You might also like
- VCO Produces Positive and Negative Output Frequencies PDFDocument4 pagesVCO Produces Positive and Negative Output Frequencies PDFagmnm1962100% (1)
- Infrared Object CounterDocument9 pagesInfrared Object CounterMohideen NazimNo ratings yet
- Dielectric Properties of SolidsDocument15 pagesDielectric Properties of SolidsMahesh Lohith K.S100% (11)
- Design Energy Meter With PICDocument18 pagesDesign Energy Meter With PICapichanNo ratings yet
- Chapter 8 Data Acquisition and DistributionDocument18 pagesChapter 8 Data Acquisition and Distributionellyshacb-wp21No ratings yet
- DB PIKO-CI enDocument6 pagesDB PIKO-CI enMarko Maky ZivkovicNo ratings yet
- Vivekanand Education Society'S: Institute of TechnologyDocument9 pagesVivekanand Education Society'S: Institute of TechnologyFazle RahmanNo ratings yet
- Using Microcontrollers For High Accuracy Analogue MeasurementsDocument4 pagesUsing Microcontrollers For High Accuracy Analogue Measurementsacko085No ratings yet
- Designing Energy Meters With The PIC16F873A: Principles of MeasurementDocument29 pagesDesigning Energy Meters With The PIC16F873A: Principles of MeasurementMuhammad SohailNo ratings yet
- ADE7753Document60 pagesADE7753Marcus DouglasNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- Unit 4 Bxe NoteDocument17 pagesUnit 4 Bxe NotesameerNo ratings yet
- Design of Bipolar Signal IntegratorDocument4 pagesDesign of Bipolar Signal Integratorडाँ सूर्यदेव चौधरीNo ratings yet
- Step-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterDocument6 pagesStep-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterAMIR SOHAILNo ratings yet
- LCD Bias Power Reference Design With TPS61085: TI Designs: PMP9770 Reference GuideDocument11 pagesLCD Bias Power Reference Design With TPS61085: TI Designs: PMP9770 Reference GuidepeternewsNo ratings yet
- Implementation of A High Voltage Power SupplyDocument4 pagesImplementation of A High Voltage Power SupplyJiakeat LiauNo ratings yet
- An101a Appln Notes On CompDocument4 pagesAn101a Appln Notes On CompAditya K NNo ratings yet
- 3phase 3lelvel Didgital ControlDocument5 pages3phase 3lelvel Didgital ControlGp NAYAGRAH ELECTRICALNo ratings yet
- Dual Source Meter - EM9024Document21 pagesDual Source Meter - EM9024ilaaNo ratings yet
- Cir Ed 2003Document5 pagesCir Ed 2003Gunther HottNo ratings yet
- Ece3430 Lecture 18Document24 pagesEce3430 Lecture 18kuser5506No ratings yet
- Digital Pulse Processor Using A Moving Average TechniqueDocument3 pagesDigital Pulse Processor Using A Moving Average TechniqueHung Tran VietNo ratings yet
- Current Control and PWM Dimming in An Automotive LED Driver Based On A Uk ConverterDocument8 pagesCurrent Control and PWM Dimming in An Automotive LED Driver Based On A Uk Converter1730203No ratings yet
- Corporation: The Mathematics of Log-Based Dynamic ProcessorsDocument4 pagesCorporation: The Mathematics of Log-Based Dynamic ProcessorsSimone EgidiNo ratings yet
- Spit 47Document5 pagesSpit 47SaikrishnaNo ratings yet
- Operating Manual For: Dual Source MeterDocument23 pagesOperating Manual For: Dual Source MeterilaaNo ratings yet
- Digital Energy MeterDocument14 pagesDigital Energy MeterpvpriyaNo ratings yet
- 4 Direct Torque Control of Induction Motor Using SimulinkDocument6 pages4 Direct Torque Control of Induction Motor Using Simulinkapi-19508046No ratings yet
- DSP WT1819 Seminar 3 Solution PDFDocument4 pagesDSP WT1819 Seminar 3 Solution PDFTalal AhmadNo ratings yet
- Ask The Application Engineer-33 All About Direct Digital SynthesisDocument5 pagesAsk The Application Engineer-33 All About Direct Digital SynthesisleuteriosNo ratings yet
- Digital Measurement of Electrical QuantitiesDocument8 pagesDigital Measurement of Electrical QuantitiesMs. Bhavini KumawatNo ratings yet
