You might also like
- Kinematics and Dynamics of The Heavy VehicleDocument38 pagesKinematics and Dynamics of The Heavy VehicleJhonatan CondoriNo ratings yet
- RE-AASTU-PP-3 - Track Design PDFDocument52 pagesRE-AASTU-PP-3 - Track Design PDFnatnaelNo ratings yet
- 19A301 ReportDocument7 pages19A301 ReportAbrajith MNo ratings yet
- Swerve Drive Autonomous Robot For Tiles Thermographic InspectionDocument11 pagesSwerve Drive Autonomous Robot For Tiles Thermographic InspectionHumberto RodríguezNo ratings yet
- A Tutorial On Autonomous Vehicle Steering Controller Design, Simulation and ImplementationDocument22 pagesA Tutorial On Autonomous Vehicle Steering Controller Design, Simulation and Implementationbula69No ratings yet
- Module 4 PDV CharacteristicsDocument11 pagesModule 4 PDV CharacteristicsAldrin CruzNo ratings yet
- Ysics For Ngineering Echnologists: PH E TDocument92 pagesYsics For Ngineering Echnologists: PH E TRodnie John Paul SevillaNo ratings yet
- Weiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangDocument6 pagesWeiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangMohd SolihinNo ratings yet
- GRP 3 Characteristics of The Driver The Pedestrian The Vehicle and The RoadDocument78 pagesGRP 3 Characteristics of The Driver The Pedestrian The Vehicle and The RoadKevin SalzalNo ratings yet
- Icae-7 G14Document6 pagesIcae-7 G14Max CastroNo ratings yet
- 4 VehicleDocument9 pages4 VehicleMohannad S ZebariNo ratings yet
- CVEN2401 Week9 (1) Horizontal Alignment Part 2 UpdatedDocument40 pagesCVEN2401 Week9 (1) Horizontal Alignment Part 2 UpdatedMichael BoutsalisNo ratings yet
- Lecture 01Document25 pagesLecture 01Zarnain khanNo ratings yet
- Modeling and Design of Longitudinal and Lateral Control System With A Feed Forward Controller For A 4 Wheeled RobotDocument18 pagesModeling and Design of Longitudinal and Lateral Control System With A Feed Forward Controller For A 4 Wheeled RobotJames MorenoNo ratings yet
- Vehicle Dynamics and Modelling: Tractive EffortDocument8 pagesVehicle Dynamics and Modelling: Tractive EffortKrishi ShahNo ratings yet
- Final Report - 575Document10 pagesFinal Report - 575MochFakhrulNo ratings yet
- Lectures 16 & 17Document24 pagesLectures 16 & 17ce23m409No ratings yet
- ..Optimal Vibration Control For Tracked Vehicle Suspension SystemsDocument8 pages..Optimal Vibration Control For Tracked Vehicle Suspension SystemshafizahNo ratings yet
- Momentum and Energy LQ CC NGSSDocument4 pagesMomentum and Energy LQ CC NGSSconstantine1106No ratings yet
- An Effective Approach For Dynamic AnalysDocument27 pagesAn Effective Approach For Dynamic AnalysagmyatsanNo ratings yet
- Rules Requirements 2019: Analytical PartDocument16 pagesRules Requirements 2019: Analytical PartLuis M. BalderasNo ratings yet
- Jsir 65 (3) 213-226 PDFDocument14 pagesJsir 65 (3) 213-226 PDFmaheshnagarkarNo ratings yet
- eduMIP ReportDocument48 pageseduMIP ReportmarcosfidelmeraNo ratings yet
- 8 Total TrafficDocument98 pages8 Total TrafficHozayen HozayenNo ratings yet
- Scaled Vehicle Cornering StiffnessDocument5 pagesScaled Vehicle Cornering Stiffnessandi suntoroNo ratings yet
- Lecture 04Document38 pagesLecture 04Thomas GiannoneNo ratings yet
- Adityo 2020 J. Phys. Conf. Ser. 1511 012074Document11 pagesAdityo 2020 J. Phys. Conf. Ser. 1511 012074HendratoNo ratings yet
