You might also like
- Micrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsFrom EverandMicrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsNo ratings yet
- An Effort By: Neelkanth Prashant Rishav: CompanyDocument35 pagesAn Effort By: Neelkanth Prashant Rishav: CompanyNeel Kanth100% (1)
- 1 PRoductivityDocument45 pages1 PRoductivityfaiaz joyNo ratings yet
- Overview of Predetermined Motion Time SystemDocument35 pagesOverview of Predetermined Motion Time SystemRizza SangcoNo ratings yet
- Garments. Answer To The Question No: 01 Garment Production/Garment AssemblyDocument33 pagesGarments. Answer To The Question No: 01 Garment Production/Garment AssemblyMoklesur RahmanNo ratings yet
- Session 2 - Apparel Production SystemsDocument25 pagesSession 2 - Apparel Production SystemsPuja PrasadNo ratings yet
- Ch-7 Assembly Line BalanceDocument42 pagesCh-7 Assembly Line BalanceIndra Chandra SetiawanNo ratings yet
- Factors Considered in The Method StudyDocument35 pagesFactors Considered in The Method StudyrajasekaranvgNo ratings yet
- Methods of Improving Productivity in AppDocument12 pagesMethods of Improving Productivity in AppThịnh Nguyễn HữuNo ratings yet
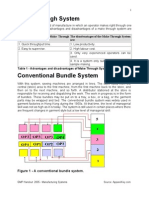
- Progressive Bundle SystemDocument4 pagesProgressive Bundle SystemMeeta Arora100% (1)
- Garment Analyzer™: Flexible Predetermined Motion Time SystemDocument30 pagesGarment Analyzer™: Flexible Predetermined Motion Time SystemardinrajaNo ratings yet
- Basic Knowledge Doing IE Job in GarmentsDocument2 pagesBasic Knowledge Doing IE Job in Garmentssoban adilNo ratings yet
- Garments Production SystemDocument21 pagesGarments Production SystemMd. Taufikul ArifNo ratings yet
- Implementation of Cellular Manufacturingsystems in Garments Industry A Case Study 2Document5 pagesImplementation of Cellular Manufacturingsystems in Garments Industry A Case Study 2DrBollapu SudarshanNo ratings yet
- Manufacturing SystemsDocument8 pagesManufacturing Systemstheriteshtiwari100% (1)
- Strength Properties of FabricDocument14 pagesStrength Properties of FabricOjasvi AgarwalNo ratings yet
- Implementing Industrial Engineering As A Tool in The IndustryDocument37 pagesImplementing Industrial Engineering As A Tool in The IndustryMeenal GraceNo ratings yet
- Amt 191003082 Lab-1Document9 pagesAmt 191003082 Lab-1Nafis HossainNo ratings yet
- Method StudyDocument69 pagesMethod StudySushayan Hunsasuk67% (3)
- Time Study2Document68 pagesTime Study2omkdikNo ratings yet
- Implementation of Lean Manufacturing Tools in Garment Manufacturing Process Focusing Sewing Section of Men's ShirtDocument80 pagesImplementation of Lean Manufacturing Tools in Garment Manufacturing Process Focusing Sewing Section of Men's ShirtAdnan HameedNo ratings yet
- AndonDocument8 pagesAndonSachin kumar0% (1)
- Cutting Room TerminologiesDocument2 pagesCutting Room TerminologiesMuhammad Sharif HasanNo ratings yet
- Use of Software in Textile: Jawaharlal Drda Institute of Engineering and Technology, YavatmalDocument8 pagesUse of Software in Textile: Jawaharlal Drda Institute of Engineering and Technology, YavatmalRajesh Dwivedi100% (1)
- General Steucture of Denim Garment UnitDocument17 pagesGeneral Steucture of Denim Garment UnitumairvmdNo ratings yet
- Time StudyDocument52 pagesTime StudyAnonymous wA6NGuyklDNo ratings yet
- ProductivityDocument37 pagesProductivityKaewal GalaNo ratings yet
- Textile Internship Report: Ocm Private Limited Textile Unit, AmritsarDocument49 pagesTextile Internship Report: Ocm Private Limited Textile Unit, AmritsarJyoti Rawal100% (1)
- 5 I.E - Problems & SolutionsDocument29 pages5 I.E - Problems & Solutionsghosh71No ratings yet