- DDSD 285: Single Phase Multifunction Meter With Built in CommunicationDocument2 pagesDDSD 285: Single Phase Multifunction Meter With Built in CommunicationSameh FakhryNo ratings yet
- ECE3073 P7 Analogue AnswersDocument5 pagesECE3073 P7 Analogue AnswerskewancamNo ratings yet
- Expt No. 2 (B) Common Base AmplifierDocument11 pagesExpt No. 2 (B) Common Base Amplifierrani kumarNo ratings yet
- An 2557Document9 pagesAn 2557anonymous2018 decemberNo ratings yet
- 31 141 146 PDFDocument6 pages31 141 146 PDFlambanaveenNo ratings yet
- Mbed CH 4 v1Document15 pagesMbed CH 4 v1Brian YehNo ratings yet
- Ae Exp 9 To Design Monostable Multivibrators Using 555 IcDocument6 pagesAe Exp 9 To Design Monostable Multivibrators Using 555 IcPriyanshu KumawatNo ratings yet
- New Σ-Δ Voltage to Frequency Converter Analysis and ApplicationsDocument7 pagesNew Σ-Δ Voltage to Frequency Converter Analysis and ApplicationsGojko RatkovićNo ratings yet
- BAE0910 AN01 WattMeterDocument6 pagesBAE0910 AN01 WattMeterMatheus LopesNo ratings yet
- Application of Neural Network For Smart Control of A Buck DC/DC ConverterDocument4 pagesApplication of Neural Network For Smart Control of A Buck DC/DC ConverterHackbart100% (1)
- C. Instrumentation For Electrical Bioimpedance MeasurementsDocument32 pagesC. Instrumentation For Electrical Bioimpedance MeasurementsDmitriyNo ratings yet
- ADE7757 Analog DevicesDocument14 pagesADE7757 Analog DevicesKashif HassanNo ratings yet
- Microcontroller Applications Analog To Digital ConvertersDocument8 pagesMicrocontroller Applications Analog To Digital ConverterskaranNo ratings yet
- ADIC ExperimentsDocument41 pagesADIC ExperimentsTushar PatilNo ratings yet
- Design of Low Power Adc Using 0.18m Cmos Technology IJERTV3IS11173Document6 pagesDesign of Low Power Adc Using 0.18m Cmos Technology IJERTV3IS11173Rohan LoniNo ratings yet
- Description: Quick Start Guide For Demonstration Circuit 575 LTC2410Document5 pagesDescription: Quick Start Guide For Demonstration Circuit 575 LTC2410donatoNo ratings yet
- 05 LectureNotes 2019 S5Document18 pages05 LectureNotes 2019 S5Karan BhardwajNo ratings yet
- A Low-Power Decibel-Linear CMOS Automatiac Gain ControlDocument4 pagesA Low-Power Decibel-Linear CMOS Automatiac Gain ControlAlexandru StateNo ratings yet
- AD - AN406 7714 SigmaDocument12 pagesAD - AN406 7714 SigmaCarlos CorreiaNo ratings yet
- Fundamentals of RF Circuit Design - ch7Document14 pagesFundamentals of RF Circuit Design - ch7asarolicNo ratings yet
- Basic Calculation of A Buck Converter's Power Stage: Application ReportDocument8 pagesBasic Calculation of A Buck Converter's Power Stage: Application ReportAli KeyvanNo ratings yet
- Designing ADCDocument33 pagesDesigning ADCZulhelman HanafiNo ratings yet
- ADE7763Document57 pagesADE7763mailabautroixanh39No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Wattho 3 PDFDocument24 pagesWattho 3 PDFElneto CarriNo ratings yet
- Antenna Basic R&SDocument32 pagesAntenna Basic R&SKelvin AranaNo ratings yet
- Power Factor Correction HandBookDocument130 pagesPower Factor Correction HandBookJabir QuadriNo ratings yet
- User Manual 2428249Document10 pagesUser Manual 2428249Nikolay KasakovNo ratings yet
- Electronic Schematics Audio Devices1 PDFDocument250 pagesElectronic Schematics Audio Devices1 PDFElneto CarriNo ratings yet
- Engineer's Mini-Notebook PDFDocument52 pagesEngineer's Mini-Notebook PDFCarlos Ramos FernandezNo ratings yet
- Electronic Schematics Audio Devices1 PDFDocument250 pagesElectronic Schematics Audio Devices1 PDFElneto CarriNo ratings yet
- Engineering - (Ebook - PDF) - Lessons in Electronic Circuits I - DCDocument458 pagesEngineering - (Ebook - PDF) - Lessons in Electronic Circuits I - DCWhatAloser100% (7)
- En CD00201961 PDFDocument39 pagesEn CD00201961 PDFIrini Fountouli - LadopoulouNo ratings yet
