101.9 FMNo ratings yet
- WDET's Preschool BallotDocument1 pageWDET's Preschool BallotWDET 101.9 FMNo ratings yet
- Infographic - Michigan School Finance at The Crossroads: A Quarter Century of State ControlDocument1 pageInfographic - Michigan School Finance at The Crossroads: A Quarter Century of State ControlWDET 101.9 FMNo ratings yet
- Lake Erie Bill of RightsDocument3 pagesLake Erie Bill of RightsWDET 101.9 FMNo ratings yet
- Patrick Colbeck DJC Interview TranscriptDocument14 pagesPatrick Colbeck DJC Interview TranscriptWDET 101.9 FMNo ratings yet
- Detroit Census MapDocument1 pageDetroit Census MapWDET 101.9 FMNo ratings yet
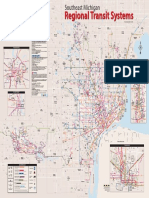
- 2014 Regional System MapDocument1 page2014 Regional System MapWDET 101.9 FMNo ratings yet
- Jim Hines DJC Interview TranscriptDocument15 pagesJim Hines DJC Interview TranscriptWDET 101.9 FMNo ratings yet
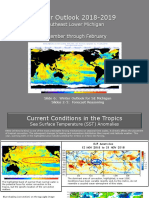
- Winter 2018-19 OutlookDocument6 pagesWinter 2018-19 OutlookWDET 101.9 FMNo ratings yet
- Black GarlicDocument2 pagesBlack GarlicWDET 101.9 FMNo ratings yet
- IRS Tax Reform Basics For Individuals 2018Document14 pagesIRS Tax Reform Basics For Individuals 2018WDET 101.9 FMNo ratings yet
- Pickled Summer SquashDocument2 pagesPickled Summer SquashWDET 101.9 FMNo ratings yet
- Shri Thanedar DJC Interview TranscriptDocument12 pagesShri Thanedar DJC Interview TranscriptWDET 101.9 FMNo ratings yet
- What's Fresh: Sweet Corn SoupDocument2 pagesWhat's Fresh: Sweet Corn SoupWDET 101.9 FMNo ratings yet
- Abdul El-Sayed DJC Interview TranscriptDocument18 pagesAbdul El-Sayed DJC Interview TranscriptWDET 101.9 FMNo ratings yet
- Gretchen Whitmer DJC Interview TranscriptDocument15 pagesGretchen Whitmer DJC Interview TranscriptWDET 101.9 FMNo ratings yet
- Brian Calley DJC Interview TranscriptDocument14 pagesBrian Calley DJC Interview TranscriptWDET 101.9 FMNo ratings yet
- Voters Not Politicians ProposalDocument8 pagesVoters Not Politicians ProposalWDET 101.9 FMNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- EXAM PREP: SAP Sales and Distribution CertificationDocument24 pagesEXAM PREP: SAP Sales and Distribution CertificationHanry KumalaNo ratings yet
- CD Lab FileDocument28 pagesCD Lab FileAyush MishraNo ratings yet
- SIPROTEC 7SX800 ProfileDocument2 pagesSIPROTEC 7SX800 ProfileHaris KhanNo ratings yet
- Set Up IP and Port Send SMS: Adminip123456 Ip Port Such As: Adminip123456 220.231.142.241 7700Document4 pagesSet Up IP and Port Send SMS: Adminip123456 Ip Port Such As: Adminip123456 220.231.142.241 7700Driff SedikNo ratings yet
- Info Tech Word AssignmentDocument9 pagesInfo Tech Word Assignmentnyasha gundaniNo ratings yet
- Communication System by BP Lathi PDFDocument2 pagesCommunication System by BP Lathi PDFPrinceNo ratings yet
- Yuzu Emulator Installer LogsDocument5 pagesYuzu Emulator Installer LogsMN GGNo ratings yet
- Notes On Counters (Digital Electronics)Document44 pagesNotes On Counters (Digital Electronics)wooDefyNo ratings yet
- Stage v3.0Document35 pagesStage v3.0Ben Torkia JaweherNo ratings yet
- Oluwaseun S. Ogunshola: Key SkillsDocument4 pagesOluwaseun S. Ogunshola: Key SkillsOluwaseun OgunsholaNo ratings yet
- Mcqss Project MNGMNTDocument18 pagesMcqss Project MNGMNTkhanNo ratings yet
- AXSWC Connections:: Axswc Vehicle Specific InstructionsDocument4 pagesAXSWC Connections:: Axswc Vehicle Specific InstructionsGilberto Ulisses Leon CarballoNo ratings yet
- Instagram-Flutter-Master DocumantationDocument6 pagesInstagram-Flutter-Master Documantationat3440951No ratings yet
- 2021 - A Review of Digital Twin in Product Design and DevelopmentDocument15 pages2021 - A Review of Digital Twin in Product Design and DevelopmentTAWHIDNo ratings yet
- SD WanDocument3 pagesSD Wanraditio ghifiardiNo ratings yet
- 10-5 Installing Software AG ProductsDocument91 pages10-5 Installing Software AG ProductsHicham ZaanounNo ratings yet
- Written Test PaperDocument12 pagesWritten Test PaperSrividhya RamakrishnanNo ratings yet
- DPR 1000 Manual PDFDocument45 pagesDPR 1000 Manual PDFedgarcoo100% (1)
- Mobile Computing Previous Papers by JNTUKDocument4 pagesMobile Computing Previous Papers by JNTUKKumara Raja JettiNo ratings yet
- RoBA MultiplierDocument3 pagesRoBA Multipliersai krishna boyapati100% (1)
- ReleaseNotes 5.11.02.217Document5 pagesReleaseNotes 5.11.02.217bartusdarNo ratings yet
- Automated Solar Panel Cleaning SystemDocument52 pagesAutomated Solar Panel Cleaning Systemakhil katariNo ratings yet
- HikCentral V1.6 - BrochureDocument24 pagesHikCentral V1.6 - BrochuredieterchNo ratings yet
- Advantage 2E Synon TutorialDocument442 pagesAdvantage 2E Synon Tutorialvanithaa123No ratings yet
- Download Byculla To Bangkok EpubDocument3 pagesDownload Byculla To Bangkok EpubSurajit MondalNo ratings yet
- Pavi Internship Report 2 PDFDocument55 pagesPavi Internship Report 2 PDFSuhas Naik100% (1)
- Survey ICS-2019 RadiflowDocument23 pagesSurvey ICS-2019 Radiflowabdel taibNo ratings yet
- MT 9 I7Document49 pagesMT 9 I7Michel MüllerNo ratings yet
- Unreal Engine 4 TutorialDocument52 pagesUnreal Engine 4 TutorialGiorgio D. BaraditNo ratings yet
- ETAP Power System Engineering Workshop 7 - 9 May 2013 - SingaporeDocument4 pagesETAP Power System Engineering Workshop 7 - 9 May 2013 - SingaporeSeanChanNo ratings yet