You might also like
- EM Lecture Notes Chapter 7 GriffithsDocument18 pagesEM Lecture Notes Chapter 7 Griffiths005235No ratings yet
- EM Lecture Notes Chapter 5 GriffithsDocument21 pagesEM Lecture Notes Chapter 5 Griffiths005235100% (2)
- EM Lecture Notes Chapter 2 GriffithsDocument43 pagesEM Lecture Notes Chapter 2 Griffiths005235100% (2)
- EM LectureNotesChapter3 GriffithsDocument53 pagesEM LectureNotesChapter3 Griffiths005235No ratings yet
- EM Lecture Notes Chapter 4 GriffithsDocument37 pagesEM Lecture Notes Chapter 4 Griffiths005235No ratings yet
- BITSAT Question BankDocument17 pagesBITSAT Question Bankaayushjain_ajNo ratings yet
- Electrostatics CH2 Part - 2Document24 pagesElectrostatics CH2 Part - 2Rishab SharmaNo ratings yet
- Chapter 2. Griffiths-Electrostatics-2.3 (1) - DikonversiDocument10 pagesChapter 2. Griffiths-Electrostatics-2.3 (1) - DikonversiBilhan Rudi siagianNo ratings yet
- (ECE 401) Lecture 2 Vector Analysis - Part 1Document34 pages(ECE 401) Lecture 2 Vector Analysis - Part 1Johnjoseph VeraNo ratings yet
- Chapter 1. Griffiths-Vector Analysis - 1.1 1.2Document24 pagesChapter 1. Griffiths-Vector Analysis - 1.1 1.2Hazem TawfikNo ratings yet
- Del Operator and TheoremsDocument29 pagesDel Operator and TheoremsAdarsh RajNo ratings yet
- Engineering Physics NotesDocument69 pagesEngineering Physics NotesSaipavan Seelamsetty86% (7)
- Classical Mechanics IIT Jam Practice PaperDocument4 pagesClassical Mechanics IIT Jam Practice PapershivanandNo ratings yet
- Vicker Hardness TesterDocument4 pagesVicker Hardness TesterVijayakumar mNo ratings yet
- Engineering Physics Notes PDFDocument242 pagesEngineering Physics Notes PDFpostmanZZNo ratings yet
- Mathematical Physics Sample Exam 1Document5 pagesMathematical Physics Sample Exam 1Perry EsguerraNo ratings yet
- Solved - Chapter 11.1 Problem 15P Solution - Advanced Engineering Mathematics, Enhanced EText 10th EditionDocument2 pagesSolved - Chapter 11.1 Problem 15P Solution - Advanced Engineering Mathematics, Enhanced EText 10th EditionFaris zulkarnain100% (1)
- CH 8. Plane Electromagnetic Waves: Chap 8.1 8.3Document23 pagesCH 8. Plane Electromagnetic Waves: Chap 8.1 8.3Madhav patilNo ratings yet
- Phy Kinetic Theory of GasesDocument16 pagesPhy Kinetic Theory of GasesSachinNo ratings yet
- Plus One Physics Previous Question PaperDocument44 pagesPlus One Physics Previous Question Papersidharth7manoj75% (4)
- Polytechnic Physics TRB Reference BooksDocument3 pagesPolytechnic Physics TRB Reference BooksJagan EashwarNo ratings yet
- Bloch TheoremDocument12 pagesBloch TheoremAhsan MoinNo ratings yet
- Electrostatics Notes JEE Main and AdvancedDocument55 pagesElectrostatics Notes JEE Main and AdvancedHitesh Bhatia100% (2)
- Narayana Phase-I JEE-Main GTM-7 Final Q'PaperDocument22 pagesNarayana Phase-I JEE-Main GTM-7 Final Q'PaperShrenik Jain100% (1)
- Modern Physics Complete NotesDocument29 pagesModern Physics Complete NotesRavi JanakiramanNo ratings yet
- Applied Physics-Unit 1 Wave OpticsDocument17 pagesApplied Physics-Unit 1 Wave Opticsshoyab gourNo ratings yet
- J-970 Basic Circuit Analysis PDFDocument1 pageJ-970 Basic Circuit Analysis PDFbasab0% (1)
- Rotational Motion (Practice Questions)Document46 pagesRotational Motion (Practice Questions)SakshamNo ratings yet
- Quantum Mechanics-I Previous Year Question Papers (MSC Physics Delhi University)Document2 pagesQuantum Mechanics-I Previous Year Question Papers (MSC Physics Delhi University)Neerav Kumar0% (2)
- Array QuestionsDocument28 pagesArray QuestionsnavNo ratings yet
- 4.1.unit-4 - Band Theory of Solids - ECE-2 and 3Document16 pages4.1.unit-4 - Band Theory of Solids - ECE-2 and 3Eswar NandamNo ratings yet
