You might also like
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsFrom EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsNo ratings yet
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013From EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013No ratings yet
- Robotique ChapiteIII ModélisationDocument65 pagesRobotique ChapiteIII ModélisationimenenouvelleNo ratings yet
- Khalil-Dombre Modelisation PDFDocument52 pagesKhalil-Dombre Modelisation PDFspeedov73100% (1)
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaNo ratings yet
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamNo ratings yet
- Robotique Et Vision CoursDocument59 pagesRobotique Et Vision CoursbastaouiiNo ratings yet
- Slides Cinématique Robots SériesDocument31 pagesSlides Cinématique Robots SériesMbaira LeilaNo ratings yet
- PHDCOMPANY2000 Robot DeltaDocument229 pagesPHDCOMPANY2000 Robot DeltaguygillesNo ratings yet
- 3 0 Systèmes Mécaniques Articulés Et RobotiqueDocument100 pages3 0 Systèmes Mécaniques Articulés Et RobotiqueredaNo ratings yet
- Exercice Robotique PDFDocument2 pagesExercice Robotique PDFRobert75% (4)
- Cours Robotique PDFDocument146 pagesCours Robotique PDFBadreddine BouzouitaNo ratings yet
- Exos RobotiqueDocument39 pagesExos RobotiqueZeyd Zizo50% (2)
- TD PolytechDocument9 pagesTD Polytechlahssane hmidatNo ratings yet
- Chap01 - Introduction Genérale À La Robotique PDFDocument11 pagesChap01 - Introduction Genérale À La Robotique PDFKamal MefNo ratings yet
- Introduction À L'électronique NumériqueDocument36 pagesIntroduction À L'électronique NumériqueGuillaume HaussNo ratings yet
- Chapitre1 Robotique 2019Document32 pagesChapitre1 Robotique 2019Anonymous yGRqYCRR1jNo ratings yet
- Cours Capteurs InertielsDocument7 pagesCours Capteurs InertielsStephane Durel Mbida0% (1)
- Exam Robotique AITLAHCENDocument5 pagesExam Robotique AITLAHCENCaptain Teddy BearNo ratings yet
- TD - Capteurs - MMSS 2017 2018 Série1 PDFDocument2 pagesTD - Capteurs - MMSS 2017 2018 Série1 PDFAbdelkarim RamNo ratings yet
- Cours PWMDocument43 pagesCours PWMzakarii67% (3)
- Robotics Course DynamicsDocument30 pagesRobotics Course Dynamicshocine benmaizaNo ratings yet
- 1 Définition DDocument10 pages1 Définition DNedjoua BenaliNo ratings yet
- TD4 CapteursDocument2 pagesTD4 CapteursRabah AmidiNo ratings yet
- Cours Robotique 2014 PDFDocument143 pagesCours Robotique 2014 PDFAyou HamNo ratings yet
- TD1 ContinuDocument4 pagesTD1 Continudhaouadi hazemNo ratings yet
- Regles Simplification Schemas Blocs2Document2 pagesRegles Simplification Schemas Blocs2Mohcine ElbrNo ratings yet
- TD Modélisation Des Systèmes MécatroniquesDocument10 pagesTD Modélisation Des Systèmes MécatroniquesStephane Durel Mbida100% (2)
- LounisAdouane TP RobotiquePolytechClermontDocument14 pagesLounisAdouane TP RobotiquePolytechClermontJulio HernandezNo ratings yet
- 2010 2011 Solution TP 2 PDFDocument2 pages2010 2011 Solution TP 2 PDFspeedov73No ratings yet
- ExercicesRobEtAutomYCCorrPartie3v013 12 03Document57 pagesExercicesRobEtAutomYCCorrPartie3v013 12 03Luka MadridNo ratings yet
