You might also like
- Aircraft Trajectory Planning With Collision Avoidance Using Mixed Integer Linear Programming, ACC.2002.1023918Document6 pagesAircraft Trajectory Planning With Collision Avoidance Using Mixed Integer Linear Programming, ACC.2002.1023918Mehmed BrkićNo ratings yet
- ITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsDocument18 pagesITTC - Recommended Procedures and Guidelines: Practical Guidelines For Ship CFD ApplicationsHamed HmNo ratings yet
- Aerodynamics and Flight Control Design For Hovering Micro Air VehiclesDocument3 pagesAerodynamics and Flight Control Design For Hovering Micro Air VehiclesRitesh SinghNo ratings yet
- Optimization of Low Speed Airfoils Using MathlabDocument64 pagesOptimization of Low Speed Airfoils Using Mathlabsamy90_xNo ratings yet
- AUV Topics and TitleDocument2 pagesAUV Topics and TitleShivuShivaNo ratings yet
- A Parallel Implicit in Compressible FlowDocument33 pagesA Parallel Implicit in Compressible FlowRituraj GautamNo ratings yet
- Preliminary Radial Flow TurbineDocument10 pagesPreliminary Radial Flow Turbinejr110livecomNo ratings yet
- Computational Model and Solver SetupDocument11 pagesComputational Model and Solver SetupaunbhuttaNo ratings yet
- EpplerDocument5 pagesEpplersumon1314No ratings yet
- Multi-Objective Optimization of A Hypersonic Inlet Using Generalized Outflow Boundary Conditions in The Continuous Adjoint MethodDocument25 pagesMulti-Objective Optimization of A Hypersonic Inlet Using Generalized Outflow Boundary Conditions in The Continuous Adjoint MethodVidushee GeetamNo ratings yet
- Etude de Cas STX Coque PDFDocument8 pagesEtude de Cas STX Coque PDFGraham WestbrookNo ratings yet
- Prioritized Control Allocation For Quadrotors Subject To SaturationDocument7 pagesPrioritized Control Allocation For Quadrotors Subject To SaturationARTH PATELNo ratings yet
- Analysis of Aircraft Sortie Generation With The Use of A Fork-Join Queueing Network ModeDocument12 pagesAnalysis of Aircraft Sortie Generation With The Use of A Fork-Join Queueing Network Mode오승헌 / 학생 / 조선해양공학과No ratings yet
- Literature Review20Document52 pagesLiterature Review20roshan212001No ratings yet
- Mooring Line Management SNAME 1994Document8 pagesMooring Line Management SNAME 1994Peyman MznNo ratings yet
- PresentaionDocument12 pagesPresentaionMidhun MvNo ratings yet
- Comparative Investigation of VLM Codes For Joined-WingDocument5 pagesComparative Investigation of VLM Codes For Joined-WingInternational Journal of Research in Engineering and TechnologyNo ratings yet
- A Report On The Papers Presented On High Lift Airfoil SectionsDocument36 pagesA Report On The Papers Presented On High Lift Airfoil SectionsRaja Shekar KalashikamNo ratings yet
- CFD in The Marine IndustryDocument12 pagesCFD in The Marine IndustryMarian LazarNo ratings yet
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliNo ratings yet
- Virtual Maneuvering Test in CFD Media in Presence of Free SurfaceDocument19 pagesVirtual Maneuvering Test in CFD Media in Presence of Free SurfaceAhmad HajivandNo ratings yet
- Race Driver ModelDocument14 pagesRace Driver ModelAndrea Fontana100% (1)
- (IJCST-V5I2P92) :dabbiru Ravi VikranthDocument5 pages(IJCST-V5I2P92) :dabbiru Ravi VikranthEighthSenseGroupNo ratings yet
- Halbe 2010 (Control)Document42 pagesHalbe 2010 (Control)vicente acostaNo ratings yet
- Use of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning BoatsDocument9 pagesUse of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning Boatsgnd100No ratings yet
- Yeo StructuralLoads AHS 2014 PDFDocument26 pagesYeo StructuralLoads AHS 2014 PDFKarad KaradiasNo ratings yet
- Optimizing Plane RoutesDocument16 pagesOptimizing Plane RoutesagashNo ratings yet
