You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Changseng2013 Tsunami Resilience Multi-Level Institution Arrangements Architectures and System of Governance For Disaster RiskDocument14 pagesChangseng2013 Tsunami Resilience Multi-Level Institution Arrangements Architectures and System of Governance For Disaster RiskAde ratihNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Location Selection of Dry Port based on AP Clustering - The Case of Southwest ChinaDocument11 pagesLocation Selection of Dry Port based on AP Clustering - The Case of Southwest ChinaAde ratihNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 17 Karczewski Piatek An Analysis of The RelationshipDocument6 pages17 Karczewski Piatek An Analysis of The RelationshipAde ratihNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Festen Purohit K. Feasibility of The Hub and Spoke Principle For LNG Supply Chains Into Northwest EuropeDocument100 pagesFesten Purohit K. Feasibility of The Hub and Spoke Principle For LNG Supply Chains Into Northwest EuropeAde ratihNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Raf RulesDocument25 pagesRaf RuleszyxNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Projects of Skunk Works - 75 Years of Lockheed Martin's Advanced Development ProgramsDocument523 pagesThe Projects of Skunk Works - 75 Years of Lockheed Martin's Advanced Development ProgramsAmerigo Zamper86% (7)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Diccionario Tecnico Ingles-EspañolDocument419 pagesDiccionario Tecnico Ingles-EspañolOlga Sandoval RomeroNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- CFD Assignment FinalDocument22 pagesCFD Assignment Finaldjtj89No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
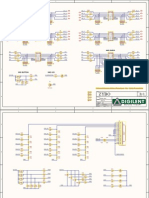
- PG 3 ZYBO - SCHDocument13 pagesPG 3 ZYBO - SCHanuptonemeNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- X30580ADocument147 pagesX30580AAbi Zain100% (1)
- Cat 2004Document258 pagesCat 2004agus rudiantoNo ratings yet
- Surveyor 1 A Preliminary ReportDocument46 pagesSurveyor 1 A Preliminary ReportBob Andrepont100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- PPL Lesson 5 OverviewDocument3 pagesPPL Lesson 5 OverviewShannon-claire McauleyNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Garmin GTN 625 Installation ManualDocument254 pagesGarmin GTN 625 Installation ManualRuth SantanaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Service and Safety Quality in US Airlines Pre - and Post-September 11thOKDocument11 pagesService and Safety Quality in US Airlines Pre - and Post-September 11thOKchrysobergiNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Faa Approved Airplane Flight Manual Supplement P/N 140-590039-0123 For Liebherr - Aerospace Digital Cabin Pressurization SystemDocument44 pagesFaa Approved Airplane Flight Manual Supplement P/N 140-590039-0123 For Liebherr - Aerospace Digital Cabin Pressurization SystemPatrick MbunguNo ratings yet
- Ship QuirksDocument2 pagesShip QuirksBrian100% (1)
- Historical Failures and The Evolution of Fracture Mechanics - LinkedIn PDFDocument10 pagesHistorical Failures and The Evolution of Fracture Mechanics - LinkedIn PDFmargi gajjarNo ratings yet
- Blade Tip Speed Ratio: BladesDocument3 pagesBlade Tip Speed Ratio: BladesWäśü RāđNo ratings yet
- Aircraft Accident Report and Executive SummaryDocument10 pagesAircraft Accident Report and Executive SummaryakeelNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Analysis of Different Voltage Follower Topologies in 90nm TechnologyDocument48 pagesAnalysis of Different Voltage Follower Topologies in 90nm TechnologyJay PadaliyaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- ZSYTDocument18 pagesZSYTjoker hotNo ratings yet
- Piper Archer II Checklist GuideDocument8 pagesPiper Archer II Checklist GuideJosías GenemNo ratings yet
- A320 Operating Manual PDF N FCOM RJA TF N EU 20130329 DSC 25 PDFDocument54 pagesA320 Operating Manual PDF N FCOM RJA TF N EU 20130329 DSC 25 PDFVincent ChanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Fnrs 1 Ficha TécnicaDocument2 pagesFnrs 1 Ficha TécnicaKevin ArteagaNo ratings yet
- 212MM212MMCH07Document8 pages212MM212MMCH07cristianNo ratings yet
- Cirrus: SR22 / SR22T WM Temporary Revision 31-60-02 Indicating/Recording SystemDocument3 pagesCirrus: SR22 / SR22T WM Temporary Revision 31-60-02 Indicating/Recording Systemmidun0% (1)
- Dynamics Notes PhysicsDocument116 pagesDynamics Notes PhysicsInaaya SiddiquiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Advanced Full Range Engine (AFRE) Program Envisions Hybrid Propulsion System Paving The Way To Routine, Reusable Hypersonic FlightDocument3 pagesAdvanced Full Range Engine (AFRE) Program Envisions Hybrid Propulsion System Paving The Way To Routine, Reusable Hypersonic FlightStephen TrimbleNo ratings yet
- Hoist and Winch CatalogDocument69 pagesHoist and Winch Catalogbaptista5989No ratings yet
- CMM 3-1527 - Main Wheel - (32-45-45) - Cessna 525Document91 pagesCMM 3-1527 - Main Wheel - (32-45-45) - Cessna 525Lucas AlvesNo ratings yet
- Exact Solutions To The Navier-Stokes EquationsDocument7 pagesExact Solutions To The Navier-Stokes EquationsMohamad KhairNo ratings yet
- Flying Guide Introduction: SIAI-Marchetti SF260 For FSXDocument23 pagesFlying Guide Introduction: SIAI-Marchetti SF260 For FSXGaius Appuleius DioclesNo ratings yet
- AOT Traffic Report-2019Document183 pagesAOT Traffic Report-2019Egsiam SaotonglangNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)