
You might also like
- CIDSDocument1 pageCIDSCaŔlo AndreNo ratings yet
- MaterialesDocument13 pagesMaterialesCaŔlo AndreNo ratings yet
- Cuestionario Electronica 5toDocument8 pagesCuestionario Electronica 5toCaŔlo AndreNo ratings yet
- Practica 5 MicrocontroladoresDocument8 pagesPractica 5 MicrocontroladoresCaŔlo AndreNo ratings yet
- Calculo de Actuaciones de Aeronave Parte 1Document18 pagesCalculo de Actuaciones de Aeronave Parte 1CaŔlo Andre100% (1)
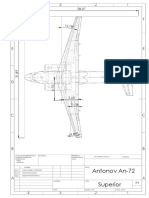
- Planos Antonov 72Document3 pagesPlanos Antonov 72CaŔlo AndreNo ratings yet
- Pieza 0000006527097 PDFDocument3 pagesPieza 0000006527097 PDFCaŔlo AndreNo ratings yet
- Estructuras de Pared DelgadaDocument1 pageEstructuras de Pared DelgadaCaŔlo AndreNo ratings yet
- CuOrdoñez-Carlo Andre-7AV3-TercerDepartamentalDocument22 pagesCuOrdoñez-Carlo Andre-7AV3-TercerDepartamentalCaŔlo AndreNo ratings yet
- AI6 Cardenas Dominguez Francisco Javier M17C4G17-BB-032Document15 pagesAI6 Cardenas Dominguez Francisco Javier M17C4G17-BB-032CaŔlo AndreNo ratings yet
- Financiamiento de Los ProyectosDocument8 pagesFinanciamiento de Los ProyectosCristian Alberto MartínezNo ratings yet
- Igualdades Diferencias Ventajas y Desventajas Entre Los Modelos OSI y TCPIPDocument25 pagesIgualdades Diferencias Ventajas y Desventajas Entre Los Modelos OSI y TCPIPGerson Camacho C0% (1)
- 1Document4 pages1MariaNo ratings yet
- López Piñero, Química y Medicina. Paracelso 1972Document22 pagesLópez Piñero, Química y Medicina. Paracelso 1972aguilafuenteNo ratings yet
- 11-Sistema de Endomembranas-Apunte GeneralDocument19 pages11-Sistema de Endomembranas-Apunte GeneralTomas Scialfa BenderskyNo ratings yet
- Em2 - E11 - 2003 CadenasDocument14 pagesEm2 - E11 - 2003 CadenasSebastián Andrés Rojas MontielNo ratings yet
- Efluentes MataderoDocument23 pagesEfluentes MataderoRamon Cruz Mamani50% (2)
- Milpa - Alta SemujeresDocument6 pagesMilpa - Alta Semujereslorenzo gutierrezNo ratings yet
- Problemas Sobre La Auto Inductancia e Inductancia MutuaDocument3 pagesProblemas Sobre La Auto Inductancia e Inductancia MutuaCesar FloresNo ratings yet
- Guia Taller El Arbol de La VidaDocument6 pagesGuia Taller El Arbol de La VidaPablo RiosNo ratings yet
- Características de La Edad MediaDocument5 pagesCaracterísticas de La Edad MediaFergie NandaNo ratings yet
- Resumen Final SociologiaDocument8 pagesResumen Final SociologiaEmanuel SarquisNo ratings yet
- Xirau, Ramón-El Péndulo y La Espiral-El Colegio Nacional (1994)Document135 pagesXirau, Ramón-El Péndulo y La Espiral-El Colegio Nacional (1994)Roberto Perez100% (1)
- Cardiopatías CongénitasDocument29 pagesCardiopatías CongénitasEABG0% (1)
- AlicorpDocument6 pagesAlicorpCristhian JoelNo ratings yet
- Semana 9 - Ecorregiones - Parques NacDocument11 pagesSemana 9 - Ecorregiones - Parques NacYEFER YOSUAP ESPILLICO PONGONo ratings yet
- Especificaciones de Cal Viva para Propositos Estructurales 1Document2 pagesEspecificaciones de Cal Viva para Propositos Estructurales 1jose antonioNo ratings yet
- Tema 18 Cirugía PreprotésicaDocument31 pagesTema 18 Cirugía PreprotésicaJ. Antonio Mestas R.100% (1)
- Práctico 5 TermoquímicaDocument3 pagesPráctico 5 TermoquímicaAngélica R.No ratings yet
- Catalogo Steel Complements 2019Document40 pagesCatalogo Steel Complements 2019shaggy0078100% (1)
- Mapa de Procesos Bimbo de Colombia S.A.Document5 pagesMapa de Procesos Bimbo de Colombia S.A.Carlos BecerraNo ratings yet
- Formato Densidad de Campo - Bahia L-1132 Kiman Ayllu, BSL, BTC-T, BTC-S, BTC-RDocument4 pagesFormato Densidad de Campo - Bahia L-1132 Kiman Ayllu, BSL, BTC-T, BTC-S, BTC-RLuis Mariano Villavicencio UbillusNo ratings yet
- Proyecto Interdisciplinar Cientifico 5Document27 pagesProyecto Interdisciplinar Cientifico 5J 999No ratings yet
- Sesión 3.1. - Producto EscalarDocument6 pagesSesión 3.1. - Producto EscalarUno DosNo ratings yet
- Ejemplo de Investigación de MercadoDocument5 pagesEjemplo de Investigación de MercadoEnry VasquezNo ratings yet
- Problemas KinesiológicosDocument11 pagesProblemas KinesiológicosAraah LeriNo ratings yet
- Calculo Cimentacion de PosteDocument8 pagesCalculo Cimentacion de PosteJose Caceres100% (2)
- 1°? Enero Educación Física (2021-2022)Document5 pages1°? Enero Educación Física (2021-2022)Axel HernándezNo ratings yet
- Hiperónimos, Hipónimos y CohipónimosDocument22 pagesHiperónimos, Hipónimos y CohipónimosHEIDY KAROLINA HERNANDEZ ENAMORADONo ratings yet
- Monografía HUANCAYODocument105 pagesMonografía HUANCAYOTrabajos Calle 3100% (1)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleFrom EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleRating: 5 out of 5 stars5/5 (3)
- Guía práctica para la refracción ocularFrom EverandGuía práctica para la refracción ocularRating: 5 out of 5 stars5/5 (2)
- Armónicas en Sistemas Eléctricos IndustrialesFrom EverandArmónicas en Sistemas Eléctricos IndustrialesRating: 4.5 out of 5 stars4.5/5 (12)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalFrom EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalRating: 5 out of 5 stars5/5 (3)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiFrom EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiRating: 3.5 out of 5 stars3.5/5 (5)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraFrom EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraRating: 4.5 out of 5 stars4.5/5 (5)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaFrom EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaRating: 4 out of 5 stars4/5 (32)
- Razonamiento Lógico Matemático para la toma de decisionesFrom EverandRazonamiento Lógico Matemático para la toma de decisionesRating: 4.5 out of 5 stars4.5/5 (8)














































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-1-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)