- Gate 2019 PhysicsDocument34 pagesGate 2019 PhysicsAritri RoyNo ratings yet
- Motion in A PlaneDocument3 pagesMotion in A PlanePilotsaicharan AirbusNo ratings yet
- Important Questions - Electromagnetic WavesDocument4 pagesImportant Questions - Electromagnetic WavesswadhinNo ratings yet
- Kirk EffectDocument3 pagesKirk EffectMohaned Elemam ElshawyNo ratings yet
- 8.work Function of MetalDocument3 pages8.work Function of MetalRavi Kanth M NNo ratings yet
- Vector Calculus Applications in Electricity and MagnetismDocument6 pagesVector Calculus Applications in Electricity and MagnetismSadeep MadhushanNo ratings yet
- ElectrostaticDocument39 pagesElectrostaticSANCHIT BAWEJA100% (1)
- Iit PaceDocument19 pagesIit PaceabhishekjanjalkarNo ratings yet
- CBSE Previous Year Question Papers Class 12 Physics Outside Set 1 2017 PDFDocument24 pagesCBSE Previous Year Question Papers Class 12 Physics Outside Set 1 2017 PDFashok pradhanNo ratings yet
- 12M 27 3D Geometry PDFDocument61 pages12M 27 3D Geometry PDFsihg Jaiswal100% (1)
- Linear Algebra Notes PDFDocument3 pagesLinear Algebra Notes PDFJOhnNo ratings yet
- UCVTS AIT PhysicsDocument15 pagesUCVTS AIT PhysicsArsalan Ahmed Usmani100% (1)
- Excitation of Waveguides PozarDocument11 pagesExcitation of Waveguides PozarthgnguyenNo ratings yet
- IIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDocument4 pagesIIT JEE Physics Free Notes: Mechanics - Vectors and ScalarsDr.Balakrishnan Kishore67% (3)
- DYNAMICS QUESTIONS For JEEDocument25 pagesDYNAMICS QUESTIONS For JEEAdarsh DhawanNo ratings yet
- Final Tufree Mechanics 2.2558Document32 pagesFinal Tufree Mechanics 2.2558Euw Chaiwanont0% (3)
- Drift and Diffusion CurrentsDocument6 pagesDrift and Diffusion Currentsprabhat_prem50% (4)
- Physics - Tufree MidtermDocument15 pagesPhysics - Tufree MidtermEuw ChaiwanontNo ratings yet
- 01-Ray Optics MMDocument81 pages01-Ray Optics MMSarvesh Kumar Singh100% (3)
- Vectors 1Document2 pagesVectors 1Gaurav Mittal0% (1)
- A Fortran 90 Program To Solve A Set of Linear Equations by UsingDocument3 pagesA Fortran 90 Program To Solve A Set of Linear Equations by Usingnadher albaghdadiNo ratings yet
- 1 Relativity - Physics NotesDocument67 pages1 Relativity - Physics NotesAmit KumarNo ratings yet
- Lec 028Document5 pagesLec 028SaranyaNo ratings yet
- Vol 4 No 5 Page 526 To 530Document5 pagesVol 4 No 5 Page 526 To 530shridharNo ratings yet
- Emt 3Document25 pagesEmt 3Shubham KumarNo ratings yet
- 16 - GR (Magnetic Effects of Current) - EngDocument8 pages16 - GR (Magnetic Effects of Current) - Engsarthak8340196165rajNo ratings yet
- Asd2ddfghk PDFDocument28 pagesAsd2ddfghk PDFsriNo ratings yet
- QMLect 4 Probs SOLNDocument4 pagesQMLect 4 Probs SOLNMark EichenlaubNo ratings yet
- Questions and Problems in School Physics TARASOVDocument236 pagesQuestions and Problems in School Physics TARASOV005235No ratings yet
- Motion of Charged Particles in Fields: 2.1 Uniform B Field, E 0Document23 pagesMotion of Charged Particles in Fields: 2.1 Uniform B Field, E 0Jorge OviedoNo ratings yet
- Plasma Physics Lecture 5 Ian HutchinsonDocument49 pagesPlasma Physics Lecture 5 Ian Hutchinson005235No ratings yet
- Plasma Physics Lecture 4 Ian HutchinsonDocument32 pagesPlasma Physics Lecture 4 Ian Hutchinson005235No ratings yet
- Chap 1Document11 pagesChap 1Lui Txai Calvoso HablNo ratings yet
- Thesis LetterDocument218 pagesThesis Lettervnikov101No ratings yet
- Quantum Mechanics ReviewDocument239 pagesQuantum Mechanics Review005235100% (1)
- Statistical Mechanics Lecture Notes James Binney OxfordDocument37 pagesStatistical Mechanics Lecture Notes James Binney Oxford005235No ratings yet
- Elementary Topology Problem TextbookDocument415 pagesElementary Topology Problem TextbookNolberto Garcia ReyesNo ratings yet