- Fixed-Wing Micro Air Vehicles With Hovering CapabilitiesDocument16 pagesFixed-Wing Micro Air Vehicles With Hovering CapabilitiesBreno Brito MirandaNo ratings yet
- MS4 Draft g21 D Thipe075 Krifo756Document4 pagesMS4 Draft g21 D Thipe075 Krifo756SvLogeshkumarNo ratings yet
- Parallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDDocument15 pagesParallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDdidaNo ratings yet
- Multicopter Design Optimization and ValidationDocument13 pagesMulticopter Design Optimization and ValidationTuyen TranNo ratings yet
- Journal of Environmental Science, Computer Science and Engineering & TechnologyDocument6 pagesJournal of Environmental Science, Computer Science and Engineering & Technologypete pansNo ratings yet
- Response Based Weather-Routing and Operation Planning of Heavy Transport VesselsDocument9 pagesResponse Based Weather-Routing and Operation Planning of Heavy Transport VesselsKuya Fabio VidalNo ratings yet
- Aeroservoelastic Modeling, Analysis, and Design Techniques PDFDocument12 pagesAeroservoelastic Modeling, Analysis, and Design Techniques PDFkarthekeyanmenonNo ratings yet
- Optimoor: Mooring Analysis So Ware For Ships & BargesDocument2 pagesOptimoor: Mooring Analysis So Ware For Ships & BargesTam Jun HuiNo ratings yet
- Air TrafficDocument31 pagesAir TrafficPoulami PalNo ratings yet
- Aircraft Design in A Nutshell PDFDocument25 pagesAircraft Design in A Nutshell PDFYvessNo ratings yet
- Aimsun: Route-Based Mode: 4.1 Shortest Routes ComponentDocument33 pagesAimsun: Route-Based Mode: 4.1 Shortest Routes ComponentDiego GuamánNo ratings yet
- Kim 1985Document11 pagesKim 1985Trịnh Đàm NhânNo ratings yet
- RTO-55 Final Report Human Performance Modeling of en Route ControllersDocument17 pagesRTO-55 Final Report Human Performance Modeling of en Route ControllersNASAdocumentsNo ratings yet
- Difference Between DWA and TEB Local PlannersDocument2 pagesDifference Between DWA and TEB Local PlannersChandrajit GangulyNo ratings yet
- ShuguDocument5 pagesShuguTäð Œvê MîðNo ratings yet
- AERO2562 - Assessment 2Document5 pagesAERO2562 - Assessment 2Tanzia RashidNo ratings yet
- RAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramDocument4 pagesRAMSCRAM-A Flexible RAMJET/SCRAMJET Engine Simulation ProgramSamrat JanjanamNo ratings yet
- An Autonomous Carrier Landing System For Unmannned Aerial VehiclesDocument17 pagesAn Autonomous Carrier Landing System For Unmannned Aerial VehiclesJovan BoskovicNo ratings yet
- Bekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004Document12 pagesBekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004ciksunNo ratings yet
- Ndpaper KunzDocument16 pagesNdpaper KunzEnrico LagonaNo ratings yet
- Ijtpp 04 00008 PDFDocument18 pagesIjtpp 04 00008 PDFdanea haitham abd alrahmanNo ratings yet
- Ose 0502003Document17 pagesOse 0502003MjNo ratings yet
- Blanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehicleDocument12 pagesBlanche-An Experimental in Guidance and Navigation of An Autonomous Robot VehiclemaysamshNo ratings yet
- Reduas 2017 FinalDocument6 pagesReduas 2017 FinalLeopoldo Rodríguez SalazarNo ratings yet
- Capacity of U-Turn at Median Opening: Ite Journal June 1999Document6 pagesCapacity of U-Turn at Median Opening: Ite Journal June 1999Paolo Angelo GutierrezNo ratings yet
- CFD Simulation of A Planing Hull: International Journal For Traffic and Transport Engineering (IJTTE) September 2019Document7 pagesCFD Simulation of A Planing Hull: International Journal For Traffic and Transport Engineering (IJTTE) September 2019shahjadaNo ratings yet
- Experimental and CFD Resistance Calculation of A Small Fast CatamaranDocument7 pagesExperimental and CFD Resistance Calculation of A Small Fast CatamaranChandra SibaraniNo ratings yet
