You might also like
- Proyecto Letrero ProgramableDocument101 pagesProyecto Letrero ProgramableMarca DeybitNo ratings yet
- Examen Nivel I - TermografiaDocument13 pagesExamen Nivel I - TermografiaGeane Carlo Sanchez Jara80% (10)
- Métodos Líquidos PenetrantesDocument1 pageMétodos Líquidos PenetrantesMarca DeybitNo ratings yet
- Soldadura SMDDocument13 pagesSoldadura SMDMarca DeybitNo ratings yet
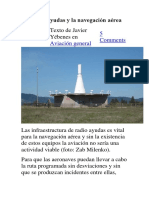
- Las Radio Ayudas y La Navegación AéreaDocument22 pagesLas Radio Ayudas y La Navegación AéreaMarca DeybitNo ratings yet
- Articulo 3 ND-EFISDocument6 pagesArticulo 3 ND-EFISMarca DeybitNo ratings yet
- Psicología General y Sus RamasDocument3 pagesPsicología General y Sus RamasMarca DeybitNo ratings yet
- Entrega 3 RSEDocument11 pagesEntrega 3 RSEcieris gomez cortesNo ratings yet
- Tecnicas de Identificacion de ResiduosDocument5 pagesTecnicas de Identificacion de ResiduosMonserrath SalazarNo ratings yet
- Tabla MedicamentosDocument5 pagesTabla MedicamentosJesus Azael MartinezNo ratings yet
- Norma NTC 5480 (Final)Document21 pagesNorma NTC 5480 (Final)oscar espinelNo ratings yet
- 2.1. Magnetización: 2. MagnetismoDocument29 pages2.1. Magnetización: 2. MagnetismoRodas Ochoa Álvaro MauricioNo ratings yet
- Cementos BioceramicosDocument39 pagesCementos BioceramicosJorge RamirezNo ratings yet
- Cuestionario 2 Proceso Industrial I ETASDocument2 pagesCuestionario 2 Proceso Industrial I ETASPablo NavarroNo ratings yet
- PLAN DE CONTINGENCIA TRANSLAGO 2022 CisternasDocument26 pagesPLAN DE CONTINGENCIA TRANSLAGO 2022 CisternasGuillermo AcostaNo ratings yet
- TotoraDocument27 pagesTotoraKatia Huaraya MamaniNo ratings yet
- Presentación Clase Identificación 2017Document19 pagesPresentación Clase Identificación 2017Romina BrugmanNo ratings yet
- Evaluacion CAPACITACIÓNDocument3 pagesEvaluacion CAPACITACIÓNestrella arias de los santosNo ratings yet
- Metodologia de La Investigacion - Roberto Hernandez SampieriDocument269 pagesMetodologia de La Investigacion - Roberto Hernandez SampieriBiblioDigitalDerecho100% (3)
- Capacitacion Ip - HFC PDFDocument46 pagesCapacitacion Ip - HFC PDFRodrigo LandazuriNo ratings yet
- Los Primeros Pobladores Del Peru 1°Document32 pagesLos Primeros Pobladores Del Peru 1°MARCO ANTONIO CHOQUE PECEROSNo ratings yet
- Guia de Observacion Matematicas PDFDocument4 pagesGuia de Observacion Matematicas PDFVianey Padilla50% (2)
- Tema El Modelo Educativo de Ucn y Estudio Del SyllabusDocument7 pagesTema El Modelo Educativo de Ucn y Estudio Del SyllabusFlor OsorioNo ratings yet
- Caso George FloydDocument4 pagesCaso George FloydBrisa SaavedraNo ratings yet
- 45 Frases de Grandes Hombres Que Machacaron Cruelmente La Imagen de La MujerDocument4 pages45 Frases de Grandes Hombres Que Machacaron Cruelmente La Imagen de La MujerPedro Cañizares CuadraNo ratings yet
- Resumen 7 Habitos de Los Adolescentes Altamente ExitososDocument2 pagesResumen 7 Habitos de Los Adolescentes Altamente ExitososSergio García RamírezNo ratings yet
- Proyecto Geo 400 OficialDocument49 pagesProyecto Geo 400 OficialAlejandra SorucoNo ratings yet
- Postítulo de Mención en Necesidades Educativas EspecialesDocument22 pagesPostítulo de Mención en Necesidades Educativas EspecialesanaNo ratings yet
- UO - 01 Construcción de Poza de AceiteDocument6 pagesUO - 01 Construcción de Poza de Aceitejavier Mansilla GarayarNo ratings yet
- Workshop QuibblerDocument13 pagesWorkshop QuibblerAlexa RodriguezNo ratings yet
- Curso: EE354 Análisis de Sistemas de Potencia II: Escuela Profesional de Ingeniería EléctricaDocument21 pagesCurso: EE354 Análisis de Sistemas de Potencia II: Escuela Profesional de Ingeniería EléctricaULISES MARIANO MAYANGA MENDOZANo ratings yet
- Ppt-N°10 - La Familia y Los Alimentos-Curso - DoctrinaDocument13 pagesPpt-N°10 - La Familia y Los Alimentos-Curso - DoctrinaEnrique Jordan Laos Jaramillo100% (1)
- Aspectos Teoricos Del Abuso Sexual Infantil (1) .PpsDocument20 pagesAspectos Teoricos Del Abuso Sexual Infantil (1) .PpsDiana LoaizaNo ratings yet
- Cuidados de Enfermeria - PREOPARATORIODocument6 pagesCuidados de Enfermeria - PREOPARATORIOELIDA ABIGAIL PATILLA BALDEONNo ratings yet
- Tesis de Grado Valladolid... Marco TeoricoDocument66 pagesTesis de Grado Valladolid... Marco TeoricoElena MouwyNo ratings yet
- 6 Compromisos de Gestion Escolar para El 2016Document70 pages6 Compromisos de Gestion Escolar para El 2016ShirleyFelicitaMalcaFloresNo ratings yet
- Tarea 3 de Pruebas PsicométricasDocument4 pagesTarea 3 de Pruebas PsicométricasAna Paula Torres CoronaNo ratings yet
- Influencia. La psicología de la persuasiónFrom EverandInfluencia. La psicología de la persuasiónRating: 4.5 out of 5 stars4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressFrom EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressRating: 5 out of 5 stars5/5 (1)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroFrom EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroRating: 4 out of 5 stars4/5 (1)
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (87)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- Guía de aplicacion de la ISO 9001:2015From EverandGuía de aplicacion de la ISO 9001:2015Rating: 5 out of 5 stars5/5 (3)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoFrom EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoRating: 3.5 out of 5 stars3.5/5 (6)
- Cultura y clima: fundamentos para el cambio en la organizaciónFrom EverandCultura y clima: fundamentos para el cambio en la organizaciónNo ratings yet
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosFrom EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosRating: 4 out of 5 stars4/5 (16)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (117)
- Radiocomunicaciones: Teoría y principiosFrom EverandRadiocomunicaciones: Teoría y principiosRating: 5 out of 5 stars5/5 (3)
- Guía para la aplicación de ISO 9001 2015From EverandGuía para la aplicación de ISO 9001 2015Rating: 4 out of 5 stars4/5 (1)