You might also like
- Recher Che Sur L'Alger IE: Cultur EET Patrim Oine: Yousse F Aziz FrijaDocument1 pageRecher Che Sur L'Alger IE: Cultur EET Patrim Oine: Yousse F Aziz FrijaMounir FrijaNo ratings yet
- Modèle Fiche Matière - Usinage NumériqueDocument2 pagesModèle Fiche Matière - Usinage NumériqueMounir FrijaNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Methodologie de Choix D'Une Architecture de Machine-Outil 5 Axes Pour L'Usinage Du TitaneDocument12 pagesMethodologie de Choix D'Une Architecture de Machine-Outil 5 Axes Pour L'Usinage Du TitaneMejri ImedNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Modèle Fiche Matière - DiagnosticDocument2 pagesModèle Fiche Matière - DiagnosticMounir Frija100% (2)
- Programme JSE2K21 FINALEDocument1 pageProgramme JSE2K21 FINALEMounir FrijaNo ratings yet
- Fiche de Projet IndividuelDocument1 pageFiche de Projet IndividuelMounir FrijaNo ratings yet
- Dessin 1Document1 pageDessin 1Mounir FrijaNo ratings yet
- Principes PDCADocument26 pagesPrincipes PDCANesrine NouiraNo ratings yet
- La Proposition Du ProgrammeDocument1 pageLa Proposition Du ProgrammeMounir FrijaNo ratings yet
- RUGOSITEDocument13 pagesRUGOSITEMounir FrijaNo ratings yet
- ProgDocument2 pagesProgMounir FrijaNo ratings yet
- Le Kaizen: Ou L'amélioration ContinueDocument54 pagesLe Kaizen: Ou L'amélioration ContinueMounir FrijaNo ratings yet
- Afftage Manuel Des Outils Coupants-1558476221Document2 pagesAfftage Manuel Des Outils Coupants-1558476221Ait Abderrahman AbderrahimNo ratings yet
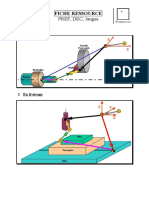
- FRPREFDECJAUGESDocument2 pagesFRPREFDECJAUGESMounir FrijaNo ratings yet
- PREFDECFDocument13 pagesPREFDECFMounir FrijaNo ratings yet
- Programmation Assistée Par OrdinateurDocument64 pagesProgrammation Assistée Par OrdinateurMounir FrijaNo ratings yet
- Machines-Outils À Commande Numérique Structure, Modélisation Et RéglageDocument67 pagesMachines-Outils À Commande Numérique Structure, Modélisation Et RéglageMohamed El Hadi Redjaimia69% (16)
- Prog MocnDocument55 pagesProg MocnMounir Frija100% (1)
- Formation Affûtage Manuel Des Outils Coupants - Usinage - Usinage ProductiqueDocument1 pageFormation Affûtage Manuel Des Outils Coupants - Usinage - Usinage ProductiqueMounir FrijaNo ratings yet
- Module 01 Formation NourrissonDocument4 pagesModule 01 Formation NourrissonMounir FrijaNo ratings yet
- Module 02 Formation NourrissonDocument3 pagesModule 02 Formation NourrissonMounir FrijaNo ratings yet
- Fabrication Assistée Par OrdinateurDocument89 pagesFabrication Assistée Par OrdinateurAlaa Eddine Radh93% (14)
- AffutageDocument1 pageAffutageMounir FrijaNo ratings yet
- CV JciDocument2 pagesCV JciMounir Frija100% (1)
- CV Mounir Frija 2020 FrancaisDocument3 pagesCV Mounir Frija 2020 FrancaisMounir FrijaNo ratings yet
- La Nuit de L Info 2019-SujetDocument3 pagesLa Nuit de L Info 2019-SujetMounir FrijaNo ratings yet
- Mission Vision Valeurs de JCI - Franc ºais PDFDocument1 pageMission Vision Valeurs de JCI - Franc ºais PDFMounir FrijaNo ratings yet
- CV Mounir Frija FormateurDocument3 pagesCV Mounir Frija FormateurMounir FrijaNo ratings yet
- coursSM1 PDFDocument21 pagescoursSM1 PDFSamah SamahNo ratings yet