- PR Ése Ntation 7Document22 pagesPR Ése Ntation 7Jawher SalemNo ratings yet
- TPDocument24 pagesTPAlassane Diouf100% (3)
- Robotique Cours PDFDocument93 pagesRobotique Cours PDFOussama Ben TanfousNo ratings yet
- Cours Robot Mobile Master CO - 1ere PartieDocument33 pagesCours Robot Mobile Master CO - 1ere Partiehamdi jihen100% (1)
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréNo ratings yet
- Cours Robotique Intéressant PDFDocument143 pagesCours Robotique Intéressant PDFokacha0amraouy100% (1)
- Robot - Explorer - Éviteur D'obstacleDocument48 pagesRobot - Explorer - Éviteur D'obstaclebilaNo ratings yet
- Examen Elec 4 GSE 2011 RobotiqueDocument2 pagesExamen Elec 4 GSE 2011 RobotiqueMohamed Oulad Chaikh100% (1)
- Cours de Robotique-V3-18-12-2018Document51 pagesCours de Robotique-V3-18-12-2018Omar 95No ratings yet
- Cours Robotique 31102020Document94 pagesCours Robotique 31102020Omar 95No ratings yet
- Théorie de Mécanisme 6Document7 pagesThéorie de Mécanisme 6hamza100% (2)
- IAO - 20simDocument32 pagesIAO - 20simYounessElkarkouriNo ratings yet
- Mini Projet de EsaDocument30 pagesMini Projet de EsaBakr IbrahimiNo ratings yet
- TD6 AsservissementDocument2 pagesTD6 AsservissementredNo ratings yet
- TP1Document23 pagesTP1AichaELJafoufi100% (1)
- Le Bus SpiDocument14 pagesLe Bus SpiLam ChNo ratings yet
- RobotiqueDocument83 pagesRobotiqueYassineZklNo ratings yet
- BG Cours CSDocument70 pagesBG Cours CSAbdel DaaNo ratings yet
- Cours L1 RobotiqueDocument61 pagesCours L1 RobotiqueFAROK businessNo ratings yet
- Exam Robotique 03Document2 pagesExam Robotique 03Jaouad ElfathNo ratings yet
- TP Modele GeometriqueDocument8 pagesTP Modele GeometriqueAmine EL FERHANINo ratings yet
- Cours RobotiqueDocument82 pagesCours RobotiqueWided Maghraoui100% (1)
- Commande Moteur Pas A Pas Bipolaire Par Fpga (Altera Cyclone 2)Document23 pagesCommande Moteur Pas A Pas Bipolaire Par Fpga (Altera Cyclone 2)Omar Bouamoud80% (5)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesFrom EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesRating: 2 out of 5 stars2/5 (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !From EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants. Le guide complet de la Fusion 360 d'Autodesk !No ratings yet
- Chapitre 3Document17 pagesChapitre 3salahNo ratings yet
- Recher Che Sur L'Alger IE: Cultur EET Patrim Oine: Yousse F Aziz FrijaDocument1 pageRecher Che Sur L'Alger IE: Cultur EET Patrim Oine: Yousse F Aziz FrijaMounir FrijaNo ratings yet
- Modèle Fiche Matière - Usinage NumériqueDocument2 pagesModèle Fiche Matière - Usinage NumériqueMounir FrijaNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Methodologie de Choix D'Une Architecture de Machine-Outil 5 Axes Pour L'Usinage Du TitaneDocument12 pagesMethodologie de Choix D'Une Architecture de Machine-Outil 5 Axes Pour L'Usinage Du TitaneMejri ImedNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Modèle Fiche Matière - DiagnosticDocument2 pagesModèle Fiche Matière - DiagnosticMounir Frija100% (2)
- Programme JSE2K21 FINALEDocument1 pageProgramme JSE2K21 FINALEMounir FrijaNo ratings yet
