You might also like
- Digital Filter Design: Wang Weilian Wlwang@ynu - Edu.cn School of Information Science and Technology Yunnan UniversityDocument41 pagesDigital Filter Design: Wang Weilian Wlwang@ynu - Edu.cn School of Information Science and Technology Yunnan Universitysannu91No ratings yet
- DSP-5 (Iir) (S)Document55 pagesDSP-5 (Iir) (S)Jyothi JoNo ratings yet
- CIC Filter Introduction: Efficient Decimation and Interpolation Using Cascaded Integrator-Comb FiltersDocument7 pagesCIC Filter Introduction: Efficient Decimation and Interpolation Using Cascaded Integrator-Comb FiltersKaren JohannaNo ratings yet
- Design and Implementation of IIR FilterDocument45 pagesDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- National Taiwan University Term Paper on Notch FiltersDocument43 pagesNational Taiwan University Term Paper on Notch Filtersanand248No ratings yet
- Digital Signal Processing QUESTION BANKDocument5 pagesDigital Signal Processing QUESTION BANKSaran SekaranNo ratings yet
- Ch9 - IIR Digital Filter DesignDocument78 pagesCh9 - IIR Digital Filter Designkamal100% (2)
- Real-Time FIR Digital FiltersDocument56 pagesReal-Time FIR Digital FiltersullisrinuNo ratings yet
- Two Marks DSPDocument16 pagesTwo Marks DSPReeshma.GogulaNo ratings yet
- DSP Test Ii: Figure 2a An LCR FilterDocument5 pagesDSP Test Ii: Figure 2a An LCR FilterfidematNo ratings yet
- Digital Filter Design Using MatlabDocument41 pagesDigital Filter Design Using MatlabKirti Susan VargheseNo ratings yet
- Finite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7Document37 pagesFinite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7UsamaKhalidNo ratings yet
- High Resolution Delta-Sigma Adcs: Slide 1Document64 pagesHigh Resolution Delta-Sigma Adcs: Slide 1Sarawut PhetsilpNo ratings yet
- Teknik Perancangan Filter FIR dan IIRDocument63 pagesTeknik Perancangan Filter FIR dan IIRFakhri NugrahaNo ratings yet
- Digital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsDocument5 pagesDigital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsjpsridharNo ratings yet
- MultiRate 2Document178 pagesMultiRate 2IamINNo ratings yet
- Finite Impulse Response (Fir) : ObjectivesDocument9 pagesFinite Impulse Response (Fir) : ObjectivesAldon JimenezNo ratings yet
- DSP Lectures Full SetDocument126 pagesDSP Lectures Full SetAsad JaviedNo ratings yet
- 1 Basics DSP AV IntroDocument36 pages1 Basics DSP AV IntroUbaid UmarNo ratings yet
- Multirate Signal Processing PDFDocument45 pagesMultirate Signal Processing PDFajaipauloseNo ratings yet
- A/D and D/A Converter FundamentalsDocument18 pagesA/D and D/A Converter FundamentalskarkeraNo ratings yet
- 18ee63 DSP Module-3Document19 pages18ee63 DSP Module-3Appasabgouda BiradarNo ratings yet
- Unit I Two Marks:: Infinite Impulse Response Digital Filters & Unit-Iii: Finite Impulse Response Digital FiltersDocument3 pagesUnit I Two Marks:: Infinite Impulse Response Digital Filters & Unit-Iii: Finite Impulse Response Digital FiltersMoganambal MoganaNo ratings yet
- IIR Filter - Report: University of PisaDocument20 pagesIIR Filter - Report: University of PisaDuong Quynh GiangNo ratings yet
- Design of Audio Delta-Sigma A/D ConverterDocument17 pagesDesign of Audio Delta-Sigma A/D Converterhariprasath_vNo ratings yet