- Steps To Be Taken For Quality Improvement of Textile ProcessingDocument4 pagesSteps To Be Taken For Quality Improvement of Textile ProcessingRezaul Karim TutulNo ratings yet
- Rotor Spinning ReportDocument6 pagesRotor Spinning Reportdsethi23No ratings yet
- Lean ManufacturingDocument3 pagesLean ManufacturinganurajNo ratings yet
- 2013-4-16 - P Using Lean Manufacturing Techniques To Improve Production Efficiency in The Ready Wear Industry and A Case Study PDocument7 pages2013-4-16 - P Using Lean Manufacturing Techniques To Improve Production Efficiency in The Ready Wear Industry and A Case Study Phemlata2014No ratings yet
- Efficiency and Target Calculation: Engr. Motahar Hosen B.Sc. in Ipe (Sust), Mba (Ewu), Mecon in Environmental Economics (Du)Document11 pagesEfficiency and Target Calculation: Engr. Motahar Hosen B.Sc. in Ipe (Sust), Mba (Ewu), Mecon in Environmental Economics (Du)shuvoNo ratings yet
- The Spinning ProcessDocument4 pagesThe Spinning ProcessArslan BandukdaNo ratings yet
- Work Measurement-Compressed VersionDocument48 pagesWork Measurement-Compressed VersionL.a. LadoresNo ratings yet
- IEMS Module 6Document6 pagesIEMS Module 6VenkatramananNo ratings yet
- Method Study of Cuff AttachmentDocument12 pagesMethod Study of Cuff AttachmentKshitij LauNo ratings yet
- Training On Industrial Engineering Basics For RMGDocument2 pagesTraining On Industrial Engineering Basics For RMGSalil BiswasNo ratings yet
- Single Needle Lock StitchDocument2 pagesSingle Needle Lock StitchSilky Prajapati100% (2)
- Work Study Methods in Industrial EngineeringDocument20 pagesWork Study Methods in Industrial EngineeringSanat patilNo ratings yet
- Improvement of Productivity of A Sewing Line by Using Line Balancing TechniqueDocument22 pagesImprovement of Productivity of A Sewing Line by Using Line Balancing TechniqueAronno ChowdhuryNo ratings yet
- Cutting RoomDocument34 pagesCutting Roomaqsa imranNo ratings yet
- Presentation On MIS in TextileDocument21 pagesPresentation On MIS in TextileDevashish Bakshi100% (2)
- Several Steps To Improve Productivity in Garment ProductionDocument7 pagesSeveral Steps To Improve Productivity in Garment ProductionRezaul Karim Tutul100% (1)
- Ergonomic Issues in Apparel IndustryDocument24 pagesErgonomic Issues in Apparel Industryanurag7717No ratings yet
- QC Tools in Apparel Industry Submitted by Priyanka KumariDocument22 pagesQC Tools in Apparel Industry Submitted by Priyanka Kumaripriyanka royNo ratings yet
- Process Re-EngineeringDocument54 pagesProcess Re-EngineeringAkanksha GuptaNo ratings yet
- Project IeDocument90 pagesProject IeZubayer AhmmedNo ratings yet
- Carl A. Lawrence. Fundamental of Spun Yarn Technology. CRC Press, 2003Document4 pagesCarl A. Lawrence. Fundamental of Spun Yarn Technology. CRC Press, 2003HawNo ratings yet
- From-To Chart ExampleDocument22 pagesFrom-To Chart Exampleajeng.saraswatiNo ratings yet
- Fabric Defects: - Causes - Types - 4 Point System For MeasuringDocument8 pagesFabric Defects: - Causes - Types - 4 Point System For MeasuringTarang MathurNo ratings yet
- Spme Jury AssignmentDocument52 pagesSpme Jury AssignmentPalak AggarwalNo ratings yet
- Make Through Production SystemDocument9 pagesMake Through Production Systemshrutiagarwal9229100% (1)
- Flowchart and Manufacturing Process For Sweater ManufacturingDocument4 pagesFlowchart and Manufacturing Process For Sweater ManufacturingSiddhesh GautamNo ratings yet
- Motion StudyDocument32 pagesMotion StudySartika CahyasariNo ratings yet
- Lecture5 - Micro Andmemo Motion StudyDocument68 pagesLecture5 - Micro Andmemo Motion StudyALFRED KIRUBARAJ A. (1199)No ratings yet
- Motion Study Unit - 4Document34 pagesMotion Study Unit - 4AMIT KUMAR SINGHNo ratings yet