- Unsignalized Intersection TheoryDocument49 pagesUnsignalized Intersection TheoryGaurav VermaNo ratings yet
- Adaptive Autopilot For Marine VesselsDocument6 pagesAdaptive Autopilot For Marine VesselsGAMMA FACULTYNo ratings yet
- Design Study For A Laminar Flying Wing AircraftDocument34 pagesDesign Study For A Laminar Flying Wing Aircraftazam.cheNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
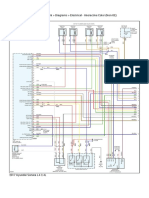
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairDocument6 pages2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaNo ratings yet
- 11 Physical Fitness Assessment 1Document40 pages11 Physical Fitness Assessment 1Danilo Sare IIINo ratings yet
- Drypix 6000 12eDocument501 pagesDrypix 6000 12eraj_meditech100% (1)
- EDO ScriptDocument59 pagesEDO ScriptThais Andrés JiménezNo ratings yet
- YS 700W Bifacial Solar PanelDocument2 pagesYS 700W Bifacial Solar PanelDaniel RodriguezNo ratings yet
- Elevator ControlDocument3 pagesElevator ControlNATHANNo ratings yet
- 01 Overview of The F & B IndustryDocument8 pages01 Overview of The F & B Industrynikki abalosNo ratings yet
- Inventory of Flood Bund PunjabDocument26 pagesInventory of Flood Bund PunjabguildkeyNo ratings yet
- History of Journalism With Whiteboard StyleDocument56 pagesHistory of Journalism With Whiteboard StyleXeon JupiterNo ratings yet
- 4 TH Sem UG Osmoregulation in Aquatic VertebratesDocument6 pages4 TH Sem UG Osmoregulation in Aquatic VertebratesBasak ShreyaNo ratings yet
- NoahDocument2 pagesNoahapi-302505193No ratings yet
- Gummetal Zastosowania Kliniczne 0Document8 pagesGummetal Zastosowania Kliniczne 0ΑΛΕΞΑΝΔΡΟΣ ΣΤΕΦΑΝΗΣNo ratings yet
- Primbon Command 3GDocument3 pagesPrimbon Command 3GEriska FebriantoNo ratings yet
- Board of Technical Education Uttar Pradesh Lucknow: CODE 2298Document2 pagesBoard of Technical Education Uttar Pradesh Lucknow: CODE 2298Md Shaaz100% (1)
- Dell Inspiron 16 5000 (5625) Laptop - Dell IndiaDocument5 pagesDell Inspiron 16 5000 (5625) Laptop - Dell IndiamubbunNo ratings yet
- 100 Câu Viết Lại Câu Ôn Thi Vào Lóp 6Document10 pages100 Câu Viết Lại Câu Ôn Thi Vào Lóp 6Nguyễn Thanh PhươngNo ratings yet
- Iso 3932 1976Document8 pagesIso 3932 1976NaveedNo ratings yet
- VK-53 (ВК-53) Erecting Cut-Out Switch: Maintenance ManualDocument76 pagesVK-53 (ВК-53) Erecting Cut-Out Switch: Maintenance ManualhaileNo ratings yet
- Prince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyDocument1 pagePrince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyPRC Industrial SupplyNo ratings yet
- Apti 2Document17 pagesApti 2Arunkumar MurugappanNo ratings yet
- INFORMATION SHEET No. 1.1.1Document7 pagesINFORMATION SHEET No. 1.1.1Sandre Walden-SCSCNo ratings yet
- Fujifilm X-E4 SpecificationsDocument5 pagesFujifilm X-E4 SpecificationsNikonRumorsNo ratings yet
- Marxist Study of The God of Small ThingsDocument11 pagesMarxist Study of The God of Small ThingsIsrar KhanNo ratings yet
- Norma ASTM C171Document2 pagesNorma ASTM C171Jony Gutiérrez100% (1)
- Semicounductors & Pn-Junction (Complete)Document47 pagesSemicounductors & Pn-Junction (Complete)Khalid AliNo ratings yet
- Critical Thinking and It's Importance in Education: I. Lenin Assistant Professor Auce KaraikudiDocument5 pagesCritical Thinking and It's Importance in Education: I. Lenin Assistant Professor Auce KaraikudiPABLO RAMIRO AGUILAR GONZALEZNo ratings yet
- SC607 Assignment2Document2 pagesSC607 Assignment2Tirthankar AdhikariNo ratings yet
- Essenza Refurbished Siemens MRI MachineDocument2 pagesEssenza Refurbished Siemens MRI Machinetech.arnicahealthNo ratings yet
- B11R Jonckheere JHV2 SpecDocument1 pageB11R Jonckheere JHV2 SpecVishwanath SeetaramNo ratings yet
- IBRO News 2004Document8 pagesIBRO News 2004International Brain Research Organization100% (1)