- Digital Signal Processing FundamentalsDocument15 pagesDigital Signal Processing FundamentalsPreetham SaigalNo ratings yet
- FIR Filter Design TechniquesDocument58 pagesFIR Filter Design TechniquesMubeen AhmedNo ratings yet
- Lab 5Document5 pagesLab 5Katiuvelis Diaz RodriguezNo ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Lab 2: Filter Design and Implementation: Objectives of This LabDocument10 pagesLab 2: Filter Design and Implementation: Objectives of This LabAzrinNo ratings yet
- Digital Signal Processing Question BankDocument4 pagesDigital Signal Processing Question BanksharlisreeNo ratings yet
- MTPPT9 - FIR and IIR Digital FiltersDocument14 pagesMTPPT9 - FIR and IIR Digital Filtersdanilyn joy AquinoNo ratings yet
- LAB 7: IIR Filter Design ObjectivesDocument13 pagesLAB 7: IIR Filter Design Objectivesmjrahimi.eee2020No ratings yet
- Design of M-Channel Pseudo Near Perfect Reconstruction QMF Bank For Image CompressionDocument9 pagesDesign of M-Channel Pseudo Near Perfect Reconstruction QMF Bank For Image CompressionsipijNo ratings yet
- AN540 - Implementacion de Filtros IIR Con Pic PDFDocument21 pagesAN540 - Implementacion de Filtros IIR Con Pic PDFluiscunzaNo ratings yet
- Design of 1st Order 1 bit Σ∆ ADC for AudioDocument10 pagesDesign of 1st Order 1 bit Σ∆ ADC for AudioNishant SinghNo ratings yet
- FIR Filter Kaiser WindowDocument16 pagesFIR Filter Kaiser WindowAshira JayaweeraNo ratings yet
- Frequency Offset Reduction Methods in OFDM: Behrouz Maham Dr. Said Nader-EsfahaniDocument59 pagesFrequency Offset Reduction Methods in OFDM: Behrouz Maham Dr. Said Nader-EsfahaniomjikumarpandeyNo ratings yet
- 9 HRTHDocument22 pages9 HRTHNithindev GuttikondaNo ratings yet
- S32104006W+Likando Mubita+DSP2022Document14 pagesS32104006W+Likando Mubita+DSP2022kaviyeluNo ratings yet
- 3F3 6 Design of IIR FiltersDocument44 pages3F3 6 Design of IIR FiltersAkanksha GargNo ratings yet
- Dspa Question BankDocument2 pagesDspa Question BankPanku RangareeNo ratings yet
- Question Bank: Subject Code: Subject NameDocument5 pagesQuestion Bank: Subject Code: Subject NamemsurendiranNo ratings yet
- IIR Digital Filter Structures Filter DesignDocument35 pagesIIR Digital Filter Structures Filter DesignMasterMathematicianNo ratings yet
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Digital Signal Processing Two MarksDocument11 pagesDigital Signal Processing Two MarksDelphin ShibinNo ratings yet
- 3 FIR Filter Design by YBP 01-09-2013Document44 pages3 FIR Filter Design by YBP 01-09-2013Pramiti ParasharNo ratings yet
- F0283111611-Ijsce Paper - SubirDocument5 pagesF0283111611-Ijsce Paper - SubirSubir MaityNo ratings yet
- SDR Paper 1Document6 pagesSDR Paper 1Weiluo YieNo ratings yet
- Complex Cascade FiltersDocument4 pagesComplex Cascade FiltersGolang InsightsNo ratings yet
- Module 5 - Multirate Signal Processing: Patrick A. NaylorDocument45 pagesModule 5 - Multirate Signal Processing: Patrick A. NaylorZainab A MaghrabyNo ratings yet