- Principles of Motion EconomyDocument3 pagesPrinciples of Motion EconomyR Màhá LâkshmîNo ratings yet
- The Principles of Motion EconomyDocument8 pagesThe Principles of Motion Economyrrizz100% (1)
- Gujarat Technological University: Ntegrated Ersonality Evelopment OurseDocument4 pagesGujarat Technological University: Ntegrated Ersonality Evelopment OursejpbhimaniNo ratings yet
- Gujarat Technological University: Page 1 of 3Document3 pagesGujarat Technological University: Page 1 of 3jpbhimaniNo ratings yet
- Gujarat Technological University: Page 1 of 3Document3 pagesGujarat Technological University: Page 1 of 3jpbhimaniNo ratings yet
- Transportation and AssignmentDocument47 pagesTransportation and AssignmentjpbhimaniNo ratings yet
- Chapter 1. Operation Research - NoteDocument13 pagesChapter 1. Operation Research - Notejpbhimani100% (1)
- Decision Variables 0 0 X Y Objective MAX 0 Constraint 1 0 3 Constraint 2 0 2Document1 pageDecision Variables 0 0 X Y Objective MAX 0 Constraint 1 0 3 Constraint 2 0 2jpbhimaniNo ratings yet
- Transportation and AssignmentDocument31 pagesTransportation and AssignmentjpbhimaniNo ratings yet
- Flow Process ChartDocument1 pageFlow Process ChartjpbhimaniNo ratings yet
- Gujarat Technological University: InstructionsDocument4 pagesGujarat Technological University: Instructionsjpbhimani100% (1)
- Operation Research 171901 Summer 2014Document3 pagesOperation Research 171901 Summer 2014jpbhimani100% (1)
- Manufacturing Technology - MCQDocument74 pagesManufacturing Technology - MCQjpbhimani100% (1)
- Planer MachineDocument37 pagesPlaner MachinejpbhimaniNo ratings yet
- System of Linear Equation and ApplicationDocument32 pagesSystem of Linear Equation and Applicationihsaanbava0% (1)
- Project BAGETS Wok Plan and Budget SIPDocument4 pagesProject BAGETS Wok Plan and Budget SIPMaia AlvarezNo ratings yet
- Experiment 2: Multimeter Laboratory ReportDocument4 pagesExperiment 2: Multimeter Laboratory ReportNoir SalifoNo ratings yet
- GT-3000 PrintDocument3 pagesGT-3000 Printmanual imbNo ratings yet
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 pagesDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiNo ratings yet
- General Introduction: 1.1 What Is Manufacturing (MFG) ?Document19 pagesGeneral Introduction: 1.1 What Is Manufacturing (MFG) ?Mohammed AbushammalaNo ratings yet
- 10CS 33 LOGIC DESIGN UNIT - 2 Combinational Logic CircuitsDocument10 pages10CS 33 LOGIC DESIGN UNIT - 2 Combinational Logic CircuitsMallikarjunBhiradeNo ratings yet
- WDP Process Diagrams v1Document6 pagesWDP Process Diagrams v1Ryan HengNo ratings yet
- Defenders of The Empire v1.4Document13 pagesDefenders of The Empire v1.4Iker Antolín MedinaNo ratings yet
- SPWM Vs SVMDocument11 pagesSPWM Vs SVMpmbalajibtechNo ratings yet
- M4110 Leakage Reactance InterfaceDocument2 pagesM4110 Leakage Reactance InterfaceGuru MishraNo ratings yet
- TOK Assessed Student WorkDocument10 pagesTOK Assessed Student WorkPeter Jun Park100% (1)
- Ojt Evaluation Forms (Supervised Industry Training) SampleDocument5 pagesOjt Evaluation Forms (Supervised Industry Training) SampleJayJay Jimenez100% (3)
- Schematic Circuits: Section C - ElectricsDocument1 pageSchematic Circuits: Section C - ElectricsIonut GrozaNo ratings yet
- Distribution of Continuous R.V.: Normal Distribution (CH 1.4) TopicsDocument7 pagesDistribution of Continuous R.V.: Normal Distribution (CH 1.4) TopicsPhạm Ngọc HòaNo ratings yet
- Main-A5-Booklet (Spreads) PDFDocument12 pagesMain-A5-Booklet (Spreads) PDFanniyahNo ratings yet
- Blackstone The Dash Model #1610 Owner's ManualDocument53 pagesBlackstone The Dash Model #1610 Owner's ManualSydney Adam SteeleNo ratings yet
