You might also like
- Motorised Screw JackDocument4 pagesMotorised Screw JackhidaiNo ratings yet
- Git Best Practice & WorkflowDocument29 pagesGit Best Practice & WorkflowFraiza Geraldi AlghifaryNo ratings yet
- A Mobile Platform For Nursing Robot 1985Document14 pagesA Mobile Platform For Nursing Robot 1985mohsindalvi87No ratings yet
- Studio 5000 Logix Designer Advanced Lab ManualDocument216 pagesStudio 5000 Logix Designer Advanced Lab ManualClaudia Lara100% (4)
- Advances in Dynamometer TechnologyDocument17 pagesAdvances in Dynamometer Technologysalakhid100% (1)
- Monaco 5.10 Training GuideDocument1,194 pagesMonaco 5.10 Training GuideMircea Ciocaltei100% (1)
- Automated Robotic InspectionDocument6 pagesAutomated Robotic Inspectionprakush01975225403No ratings yet
- Software Requirement Specification 1Document16 pagesSoftware Requirement Specification 1ABbmcNo ratings yet
- Weigh BridgeDocument11 pagesWeigh BridgeDebajyoti SenNo ratings yet
- Full Scale Derailment Testes On Freight WagonsDocument19 pagesFull Scale Derailment Testes On Freight WagonsFelipe Campos100% (1)
- 3BSE041434-600 - H - en - 4 PDFDocument277 pages3BSE041434-600 - H - en - 4 PDFBuonQuaBuonQuaNo ratings yet
- Large Container Handling Systems-5Document5 pagesLarge Container Handling Systems-5Adn AdinaNo ratings yet
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 pagesCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanNo ratings yet
- Electronically Controlled Towing Bar Between Agricultural VehiclesDocument7 pagesElectronically Controlled Towing Bar Between Agricultural Vehiclesengineer86No ratings yet
- 1 - 77 - IJCAS - v.7 - n.1 - pp.113-122 - 2009 - Tamba-Hong-Hong (LIT)Document10 pages1 - 77 - IJCAS - v.7 - n.1 - pp.113-122 - 2009 - Tamba-Hong-Hong (LIT)Mudassir JafferNo ratings yet
- EJOR PrintingDocument8 pagesEJOR PrintingSaurabh PratapNo ratings yet
- Wheeled Robot For Geophysical SurveyDocument6 pagesWheeled Robot For Geophysical SurveyMili MeriNo ratings yet
- Auto Steer Farm Mlo96Document10 pagesAuto Steer Farm Mlo96rajeeseenivasanNo ratings yet
- Tracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorDocument7 pagesTracking Control of A Spot Bead Welding Mobile Robot Using Camera SensorViet Nguyen TrungNo ratings yet
- Avec02 PaperDocument7 pagesAvec02 PaperCristiano BeckNo ratings yet
- Blanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehicleDocument12 pagesBlanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehiclemaysamshNo ratings yet
- Systems Engineering Paper 2016 FinalDocument18 pagesSystems Engineering Paper 2016 Finalapi-301325631No ratings yet
- Author's Accepted Manuscript: Acta AstronauticaDocument22 pagesAuthor's Accepted Manuscript: Acta AstronauticaKaradiasNo ratings yet
- Highly Efficient AGV Transportation System Management Using Agent Cooperation and Container Storage PlanningDocument6 pagesHighly Efficient AGV Transportation System Management Using Agent Cooperation and Container Storage Planningyokito85No ratings yet
- Beei 2022.1Document8 pagesBeei 2022.1nttan.dhtd14a5hnNo ratings yet
- Cranes To Serve Ship in The Slip Ceres Paragon Terminal, AmsterdamDocument10 pagesCranes To Serve Ship in The Slip Ceres Paragon Terminal, Amsterdamthinh_vu5218No ratings yet