- Decimation Filtering For Complex Sigma Delta Analog To Digital Conversion in A Low-IF ReceiverDocument48 pagesDecimation Filtering For Complex Sigma Delta Analog To Digital Conversion in A Low-IF ReceiverSimyon PinskyNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Digital Signal Processing DemystifiedFrom EverandDigital Signal Processing DemystifiedRating: 4.5 out of 5 stars4.5/5 (8)
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Z Rakesh Varun Project Report1Document4 pagesZ Rakesh Varun Project Report1kenjo138No ratings yet
- An 455Document17 pagesAn 455jimmy200909No ratings yet
- LTE Cell Search 07117844Document10 pagesLTE Cell Search 07117844kenjo138No ratings yet
- PSS SSS LteDocument6 pagesPSS SSS Ltekenjo138No ratings yet
- Understanding Cascaded Integrator Comb FiltersDocument11 pagesUnderstanding Cascaded Integrator Comb Filterskenjo138No ratings yet
- How To Pack A Room of Analog FM Modulators Into A Xilinx FPGADocument6 pagesHow To Pack A Room of Analog FM Modulators Into A Xilinx FPGAkenjo138No ratings yet
- Gnuradiodoc 1Document6 pagesGnuradiodoc 1harigwrNo ratings yet
- Low Cost SDR Desktop DesignDocument15 pagesLow Cost SDR Desktop Designkenjo138No ratings yet
- Gnuradiodoc 1Document6 pagesGnuradiodoc 1harigwrNo ratings yet
- A High Performance Digital1 PDFDocument11 pagesA High Performance Digital1 PDFkenjo138No ratings yet
- Rtcweb 13 PDFDocument25 pagesRtcweb 13 PDFkenjo138No ratings yet
- Understanding cascaded integrator-comb (CIC) filtersDocument10 pagesUnderstanding cascaded integrator-comb (CIC) filterskenjo138No ratings yet
- FTC Training Manual: Running App Inventor Locally For Windows PcsDocument43 pagesFTC Training Manual: Running App Inventor Locally For Windows Pcskenjo138No ratings yet
- How To Pack A Room of Analog FM Modulators Into A Xilinx FPGADocument6 pagesHow To Pack A Room of Analog FM Modulators Into A Xilinx FPGAkenjo138No ratings yet
- Multi-Rate Signal Processing: Prof. Min WuDocument180 pagesMulti-Rate Signal Processing: Prof. Min WuIamINNo ratings yet
- CIC Filter IntroductionDocument6 pagesCIC Filter IntroductionvvigyaNo ratings yet
- Master Thesis Marcos Majo PDFDocument57 pagesMaster Thesis Marcos Majo PDFkenjo138No ratings yet
- Digi NotesDocument10 pagesDigi NotesSurya PrakashNo ratings yet
- Fpga SDR Carrier TimingDocument10 pagesFpga SDR Carrier TimingsinantasdokenNo ratings yet
- DSA Channel Sounding DissertationDocument181 pagesDSA Channel Sounding DissertationSaurabh BhandiwadNo ratings yet
- CIC filters overview: frequency response and implementation of comb-integrator filtersDocument14 pagesCIC filters overview: frequency response and implementation of comb-integrator filtersbrufoNo ratings yet
- Karve MP T 2010Document99 pagesKarve MP T 2010kenjo138No ratings yet
- DSA Channel Sounding DissertationDocument181 pagesDSA Channel Sounding DissertationSaurabh BhandiwadNo ratings yet
- Implementing A W-CDMA System With Altera Devices & IP FunctionsDocument20 pagesImplementing A W-CDMA System With Altera Devices & IP FunctionsAnovar_ebooksNo ratings yet
- Lec 18Document27 pagesLec 18kenjo138No ratings yet
- Lec 19Document34 pagesLec 19kenjo138No ratings yet
- Lec 30Document28 pagesLec 30kenjo138No ratings yet
- Lec 29Document28 pagesLec 29kenjo138No ratings yet
- CP441 eDocument250 pagesCP441 ebbudhdevNo ratings yet
- Rimage Advanced Setup GuideDocument34 pagesRimage Advanced Setup GuideChris AdamsNo ratings yet