- CompTIA A+ Lesson 3 Understanding, PATA, SATA, SCSIDocument8 pagesCompTIA A+ Lesson 3 Understanding, PATA, SATA, SCSIAli Ghalehban - علی قلعه بانNo ratings yet
- Diagrama Hilux 1KD-2KD PDFDocument11 pagesDiagrama Hilux 1KD-2KD PDFJeni100% (1)
- WT&D (Optimization of WDS) PDFDocument89 pagesWT&D (Optimization of WDS) PDFAbirham TilahunNo ratings yet
- Grade 6 q2 Mathematics LasDocument151 pagesGrade 6 q2 Mathematics LasERIC VALLE80% (5)
- 1 Lesson Plan Self Assessment 1Document1 page1 Lesson Plan Self Assessment 1Neha SharmaNo ratings yet
- DLL - English 5 - Q3 - W8Document8 pagesDLL - English 5 - Q3 - W8Merlyn S. Al-osNo ratings yet
- Remediation of AlphabetsDocument34 pagesRemediation of AlphabetsAbdurahmanNo ratings yet
- ASM1 ProgramingDocument14 pagesASM1 ProgramingTran Cong Hoang (BTEC HN)No ratings yet
- 3D Tetris Cake Evening 2Document13 pages3D Tetris Cake Evening 2Subham KarmakarNo ratings yet
- Investigation of The Microstructures, Properties, and Toughening Mechanism of Polypropylene/calcium Carbonate Toughening Masterbatch CompositesDocument16 pagesInvestigation of The Microstructures, Properties, and Toughening Mechanism of Polypropylene/calcium Carbonate Toughening Masterbatch CompositesHatchi KouNo ratings yet
- American J of Comm Psychol - 2023 - Palmer - Looted Artifacts and Museums Perpetuation of Imperialism and RacismDocument9 pagesAmerican J of Comm Psychol - 2023 - Palmer - Looted Artifacts and Museums Perpetuation of Imperialism and RacismeyeohneeduhNo ratings yet
- Some Solutions To Enderton LogicDocument16 pagesSome Solutions To Enderton LogicJason100% (1)
- TakeawaysDocument2 pagesTakeawaysapi-509552154No ratings yet
- The Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneFrom EverandThe Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneRating: 4.5 out of 5 stars4.5/5 (5)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Laws of UX: Using Psychology to Design Better Products & ServicesFrom EverandLaws of UX: Using Psychology to Design Better Products & ServicesRating: 5 out of 5 stars5/5 (9)
- How to Teach Nature Journaling: Curiosity, Wonder, AttentionFrom EverandHow to Teach Nature Journaling: Curiosity, Wonder, AttentionRating: 4.5 out of 5 stars4.5/5 (3)
- Lower Secondary Science Workbook: Stage 8From EverandLower Secondary Science Workbook: Stage 8Rating: 5 out of 5 stars5/5 (1)
- The School Garden Curriculum: An Integrated K-8 Guide for Discovering Science, Ecology, and Whole-Systems ThinkingFrom EverandThe School Garden Curriculum: An Integrated K-8 Guide for Discovering Science, Ecology, and Whole-Systems ThinkingNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- AI and the Future of Education: Teaching in the Age of Artificial IntelligenceFrom EverandAI and the Future of Education: Teaching in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (1)
- A-Level Chemistry Revision: Cheeky Revision ShortcutsFrom EverandA-Level Chemistry Revision: Cheeky Revision ShortcutsRating: 4 out of 5 stars4/5 (5)
- A-level Biology Revision: Cheeky Revision ShortcutsFrom EverandA-level Biology Revision: Cheeky Revision ShortcutsRating: 5 out of 5 stars5/5 (5)
- Common Core Science 4 Today, Grade 3: Daily Skill PracticeFrom EverandCommon Core Science 4 Today, Grade 3: Daily Skill PracticeRating: 3.5 out of 5 stars3.5/5 (2)
- What is the Scientific Method? Science Book for Kids | Children's Science BooksFrom EverandWhat is the Scientific Method? Science Book for Kids | Children's Science BooksRating: 5 out of 5 stars5/5 (1)
- The Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsFrom EverandThe Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsNo ratings yet