You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Wireless Power TransmissionDocument43 pagesWireless Power TransmissionSanjeet Kumar100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ge Electronics Components Hobby ManualDocument208 pagesGe Electronics Components Hobby ManualOswaldo TorresNo ratings yet
- Stages of Power SupplyDocument29 pagesStages of Power SupplyBerlin AlcaydeNo ratings yet
- PFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-EnDocument31 pagesPFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-Enkik020No ratings yet
- 3.fabrication of Electrical Power Generation Using Shock AbsorberDocument35 pages3.fabrication of Electrical Power Generation Using Shock AbsorberDinesh KumarNo ratings yet
- Design and Fabrication of Automatic Spray Painting MachineDocument44 pagesDesign and Fabrication of Automatic Spray Painting MachineDinesh Kumar100% (1)
- Design and Fabrication of Automatic Spray Painting MachineDocument44 pagesDesign and Fabrication of Automatic Spray Painting MachineDinesh Kumar100% (1)
- Eltek Flatpack enDocument10 pagesEltek Flatpack enZafar KhanNo ratings yet
- LNK 500Document20 pagesLNK 500jgau222No ratings yet
- Fabrication of Automated Drain Gutter Cleaner SystemDocument29 pagesFabrication of Automated Drain Gutter Cleaner SystemDinesh Kumar100% (2)
- Fabrication of Pneumatic Auto Feed Drilling MachineDocument46 pagesFabrication of Pneumatic Auto Feed Drilling MachineDinesh Kumar100% (2)
- 2.microcontroller Based Transformer Health Monitoring System Using IotDocument38 pages2.microcontroller Based Transformer Health Monitoring System Using IotDinesh KumarNo ratings yet
- Fabrication of Two Wheel Drive Forklift For IndustryDocument32 pagesFabrication of Two Wheel Drive Forklift For IndustryDinesh Kumar100% (1)
- Fabrication of 360 Angular Drilling MachineDocument28 pagesFabrication of 360 Angular Drilling MachineDinesh KumarNo ratings yet
- 11.fabrication of Hydralic Brake Shoe Riveting MachineDocument3 pages11.fabrication of Hydralic Brake Shoe Riveting MachineDinesh Kumar67% (3)
- Design and Fabrication of Four Way Hacksaw MachineDocument22 pagesDesign and Fabrication of Four Way Hacksaw MachineDinesh KumarNo ratings yet
- Een House Monitoring and Spray Water SystemDocument2 pagesEen House Monitoring and Spray Water SystemDinesh KumarNo ratings yet
- Machining ProcessingDocument20 pagesMachining ProcessingDinesh KumarNo ratings yet
- Major Project Report Reverse Braking SystemDocument41 pagesMajor Project Report Reverse Braking Systemgautamdb2078% (9)
- Hydraulic RevitingDocument29 pagesHydraulic RevitingDinesh KumarNo ratings yet
- Auto Indexing Gear Cutting Attachment For Pneumatic Shaping MachineDocument24 pagesAuto Indexing Gear Cutting Attachment For Pneumatic Shaping MachineDinesh Kumar100% (1)
- Fabrication of Automatic Pneumatic Paper Cup Making MachineDocument42 pagesFabrication of Automatic Pneumatic Paper Cup Making MachineDinesh Kumar80% (10)
- Analog Communication Systems: Dr. S. Muni RathnamDocument172 pagesAnalog Communication Systems: Dr. S. Muni RathnamsuryasitNo ratings yet
- BTS TRM External Alarms R3ADocument30 pagesBTS TRM External Alarms R3ARoxanne Lee Abellar Destor0% (1)
- ServiceManual H15Document93 pagesServiceManual H15MohamedNo ratings yet
- Electronics BSc..Document45 pagesElectronics BSc..Fida Ur RehmanNo ratings yet
- Evolution of Power Electronics Engineering PDFDocument7 pagesEvolution of Power Electronics Engineering PDFMahesh VadhavaniyaNo ratings yet
- Brake Rectifiers: Coil Voltage SelectionDocument2 pagesBrake Rectifiers: Coil Voltage SelectionGeoffrey PearmainNo ratings yet
- Simulation and Prototype Implementation of Phase Shift Full Bridge DC DC ConverterDocument4 pagesSimulation and Prototype Implementation of Phase Shift Full Bridge DC DC ConverterjimmyNo ratings yet
- 19 Analysis and Simulation of A Three Phase Shunt Active Power Filter With PQ Theory Control TDocument105 pages19 Analysis and Simulation of A Three Phase Shunt Active Power Filter With PQ Theory Control Tapi-19508046100% (1)
- Final Exam ECP483L1 1415 Set A ANSWERDocument4 pagesFinal Exam ECP483L1 1415 Set A ANSWERRonn Albert GabucayNo ratings yet
- Diodo 6A10Document3 pagesDiodo 6A10Giuseppe Francesco PilotNo ratings yet
- DLD ExamDocument25 pagesDLD ExamasdfsdrwearNo ratings yet
- Active RectifierDocument11 pagesActive RectifierMohan RajuNo ratings yet
- Project Report Front PageDocument8 pagesProject Report Front Pagejawalkar bharani kumarNo ratings yet
- Implementation of DSP Based Sinusoidal Pulse Width Modulation For Three Phase InverterDocument9 pagesImplementation of DSP Based Sinusoidal Pulse Width Modulation For Three Phase InverterIJSTE100% (1)
- Syllabus HDL BEDocument3 pagesSyllabus HDL BEPraveen AndrewNo ratings yet
- SEMIKRON DataSheet SKR 240 02 C ESPAG Welded Housing 02627741Document3 pagesSEMIKRON DataSheet SKR 240 02 C ESPAG Welded Housing 02627741M Usman ChaudharyNo ratings yet
- Laboratory 2 ReportDocument40 pagesLaboratory 2 ReportRn NatNo ratings yet
- Industrial Electronics and Control Third Edition by PAUL BISWANATHDocument2 pagesIndustrial Electronics and Control Third Edition by PAUL BISWANATHlinnaingeceNo ratings yet
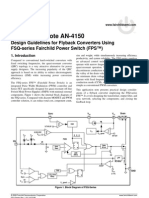
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- Eletronics Lab Report - Rectifier CircuitDocument4 pagesEletronics Lab Report - Rectifier CircuitThan Lwin Aung93% (14)
- SB5150 THRU SB5200: Schottky Barrier RectifierDocument2 pagesSB5150 THRU SB5200: Schottky Barrier RectifierCube7 GeronimoNo ratings yet
- Telwin PDFDocument24 pagesTelwin PDFmatjaz555No ratings yet
- Introduction To HV Experiments 110217Document45 pagesIntroduction To HV Experiments 110217Alexander FarezNo ratings yet
- S60SC4M ShindengenElectricMfg - Co.LtdDocument10 pagesS60SC4M ShindengenElectricMfg - Co.LtdBaharak BaghiNo ratings yet