- RMA ProcessDocument1 pageRMA ProcessAlexander GuarinNo ratings yet
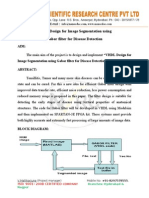
- VHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionDocument3 pagesVHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionNsrc Nano ScientifcNo ratings yet
- Geodatabase Topology Rules and Topology Error FixeDocument29 pagesGeodatabase Topology Rules and Topology Error FixeRahul DekaNo ratings yet
- Setupapi AppDocument25 pagesSetupapi AppRsam SamrNo ratings yet
- Blockchian Cheat SheetDocument1 pageBlockchian Cheat SheetSanjay S RayNo ratings yet
- ME2L Step-By-step GUIDE - Display A List of POsDocument17 pagesME2L Step-By-step GUIDE - Display A List of POs111adams1110% (1)
- ENDORSEMENT LETTER Ojt 2022Document2 pagesENDORSEMENT LETTER Ojt 2022Jam MaribojocNo ratings yet
- AM TOGAF Quick Reference Charts PDFDocument21 pagesAM TOGAF Quick Reference Charts PDFKrishna Marconi100% (1)
- Hipath 1100 Hipath 1120 Hipath 1150 Hipath 1190: Analog MF Telephones Programming ManualDocument241 pagesHipath 1100 Hipath 1120 Hipath 1150 Hipath 1190: Analog MF Telephones Programming ManualMaria StoicaNo ratings yet
- Multimedia Project StagesDocument12 pagesMultimedia Project StagesMuhammad TahaNo ratings yet
- Frequent Itemset MiningDocument58 pagesFrequent Itemset MiningMesut ErkekliNo ratings yet
- Chapter 6: Implementing Group Policy (Presentation)Document30 pagesChapter 6: Implementing Group Policy (Presentation)Muhammad Iqrash Awan100% (1)
- OOAD Lab Manual for CS2357 (CSE III YearDocument138 pagesOOAD Lab Manual for CS2357 (CSE III YearKarthik KeyanNo ratings yet
- Google Earth y Civil CadDocument3 pagesGoogle Earth y Civil CadRodneyNo ratings yet
- Research Proposal For Consumer Behaviour Toward Online Shopping in Bhimtal RegionDocument5 pagesResearch Proposal For Consumer Behaviour Toward Online Shopping in Bhimtal RegionDark LordNo ratings yet
- Uses of InternetDocument11 pagesUses of InternetMantashaNo ratings yet
- Rodec cx-1100Document27 pagesRodec cx-1100spinolNo ratings yet
- RadioDJ - How To Use A Mixer With RadioDJ - RadioDJ - Free Radio Automation SoftwareDocument2 pagesRadioDJ - How To Use A Mixer With RadioDJ - RadioDJ - Free Radio Automation SoftwarePatito FeoNo ratings yet
- Ip Addressing and Subnetting WorkshopDocument33 pagesIp Addressing and Subnetting WorkshopSachin SadadekarNo ratings yet
- Aditya Sharma PPT HDFCDocument49 pagesAditya Sharma PPT HDFCharsh shuklaNo ratings yet
- PS 1 PDFDocument2 pagesPS 1 PDFcihirNo ratings yet
- Manohara Profile Lab Support EngineerDocument3 pagesManohara Profile Lab Support EngineerGiduthuri AdityaNo ratings yet
- Factoring Polynomials by Grouping Pt. 1Document24 pagesFactoring Polynomials by Grouping Pt. 1ColtonThomasNo ratings yet
- Top 50 Mainframe Interview Questions & Answers PDFDocument11 pagesTop 50 Mainframe Interview Questions & Answers PDFasriramanathanNo ratings yet
- 106106140Document2 pages106106140A vyasNo ratings yet
- Crystal e PortfolioDocument64 pagesCrystal e Portfolio452bobNo ratings yet
- Dynamic PricingDocument9 pagesDynamic PricingkoolboyankitNo ratings yet
- Welding RobotDocument2 pagesWelding RobotengrodeNo ratings yet