- Features and Working Principles: 2.1 Types of MachinesDocument33 pagesFeatures and Working Principles: 2.1 Types of Machinessp48888No ratings yet
- NavigationDocument17 pagesNavigationQuan NguyenNo ratings yet
- Obstacle Detection For Unmanned Ground Vehicles:: A Progress ReportDocument14 pagesObstacle Detection For Unmanned Ground Vehicles:: A Progress ReportPrasenjit SahaNo ratings yet
- Condition Monitoring of Railway Track Using In-Service VehicleDocument25 pagesCondition Monitoring of Railway Track Using In-Service VehiclenathiNo ratings yet
- A Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeDocument6 pagesA Design of High Efficient Gantry Crane For Ultra Large Container Ship Young Jin Lee, Jin Ho Suh, Jin Woo Lee, Suk Gyu Lee, and Kwon Soon LeeVictor Hugo ChoqueNo ratings yet
- Robotics and Automation Astrandal VigneshDocument2 pagesRobotics and Automation Astrandal VigneshVIGNESH L RNo ratings yet
- Get PDF 3Document4 pagesGet PDF 3Kavin Kumar JNo ratings yet
- P-047 Full PaperDocument7 pagesP-047 Full PapervdNo ratings yet
- Simulating Dispatching Strategies For Automated Container TerminalsDocument6 pagesSimulating Dispatching Strategies For Automated Container TerminalsAdn AdinaNo ratings yet
- 4023 Latam Hoist PDFDocument3 pages4023 Latam Hoist PDFFernando PardoNo ratings yet
- Prometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José TafurDocument4 pagesPrometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José TafurfrafagaNo ratings yet
- Automation & Speed Control of Transfer Car by Interfacing An Induction Motor Drive With Programmable Logic ControllerDocument11 pagesAutomation & Speed Control of Transfer Car by Interfacing An Induction Motor Drive With Programmable Logic ControllerYusuf MochtarNo ratings yet
- Crane Anti Collision DeviceDocument15 pagesCrane Anti Collision DeviceMohamedSaidNo ratings yet
- Unit 5Document12 pagesUnit 5GajananNo ratings yet
- Avionics: Prepared By: Akhil A Chandran Dept. of Aeronautical Engineering MvjceDocument28 pagesAvionics: Prepared By: Akhil A Chandran Dept. of Aeronautical Engineering MvjceNagaraja BhagavNo ratings yet
- A Study in Industrial Robot ProgrammingDocument26 pagesA Study in Industrial Robot ProgrammingPatel Dhaval100% (1)
- Robot Localization Using Relative and Absolute Position EstimatesDocument7 pagesRobot Localization Using Relative and Absolute Position Estimatesengineer86No ratings yet
- Internet of Things For Smart Ports: Technologies and ChallengesDocument10 pagesInternet of Things For Smart Ports: Technologies and Challengestatiane bilcatiNo ratings yet
- Vector Field Following For Quadrotors Using Differential FlatnessDocument6 pagesVector Field Following For Quadrotors Using Differential FlatnesswendersoncsdepNo ratings yet
- Applied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemDocument10 pagesApplied Sciences: A Computer Vision Based Conveyor Deviation Detection SystemWalid HalloucheNo ratings yet
- Avionics: Akhil A. Chandran Asst. Prof., Dept. of Aeronautical Engg. MvjceDocument28 pagesAvionics: Akhil A. Chandran Asst. Prof., Dept. of Aeronautical Engg. MvjceNagaraja BhagavNo ratings yet