- Barres SinusDocument6 pagesBarres Sinus26bj5v6dh9No ratings yet
- MMC 2024 Cours Chap2 Partie 2 EtuDocument15 pagesMMC 2024 Cours Chap2 Partie 2 EtulyesNo ratings yet
- Mod 2 DtproDocument9 pagesMod 2 DtproÖzledim ZeynepNo ratings yet
- Réseau de Bravais - WikipédiaDocument16 pagesRéseau de Bravais - WikipédiaGiresse Alpha KimbembeNo ratings yet
- Sujet Du Bepc Rouge 2005 MathematiquesDocument2 pagesSujet Du Bepc Rouge 2005 MathematiquesDoré NgohNo ratings yet
- Devoir de Contrôle N°1 - Math - 1ère AS (2017-2018) MR Afli AbdelazizDocument2 pagesDevoir de Contrôle N°1 - Math - 1ère AS (2017-2018) MR Afli AbdelazizSassi LassaadNo ratings yet
- Integrale Cours de Maths en Terminale 1301Document5 pagesIntegrale Cours de Maths en Terminale 1301yohann mayetNo ratings yet
- Série Ec - Dynamique de Rotation (3T) .2023 Idéal PDFDocument2 pagesSérie Ec - Dynamique de Rotation (3T) .2023 Idéal PDFBakari AnisNo ratings yet
- Cours3 (25032021)Document8 pagesCours3 (25032021)elhoussaine saidNo ratings yet
- 2019 Progress in Physics Detail CalculDocument42 pages2019 Progress in Physics Detail Calculgefregmail.comNo ratings yet
- Branches Infinies PDFDocument3 pagesBranches Infinies PDFUziel Mbairi100% (1)
- Asset-V1 MinesTelecom+04006+session09+type@asset+block@Télécom FBD S2 AlgèbrePartie2 V2Document14 pagesAsset-V1 MinesTelecom+04006+session09+type@asset+block@Télécom FBD S2 AlgèbrePartie2 V2Nacer IdjedareneNo ratings yet
- Capes Externe 2022 Epreuve 1Document35 pagesCapes Externe 2022 Epreuve 1nermineNo ratings yet
- 3-1 - Modelisation SystemesDocument24 pages3-1 - Modelisation SystemesYassine LakhalNo ratings yet
- Axiomes DPDocument33 pagesAxiomes DPFlash FacebookNo ratings yet
- TrigonometrieDocument3 pagesTrigonometrieSafaeNo ratings yet
- Cours CaoDocument66 pagesCours Caofatmahalouss0909No ratings yet
- Dérivation Et Étude Des Fonctions - Résumé de Cours 1Document4 pagesDérivation Et Étude Des Fonctions - Résumé de Cours 1EL AZHAR YOUSSEFNo ratings yet
- Comment Trouver Une Écriture Algébrique D'un Nombre Complexe ?Document1 pageComment Trouver Une Écriture Algébrique D'un Nombre Complexe ?exos2mathNo ratings yet
- COURS Eleves Seconde PowerpointDocument14 pagesCOURS Eleves Seconde PowerpointanthonydebibakasNo ratings yet
- Présentation ADD - AFC Version RectifiéeDocument65 pagesPrésentation ADD - AFC Version RectifiéeelarbiNo ratings yet
- OptimisationDocument46 pagesOptimisationsabrineNo ratings yet
- Courbes SurfacesDocument135 pagesCourbes Surfacesmohamed ismael toure mohamed ismaelNo ratings yet
- Droites Remarquables Dans Le Triangle Fiches Pedagogiques Maths 2AC PDF 1 (1) 2Document16 pagesDroites Remarquables Dans Le Triangle Fiches Pedagogiques Maths 2AC PDF 1 (1) 2yahyaaitsbyigkNo ratings yet
- Chapitre 2 Diffraction FDocument24 pagesChapitre 2 Diffraction FMed AissNo ratings yet
- GM DS7-2015 CorrigeDocument6 pagesGM DS7-2015 CorrigeZakaria BENBARKANo ratings yet
- Le Gradient D'une Fonction ScalaireDocument3 pagesLe Gradient D'une Fonction ScalaireSami NasryNo ratings yet
- Devoir de Contrôle N°1 - Math - Bac Math (2015-2016) MR Baazouzi ZouhaierDocument2 pagesDevoir de Contrôle N°1 - Math - Bac Math (2015-2016) MR Baazouzi ZouhaierChellali RabahNo ratings yet