- Quadrotor Trajectory Tracking Using PID Cascade ControlDocument7 pagesQuadrotor Trajectory Tracking Using PID Cascade ControlNeide AparecidaNo ratings yet
- Design of Self-Balancing Bike System Based On AutoDocument6 pagesDesign of Self-Balancing Bike System Based On Autosmppygx8jdNo ratings yet
- CIVENG 4TA4 Traffic AnalysisDocument38 pagesCIVENG 4TA4 Traffic AnalysishaniNo ratings yet
- Lab Report 4Document3 pagesLab Report 4Hassan MehmoodNo ratings yet
- Research Collection: Comprehensive Locomotion Performance Evaluation of All-Terrain RobotsDocument7 pagesResearch Collection: Comprehensive Locomotion Performance Evaluation of All-Terrain RobotsNishit PachpandeNo ratings yet
- Mathematical Modeling of Quadcopter DynamicsDocument14 pagesMathematical Modeling of Quadcopter DynamicsSamuel MergaNo ratings yet
- Rollover Stability Analysis of Commercial VehicleDocument6 pagesRollover Stability Analysis of Commercial VehicleMohd SolihinNo ratings yet
- Document From Bicky AgarwalDocument73 pagesDocument From Bicky Agarwalbicky agarwalNo ratings yet
- Variable Ratio Control Strategy For A Rear Wheel Active SteeringDocument13 pagesVariable Ratio Control Strategy For A Rear Wheel Active SteeringBerkay ÇelikNo ratings yet
- ASME Ali Kıvanç Ersan Final PDFDocument10 pagesASME Ali Kıvanç Ersan Final PDFaliNo ratings yet
- Randomwebsite Ref (Rms Torque)Document5 pagesRandomwebsite Ref (Rms Torque)Robotics LabNo ratings yet
- IN 2020 AkashDocument12 pagesIN 2020 AkashSriram SundarNo ratings yet
- A Safety-Focused Vehicle Driving Strategy Towards Minimal Injury Severity in Imminent Collision ScenariosDocument4 pagesA Safety-Focused Vehicle Driving Strategy Towards Minimal Injury Severity in Imminent Collision ScenariosDeepsNo ratings yet
- Lab - 4 - Momentum - Energy - Docx FilenameDocument4 pagesLab - 4 - Momentum - Energy - Docx FilenameClive BurnettNo ratings yet
- Traffic Engineering-Lecture 1Document10 pagesTraffic Engineering-Lecture 1Ahmad Salih100% (1)
- Student Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersDocument33 pagesStudent Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersPruebaNo ratings yet
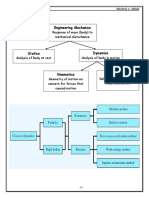
- Engineering Mechanics: Response of Mass (Body) To Mechanical DisturbanceDocument13 pagesEngineering Mechanics: Response of Mass (Body) To Mechanical DisturbancesbkjasbfaskjfbjkNo ratings yet
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- ME303 Wk02 Kinematics Load Determination PDFDocument23 pagesME303 Wk02 Kinematics Load Determination PDF许戎汉No ratings yet
- Nikhil PawarDocument16 pagesNikhil PawarNikhil PawarNo ratings yet
- Lect6 9Document17 pagesLect6 9ahmadNo ratings yet
- Longitudinal Vehicle DynamicsDocument6 pagesLongitudinal Vehicle Dynamicslicks.vinicius1649No ratings yet
- Mathematical Modelling of Multirotor UAVDocument6 pagesMathematical Modelling of Multirotor UAVchernet tayeNo ratings yet
- P1 - L1 - Montion in 1 DimensionDocument28 pagesP1 - L1 - Montion in 1 Dimension24 Giang Ngọc Phương ThanhNo ratings yet
- Feedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotDocument19 pagesFeedforward Control System Development and Implementation For Longitudinal and Lateral Motion of A Four-Wheeled RobotAnonymous lVQ83F8mCNo ratings yet
- Calculation Report FinalDocument62 pagesCalculation Report FinalJethro JeyarajNo ratings yet
- p6 in GeneralDocument14 pagesp6 in Generalanthonyvergara141990No ratings yet