- Fiche de Projet IndividuelDocument1 pageFiche de Projet IndividuelMounir FrijaNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Principes PDCADocument26 pagesPrincipes PDCANesrine NouiraNo ratings yet
- La Proposition Du ProgrammeDocument1 pageLa Proposition Du ProgrammeMounir FrijaNo ratings yet
- RUGOSITEDocument13 pagesRUGOSITEMounir FrijaNo ratings yet
- ProgDocument2 pagesProgMounir FrijaNo ratings yet
- Le Kaizen: Ou L'amélioration ContinueDocument54 pagesLe Kaizen: Ou L'amélioration ContinueMounir FrijaNo ratings yet
- Afftage Manuel Des Outils Coupants-1558476221Document2 pagesAfftage Manuel Des Outils Coupants-1558476221Ait Abderrahman AbderrahimNo ratings yet
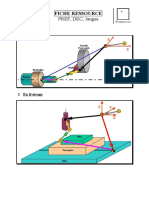
- FRPREFDECJAUGESDocument2 pagesFRPREFDECJAUGESMounir FrijaNo ratings yet
- PREFDECFDocument13 pagesPREFDECFMounir FrijaNo ratings yet
- Programmation Assistée Par OrdinateurDocument64 pagesProgrammation Assistée Par OrdinateurMounir FrijaNo ratings yet
- Machines-Outils À Commande Numérique Structure, Modélisation Et RéglageDocument67 pagesMachines-Outils À Commande Numérique Structure, Modélisation Et RéglageMohamed El Hadi Redjaimia69% (16)
- Prog MocnDocument55 pagesProg MocnMounir Frija100% (1)
- Formation Affûtage Manuel Des Outils Coupants - Usinage - Usinage ProductiqueDocument1 pageFormation Affûtage Manuel Des Outils Coupants - Usinage - Usinage ProductiqueMounir FrijaNo ratings yet
- Module 01 Formation NourrissonDocument4 pagesModule 01 Formation NourrissonMounir FrijaNo ratings yet
- Module 02 Formation NourrissonDocument3 pagesModule 02 Formation NourrissonMounir FrijaNo ratings yet
- Fabrication Assistée Par OrdinateurDocument89 pagesFabrication Assistée Par OrdinateurAlaa Eddine Radh93% (14)
- AffutageDocument1 pageAffutageMounir FrijaNo ratings yet
- CV JciDocument2 pagesCV JciMounir Frija100% (1)
- CV Mounir Frija 2020 FrancaisDocument3 pagesCV Mounir Frija 2020 FrancaisMounir FrijaNo ratings yet
- La Nuit de L Info 2019-SujetDocument3 pagesLa Nuit de L Info 2019-SujetMounir FrijaNo ratings yet
- Mission Vision Valeurs de JCI - Franc ºais PDFDocument1 pageMission Vision Valeurs de JCI - Franc ºais PDFMounir FrijaNo ratings yet
- CV Mounir Frija FormateurDocument3 pagesCV Mounir Frija FormateurMounir FrijaNo ratings yet
- Alzheimer - Abir JaouadiDocument36 pagesAlzheimer - Abir JaouadiAsma AssidiNo ratings yet
- Guide de L'evaluation Des Politique Publique PDFDocument162 pagesGuide de L'evaluation Des Politique Publique PDFAhmed OuazeneNo ratings yet
- M1MC Ap Hoby N01Document60 pagesM1MC Ap Hoby N01MIHAJA Fabrice100% (1)
- Methode Danalyse Des Micro LésisonDocument18 pagesMethode Danalyse Des Micro LésisonHadrien De GreefNo ratings yet
- (Jardinage) Leroy Merlin - Bricolage - Guide Des Projets - 2 PDFDocument76 pages(Jardinage) Leroy Merlin - Bricolage - Guide Des Projets - 2 PDFكن للخير داعياNo ratings yet
- (@lisons - Ensemble) de La Génétique À Di... by FrancisDocument267 pages(@lisons - Ensemble) de La Génétique À Di... by FrancisGuilamNo ratings yet