- DC/AC Pure Sine Wave Inverter: NecamsidDocument57 pagesDC/AC Pure Sine Wave Inverter: NecamsidohjenNo ratings yet
- Homemade Isolation Transformer PDFDocument1 pageHomemade Isolation Transformer PDFElneto CarriNo ratings yet
- An-1095 International Rectifier LC FiltersDocument9 pagesAn-1095 International Rectifier LC FiltersElneto CarriNo ratings yet
- Op Amp Circuit Collection - National SemiconductorDocument33 pagesOp Amp Circuit Collection - National Semiconductorkok6No ratings yet
- VN3205N FetDocument4 pagesVN3205N FetElneto CarriNo ratings yet
- College of Technology & Engineering: Practical Training at Hindustan Zinc Limited Zinc Smelter, Debari UdaipurDocument24 pagesCollege of Technology & Engineering: Practical Training at Hindustan Zinc Limited Zinc Smelter, Debari UdaipurPooja SahuNo ratings yet
- PDC NitDocument6 pagesPDC NitrpshvjuNo ratings yet
- Projector Spec 8040Document1 pageProjector Spec 8040Radient MushfikNo ratings yet
- Lynx LX v8Document5 pagesLynx LX v8Bambang KaryantoNo ratings yet
- Lecture-7 - Line CodingDocument14 pagesLecture-7 - Line CodingFahim Hasan AlifNo ratings yet
- User's Manual HEIDENHAIN Conversational Format ITNC 530Document747 pagesUser's Manual HEIDENHAIN Conversational Format ITNC 530Mohamed Essam Mohamed100% (2)
- The Library of Babel - WikipediaDocument35 pagesThe Library of Babel - WikipediaNeethu JosephNo ratings yet
- Packages in JavaDocument4 pagesPackages in JavaKummeta KeerthiNo ratings yet
- Latihan Matematik DLP Minggu 1Document3 pagesLatihan Matematik DLP Minggu 1Unit Sains Komputer MRSM PendangNo ratings yet
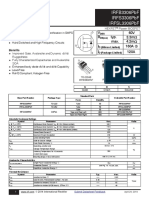
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADocument12 pagesIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNo ratings yet
- Simple Harmonic Oscillator: 1 HamiltonianDocument10 pagesSimple Harmonic Oscillator: 1 HamiltonianAbdurrahman imamNo ratings yet
- CHM170L Exp3 Surface TensionDocument5 pagesCHM170L Exp3 Surface TensionKaiser SaltoNo ratings yet
- Review Paper On Distributed ArchitectureDocument28 pagesReview Paper On Distributed ArchitectureWeb GuruNo ratings yet
- Infinera Ds Isfp Timedivision Multiplexing ModulesDocument3 pagesInfinera Ds Isfp Timedivision Multiplexing ModulesAnonymous bpf0OZSd9No ratings yet
- Atmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311Document14 pagesAtmel 2565 Using The Twi Module As I2c Slave - Applicationnote - Avr311m3y54mNo ratings yet
- OIML R 137-1 & 2: Nternational EcommendationDocument76 pagesOIML R 137-1 & 2: Nternational EcommendationAMY WEINo ratings yet
- Data and Specifications: HMR Regulated MotorsDocument21 pagesData and Specifications: HMR Regulated MotorsBeniamin KowollNo ratings yet
- Science BDocument2 pagesScience BIyer JuniorNo ratings yet
- NATCO Presentation - Desalters PDFDocument12 pagesNATCO Presentation - Desalters PDFshahmkamalNo ratings yet
- Oculus SDK OverviewDocument47 pagesOculus SDK OverviewparaqueimaNo ratings yet
- Optimizing AOD Refractory PerformanceDocument10 pagesOptimizing AOD Refractory PerformanceJulio PurezaNo ratings yet
- Chapter 19. TemperatureDocument41 pagesChapter 19. TemperatureNguyên Nguyễn SơnNo ratings yet
- RomerDocument20 pagesRomerAkistaaNo ratings yet
- Decision-Making Under Risk and Uncertainty: OutcomesDocument21 pagesDecision-Making Under Risk and Uncertainty: OutcomesprabodhNo ratings yet
- Exploring Music ContentsDocument370 pagesExploring Music ContentsRoby SamboraNo ratings yet
- Food Preparation, Terms and DefinitiosDocument2 pagesFood Preparation, Terms and DefinitiosLacsi, Erica Joy V.No ratings yet
- Hindu Temples Models of A Fractal Universe by Prof - Kriti TrivediDocument7 pagesHindu Temples Models of A Fractal Universe by Prof - Kriti TrivediAr ReshmaNo ratings yet
- Highway Design ProjectDocument70 pagesHighway Design ProjectmuhammedNo ratings yet