- Trajectory Tracking Control and Robustness Analysis of A Robotic Manipulator Using Advanced Control TechniquesDocument13 pagesTrajectory Tracking Control and Robustness Analysis of A Robotic Manipulator Using Advanced Control Techniques李默然No ratings yet
- Data AquisationDocument11 pagesData Aquisationengineair007No ratings yet
- Application Note #3416: A Brief Overview of Coordinate TransformationDocument12 pagesApplication Note #3416: A Brief Overview of Coordinate TransformationKavya M BhatNo ratings yet
- Standard Operating Procedure-Mobile - Crane PDFDocument15 pagesStandard Operating Procedure-Mobile - Crane PDFRam KrishnaNo ratings yet
- Edited TOPS Crane OperationDocument15 pagesEdited TOPS Crane Operationanon_106345234No ratings yet
- Robust Trajectory Tracking Error Model-Based Predictive Control For Unmanned Ground VehiclesDocument9 pagesRobust Trajectory Tracking Error Model-Based Predictive Control For Unmanned Ground VehiclesModa MetanoiaNo ratings yet
- Pneumatic SystemDocument18 pagesPneumatic SystemsadyehclenNo ratings yet
- CAD/CAM/CIMDocument11 pagesCAD/CAM/CIMNPMYS23No ratings yet
- JujnovichCebon 8ISHVWDDocument16 pagesJujnovichCebon 8ISHVWDeyya 007No ratings yet
- Railway Monitoring System PDFDocument12 pagesRailway Monitoring System PDFSanjana Singh100% (1)
- Isystem Hardware: Robotics: Screen 1Document9 pagesIsystem Hardware: Robotics: Screen 1Francisco Rodriguez CozarNo ratings yet
- Aligning Overhead Crane Rails - HOIST MagazineDocument3 pagesAligning Overhead Crane Rails - HOIST MagazineDaniel ConwayNo ratings yet
- NDT2012 2a2 PDFDocument12 pagesNDT2012 2a2 PDFIvan MauricioNo ratings yet
- 3 Nejad Et Al-LibreDocument10 pages3 Nejad Et Al-LibreEsthi KusumaNo ratings yet
- Mooring Chain Climbing Robot For NDT Inspection ApplicationsDocument9 pagesMooring Chain Climbing Robot For NDT Inspection ApplicationsSoledad AceitunoNo ratings yet
- 80 120 Kva PDFDocument81 pages80 120 Kva PDFBuonQuaBuonQuaNo ratings yet
- 3BUA000500 en V SystDocument24 pages3BUA000500 en V SystBuonQuaBuonQuaNo ratings yet
- 4-hp Separator PDFDocument1 page4-hp Separator PDFBuonQuaBuonQuaNo ratings yet
- 25-Gas Export Compressor Suction ScrubberDocument1 page25-Gas Export Compressor Suction ScrubberBuonQuaBuonQuaNo ratings yet
- 2-Production & Test ManifoldsDocument1 page2-Production & Test ManifoldsBuonQuaBuonQuaNo ratings yet
- Loop TextDocument55 pagesLoop TextBuonQuaBuonQuaNo ratings yet
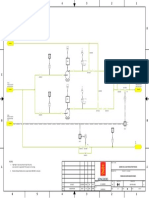
- Generic Oil & Gas Production ProcessDocument1 pageGeneric Oil & Gas Production ProcessBuonQuaBuonQuaNo ratings yet
- 21-Glycol Regeneration Package (Sheet 3)Document1 page21-Glycol Regeneration Package (Sheet 3)BuonQuaBuonQuaNo ratings yet
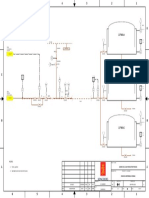
- Generic Oil & Gas Production ProcessDocument1 pageGeneric Oil & Gas Production ProcessBuonQuaBuonQuaNo ratings yet
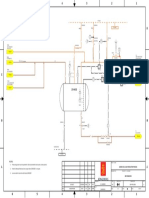
- Generic Oil & Gas Production Process Notes:: Fb/LoDocument1 pageGeneric Oil & Gas Production Process Notes:: Fb/LoBuonQuaBuonQuaNo ratings yet
- Decision Rules - Pega SystemDocument11 pagesDecision Rules - Pega SystemSukumar DasNo ratings yet