- Safety, Diode Lasers, HeNe Lasers, Drive, Info, PartsDocument130 pagesSafety, Diode Lasers, HeNe Lasers, Drive, Info, Partsmechanix60No ratings yet
- 2009 CE Physics Marking SchemeDocument8 pages2009 CE Physics Marking SchemeChoi FungNo ratings yet
- Newton's Third LawDocument69 pagesNewton's Third LawJhen IvyNo ratings yet
- ACTIVITY - Plane Mirror & Laws of ReflectionDocument1 pageACTIVITY - Plane Mirror & Laws of ReflectionJOHN CARLO ASTILLA33% (3)
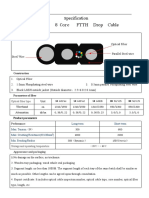
- Gjyxch 8 Core FTTH Drop Cable: PecificationDocument2 pagesGjyxch 8 Core FTTH Drop Cable: PecificationluiggiNo ratings yet
- Lesson 1Document91 pagesLesson 1Phuong HungNo ratings yet
- Determination of Grating ConstantDocument8 pagesDetermination of Grating ConstantAdrienne CruzNo ratings yet
- Today's Agenda: Review of Waves. Young's Double Slit ExperimentDocument9 pagesToday's Agenda: Review of Waves. Young's Double Slit ExperimentMiv SisNo ratings yet
- Basic of Doppler UltrasoundDocument25 pagesBasic of Doppler Ultrasoundpepsimax85No ratings yet
- 2 7Document8 pages2 7Christina RaggioNo ratings yet
- History of AstronomyDocument42 pagesHistory of AstronomySei Jane Rumbaoa Marquez100% (4)
- Zeiss OPMI Lumera T - User ManualDocument270 pagesZeiss OPMI Lumera T - User ManualPhilip McNelson100% (5)
- Govt. Pilot High School Rawalakot AJK Pre-Board ExamDocument1 pageGovt. Pilot High School Rawalakot AJK Pre-Board ExamAbdul qadeerNo ratings yet
- Virtual Retinal VRDDocument14 pagesVirtual Retinal VRDpreethinarmiNo ratings yet
- D'Alembert's MechanicsDocument1 pageD'Alembert's MechanicsridwanphyNo ratings yet
- Mechanics Sec02 Full Notes02Document1 pageMechanics Sec02 Full Notes02Priyadarshi MNo ratings yet
- The Universe: Glocielle F. Molabola Department of Biology College of Science Polytechnic University of The PhilippinesDocument16 pagesThe Universe: Glocielle F. Molabola Department of Biology College of Science Polytechnic University of The PhilippinesPaul Symon CrisostomoNo ratings yet
- Electrons Matter Interaction PDFDocument18 pagesElectrons Matter Interaction PDFAbhilash VermaNo ratings yet
- Basic Principles of X-Ray Reflectivity in Thin Films - Felix Jimenez-Villacorta (Compatibility Mode) PDFDocument12 pagesBasic Principles of X-Ray Reflectivity in Thin Films - Felix Jimenez-Villacorta (Compatibility Mode) PDFArup KuntiNo ratings yet
- Photonic CrystalDocument171 pagesPhotonic CrystalSHYAM M 32No ratings yet
- Aieee-2012 Physics SolutionsDocument5 pagesAieee-2012 Physics SolutionsAman Bhutta100% (1)
- Sample Exam Papers: National University of Singapore Nanyang Technological UniversityDocument152 pagesSample Exam Papers: National University of Singapore Nanyang Technological UniversityHuongNo ratings yet
- Engineering Physics (14BT1BS01)Document4 pagesEngineering Physics (14BT1BS01)Pavan KumarNo ratings yet
- Yearly Lesson Plan Physics Form 4 Year 2012Document15 pagesYearly Lesson Plan Physics Form 4 Year 2012khoirwNo ratings yet
- Magnetism NotesDocument19 pagesMagnetism NotesAnonymous JM62lPsJYp100% (2)
- Canon Bell&howell FXDocument50 pagesCanon Bell&howell FXBill Chan ChandlerNo ratings yet
- Faraday's Experiment: Objective: Induce Current in A Wire With A MagnetDocument1 pageFaraday's Experiment: Objective: Induce Current in A Wire With A MagnetAnahita SinghNo ratings yet
- Ampere's Law MC Questions PDFDocument6 pagesAmpere's Law MC Questions PDFLynn Hollenbeck Breindel0% (1)
- Geometrical OpticsDocument76 pagesGeometrical OpticsnehnegNo ratings yet
- Lesson 1 - Image Formation in LensesDocument4 pagesLesson 1 - Image Formation in LensesRhian PanaganeNo ratings yet