- Geometric Design of HighwayDocument11 pagesGeometric Design of HighwayADRIAN FRAGATANo ratings yet
- Optimum Gear Ratios For An Electric Vehicle PDFDocument15 pagesOptimum Gear Ratios For An Electric Vehicle PDFharshalvikasNo ratings yet
- Design and Fabrication of A Motorized Prototype TR PDFDocument4 pagesDesign and Fabrication of A Motorized Prototype TR PDFnurul taqwaNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Guidelines On Workplace Traffic Safety ManagementDocument22 pagesGuidelines On Workplace Traffic Safety Managementr_sadekarNo ratings yet
- Fault Codes: Engine ElectronicsDocument14 pagesFault Codes: Engine ElectronicsSTO UAndriivNo ratings yet
- Transportation Logistics PoliciesDocument14 pagesTransportation Logistics PoliciesMohammad ElkhatibNo ratings yet
- Nearmiss Report Uncoupling Trailer W #13Document15 pagesNearmiss Report Uncoupling Trailer W #13Alok SinghNo ratings yet
- 14.3. Toolbox Talk RegisterDocument25 pages14.3. Toolbox Talk RegistersimoneNo ratings yet
- Trailer DesignDocument14 pagesTrailer Designankushwre100% (1)
- Aar A (2012)Document84 pagesAar A (2012)Rogerio Tropia GranjaNo ratings yet
- WC Sports 10p 050213Document10 pagesWC Sports 10p 050213Baragrey DaveNo ratings yet
- Risk Assessment For General ActivitiesDocument25 pagesRisk Assessment For General Activitiesabou bakar67% (3)
- MM Ottawa T2 FinalDocument262 pagesMM Ottawa T2 FinalAbdellah Askarne100% (2)
- Chapter 8 Ro-Ro ShipsDocument8 pagesChapter 8 Ro-Ro ShipsJeet SinghNo ratings yet
- 5x8 Utility Trailer PlansDocument32 pages5x8 Utility Trailer PlansEllyn Mohd100% (3)
- 77ATX Brochure 2012Document4 pages77ATX Brochure 2012Silvia De Pedro CamoeirasNo ratings yet
- 800 Manual de Servicio PDFDocument402 pages800 Manual de Servicio PDFmarcol705No ratings yet
- BMW Leisure Travel Magazine enDocument11 pagesBMW Leisure Travel Magazine enLaurentiu PavelescuNo ratings yet
- New Holland DC150.B (Tier 2) Crawler Dozer Service Repair ManualDocument21 pagesNew Holland DC150.B (Tier 2) Crawler Dozer Service Repair ManualggjjjjotonesNo ratings yet
- The SPMT Trailer1Document38 pagesThe SPMT Trailer1Anwar ShanNo ratings yet
- Nivek Product CatalogueDocument9 pagesNivek Product CatalogueAndhy AksaNo ratings yet
- Standard Operating ProceduresDocument5 pagesStandard Operating ProceduresDominic Kibet-TooNo ratings yet
- Dicth Witch FX30-ManualDocument135 pagesDicth Witch FX30-ManualEdwin HarrisNo ratings yet
- MSRP A1 PDFDocument92 pagesMSRP A1 PDFFelora Mangawang100% (1)
- Australian Made Pick Up Camper Company Trayon Campers Go InternationalDocument3 pagesAustralian Made Pick Up Camper Company Trayon Campers Go InternationalPR.comNo ratings yet
- Recall n45Document19 pagesRecall n45Paul PhillipsNo ratings yet
- BT Rolatruc - RR b2-15 - Maderas M.GDocument456 pagesBT Rolatruc - RR b2-15 - Maderas M.GMarcos Garcia Salas93% (15)
- DAF CF Emergency Response Guide CF PUB00775 1 enDocument42 pagesDAF CF Emergency Response Guide CF PUB00775 1 enStefan CristeaNo ratings yet
- TM 5-9084 - Converto Dumping TrailerDocument21 pagesTM 5-9084 - Converto Dumping TrailerHornet133No ratings yet
- Maquinas de HidrosiembraDocument37 pagesMaquinas de HidrosiembraDiego LabarcaNo ratings yet
- Ottawa Yard TruckDocument68 pagesOttawa Yard TruckASHLYN PRICENo ratings yet
- Zapatas y Fricciones Meritor PDFDocument66 pagesZapatas y Fricciones Meritor PDFKathia Perez M.No ratings yet