- Blood Donation ApplicationDocument5 pagesBlood Donation ApplicationIJRASETPublicationsNo ratings yet
- Part2 5548C E60-E200 FunctDocument111 pagesPart2 5548C E60-E200 FuncterbiliNo ratings yet
- 16.1.4 Lab - Implement GRE Over IPsec Site-To-Site VPNs - ILMDocument33 pages16.1.4 Lab - Implement GRE Over IPsec Site-To-Site VPNs - ILMAndrei Petru PârvNo ratings yet
- BM3 Pos Machine Installation DoucmentDocument14 pagesBM3 Pos Machine Installation Doucmentarjun singhNo ratings yet
- Psycho-Uber: 1A: Initial AnalysisDocument7 pagesPsycho-Uber: 1A: Initial AnalysisassdasaNo ratings yet
- CA Disk Backup and RestoreDocument2 pagesCA Disk Backup and RestoreAiy AriNo ratings yet
- Rick Borstein's 30 Top Tricks For Acrobat 9Document11 pagesRick Borstein's 30 Top Tricks For Acrobat 9Bowayne HewetsonNo ratings yet
- Digital Clock With Visitor CounterDocument52 pagesDigital Clock With Visitor Countermuddassir07100% (1)
- RG8000 Installation and Support With SparrowDocument1 pageRG8000 Installation and Support With SparrowSanthosh KumarNo ratings yet
- Excel CRM TemplateDocument6 pagesExcel CRM TemplateFajar TobingNo ratings yet
- Ipinfusion Company Interview Questions Asked at 5 Years ExperienceDocument4 pagesIpinfusion Company Interview Questions Asked at 5 Years ExperienceAnjani Kumar RaiNo ratings yet
- Topic: Records Management: LIS 111 Introduction To Records Mgt. and ArchivesDocument4 pagesTopic: Records Management: LIS 111 Introduction To Records Mgt. and ArchivesMitzi Portia VillanuevaNo ratings yet
- LED Lamp FYP ReportDocument97 pagesLED Lamp FYP ReportSidra ShaikhNo ratings yet
- UDF & Powercopy of CATIA V5: About COE Membership Industries Events Content Center Partners ForumsDocument13 pagesUDF & Powercopy of CATIA V5: About COE Membership Industries Events Content Center Partners ForumsRedondela DentalNo ratings yet
- GO16WDCH10GRADER10FAS - Employment 11 InstructionsDocument2 pagesGO16WDCH10GRADER10FAS - Employment 11 InstructionsSATNAM SINGHNo ratings yet
- Bear Hunt FlashcardsDocument9 pagesBear Hunt FlashcardsceciliaNo ratings yet
- Disk Speed Test ManualDocument78 pagesDisk Speed Test ManualKarl Si AkoNo ratings yet
- How Do You Use Scripts To Dynamize Objects in WinCC Comfort and WinCC Advanced? - ID: 53752382 - Industry Support SiemensDocument5 pagesHow Do You Use Scripts To Dynamize Objects in WinCC Comfort and WinCC Advanced? - ID: 53752382 - Industry Support SiemensAhmed AwadhNo ratings yet
- RUCKUS H550 Data SheetDocument6 pagesRUCKUS H550 Data SheetMarceloNo ratings yet
- Red Hat Developer Toolset-4-4.0 Release Notes-En-USDocument20 pagesRed Hat Developer Toolset-4-4.0 Release Notes-En-USeusphorusNo ratings yet
- OOP Lecture 3Document17 pagesOOP Lecture 3shahzaibsadiq8855No ratings yet
- 75F Modbus Integration PDFDocument5 pages75F Modbus Integration PDFmohamad chaudhariNo ratings yet
- ELab Skill TrainingDocument3 pagesELab Skill TrainingS-KarthikNo ratings yet
- TESPBEATIBRIDKDocument3 pagesTESPBEATIBRIDKAnton ZhyrkovNo ratings yet
- Experiment-1: OBJECTIVE: Running and Using Services/commands Like 1.ping CommandDocument17 pagesExperiment-1: OBJECTIVE: Running and Using Services/commands Like 1.ping Commandvishal aggarwalNo ratings yet