- Les Jalons de La Philosophie de L-ConvertiDocument4 pagesLes Jalons de La Philosophie de L-ConvertiWagniNo ratings yet
- 1 Hypocondriaque AppDocument2 pages1 Hypocondriaque Appthomas10meiringNo ratings yet
- Ec Chim4231-Chimie Structurale - Td2-2: Université de Yaoundé I-Ecole Normale Supérieure-Département de ChimieDocument2 pagesEc Chim4231-Chimie Structurale - Td2-2: Université de Yaoundé I-Ecole Normale Supérieure-Département de ChimieKeuamene Djogue MarozzottiNo ratings yet
- Je Ne Serais Pas Arrivée Là Si 27 Femmes Racontent by Cojean Annick (Cojean Annick)Document226 pagesJe Ne Serais Pas Arrivée Là Si 27 Femmes Racontent by Cojean Annick (Cojean Annick)Melina Maurer100% (1)
- Universite D'Ibn Badis Faculte Des Sciences Exactes Et de L'InformatiqueDocument27 pagesUniversite D'Ibn Badis Faculte Des Sciences Exactes Et de L'Informatiqueazou korbaNo ratings yet
- Theorie GeometrieDocument6 pagesTheorie GeometrieCécé Charles KoliéNo ratings yet
- Les 214 Clefs KanjiDocument6 pagesLes 214 Clefs Kanjiyukikoff100% (2)
- Construction de L'objet Et Ethique de La RechercheDocument19 pagesConstruction de L'objet Et Ethique de La Recherchecyrille bony aimé YeboueNo ratings yet
- Série 1 Chimie Les MélangesDocument2 pagesSérie 1 Chimie Les MélangesSamou_haa67% (3)
- Oncf Voyages Mehdi EssayssiDocument1 pageOncf Voyages Mehdi EssayssiT4E GAMINGNo ratings yet
- Entre Les Mains Du Potier - Shora KUETU - 2012Document184 pagesEntre Les Mains Du Potier - Shora KUETU - 2012fabrice Konan100% (1)
- OrthokératologieDocument78 pagesOrthokératologieaurelghostNo ratings yet
- 2014 15 En208 TD1Document4 pages2014 15 En208 TD1YAHYA DbaghiNo ratings yet
- Chapitre 1 Les Grandes Ensembles de La Plateforme Saharienne PDFDocument3 pagesChapitre 1 Les Grandes Ensembles de La Plateforme Saharienne PDFNabila AkkouNo ratings yet
- AO4401Fr-VG - ST-2C-0013-12A PDFDocument48 pagesAO4401Fr-VG - ST-2C-0013-12A PDFArchanDecoNo ratings yet
- La Vrai Cuisine Familiale Italienne - A TavolaDocument22 pagesLa Vrai Cuisine Familiale Italienne - A TavoladrecksenNo ratings yet
- Types Machines ElectriquesDocument23 pagesTypes Machines ElectriquesRaph AelNo ratings yet
- Structure de La Matière - Atomes, Liaisons Chimiques Et CristallographieDocument448 pagesStructure de La Matière - Atomes, Liaisons Chimiques Et CristallographieKenz L'Aïd100% (2)
- Dokumen - Tips - TD Partie 2 2016 3 8 TD Conception Des BD Rparties Exercice 1 FragmentationDocument22 pagesDokumen - Tips - TD Partie 2 2016 3 8 TD Conception Des BD Rparties Exercice 1 FragmentationGhassen HaamdiNo ratings yet
- Dossier de Presse 4-6-2014Document16 pagesDossier de Presse 4-6-2014airmaxNo ratings yet
- Serie - 3 s1 1APICDocument1 pageSerie - 3 s1 1APICAbdo IdrissiNo ratings yet
- Strategie Vaccination Covid 19 Place Vaccin A Arnm Comirnaty bnt162b2Document98 pagesStrategie Vaccination Covid 19 Place Vaccin A Arnm Comirnaty bnt162b2Martin NASSENo ratings yet
- Chapitre 3 Les Opérateurs Du Langage CDocument6 pagesChapitre 3 Les Opérateurs Du Langage CultrachaabouniNo ratings yet
- Phonétique MD 02 M. ArahalDocument69 pagesPhonétique MD 02 M. ArahalcoolmarouaneNo ratings yet