You might also like
- Programming Cat® Electronic Truck EngineDocument258 pagesProgramming Cat® Electronic Truck EngineDuy Kha95% (108)
- Spare Parts Book Hiab h033tDocument144 pagesSpare Parts Book Hiab h033tetradorsorensic100% (4)
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- Volvo Trucks North America Fuel System Design and FunctionDocument12 pagesVolvo Trucks North America Fuel System Design and FunctionEduardo Pai Tocarlo90% (40)
- Service Manual HA12IPDocument278 pagesService Manual HA12IPgeorgel.ghitaNo ratings yet
- 475-091744 Rev - C - Manual - Ops and ServiceDocument119 pages475-091744 Rev - C - Manual - Ops and ServiceBrandon HernandezNo ratings yet
- Manual de Operaci - N Link - Belt PDFDocument232 pagesManual de Operaci - N Link - Belt PDFana mileidy castañedaNo ratings yet
- V706-Spare Parts ManualDocument101 pagesV706-Spare Parts ManualGustavo AstudilloNo ratings yet
- Carrier Carrier Carrier Crawler Carrier CarrierDocument2 pagesCarrier Carrier Carrier Crawler Carrier CarrierBaggerkingNo ratings yet
- Axle KesslerDocument588 pagesAxle KesslerBoran CarmonaNo ratings yet
- Hiab 320Document152 pagesHiab 320Jasbir Jammu Repairing & Maintence LLCNo ratings yet
- Speeduino Manual: Install, Configure & Use Open-Source Engine ManagementDocument58 pagesSpeeduino Manual: Install, Configure & Use Open-Source Engine Managementgiapy0000No ratings yet
- Business Analyst TrainingDocument3 pagesBusiness Analyst TrainingMuniswamaiah Mohan100% (1)
- BHEL Turbine ManualDocument58 pagesBHEL Turbine Manualnivasssv75% (4)
- THPS DegradationDocument5 pagesTHPS DegradationAhmad Naim KhairudinNo ratings yet
- Analysis of Rack and Pinion Using AnsysDocument21 pagesAnalysis of Rack and Pinion Using AnsysTejas Prakash100% (1)
- Repair Instruction Hydraulic Loader Crane: Exchange Scanreco Radio Remote Control RC400/P1 To RC400/P2Document23 pagesRepair Instruction Hydraulic Loader Crane: Exchange Scanreco Radio Remote Control RC400/P1 To RC400/P2Paweł B100% (1)
- Parts Manual for ZT20J (ZT68J) Telescopic Boom LiftDocument183 pagesParts Manual for ZT20J (ZT68J) Telescopic Boom LiftLuis AlbertoAlmeidaSilvaNo ratings yet
- Nacela Service Manual h14tx h16tpxDocument272 pagesNacela Service Manual h14tx h16tpxGules GheorgheNo ratings yet
- FASSI Crane Use and Maintenance ManualDocument80 pagesFASSI Crane Use and Maintenance ManualSaulius KlimkeviciusNo ratings yet
- AC50-1 Data SheetDocument18 pagesAC50-1 Data SheetJonp4ul_MiddletonNo ratings yet
- A46JE SnorkelDocument2 pagesA46JE SnorkelDaniel CringusNo ratings yet
- Manual de Partes jlg860sDocument270 pagesManual de Partes jlg860siori yagamiNo ratings yet
- PK24001 High Performance Cost-Efficient All-Rounder Knuckle-Boom CraneDocument2 pagesPK24001 High Performance Cost-Efficient All-Rounder Knuckle-Boom CraneHeiner JaimesNo ratings yet
- Vzwkuawpwai1huldterex-Demag Ac 50-1 All Terrain Crane NetworkDocument14 pagesVzwkuawpwai1huldterex-Demag Ac 50-1 All Terrain Crane NetworkSameh MohamedNo ratings yet
- Danfoss - PVG32: Linear LeversDocument2 pagesDanfoss - PVG32: Linear LeversNovakurniawanNo ratings yet
- Demag AC25Document12 pagesDemag AC25Mgc Elektronik100% (1)
- Mobile crane LTM 1050-3.1 specs: 50t lift, 54m height, 44m radiusDocument16 pagesMobile crane LTM 1050-3.1 specs: 50t lift, 54m height, 44m radiusSodo ANo ratings yet
- Adjustment of Extensions HIABDocument4 pagesAdjustment of Extensions HIABEDUARDO VEGANo ratings yet
- 2 En1Document90 pages2 En1Ngà NguyễnNo ratings yet
- Operation & Safety Manual: Agrovector 29.6LP, 29.6 & 35.7Document158 pagesOperation & Safety Manual: Agrovector 29.6LP, 29.6 & 35.7duongpnNo ratings yet
- New Holland TC29DA, TC33DA Service Repair ManualDocument21 pagesNew Holland TC29DA, TC33DA Service Repair ManualggjjjjotonesNo ratings yet
- 547638en 1.0.0 1600325824Document126 pages547638en 1.0.0 1600325824Polished AllNo ratings yet
- A350-40691 - Rev02 EN13000Document38 pagesA350-40691 - Rev02 EN13000Waleed LemsilkhiNo ratings yet
- Sauer-Danfoss Mcx103b D Rotary Position Sensor TechnicalDocument8 pagesSauer-Danfoss Mcx103b D Rotary Position Sensor TechnicalJosé Fidencio Carrillo Moreno0% (1)
- SCHEMA HYDRAULIQUE TN122 159P325420 Ind B HA41PX GEMINI PDFDocument3 pagesSCHEMA HYDRAULIQUE TN122 159P325420 Ind B HA41PX GEMINI PDFHanin Bouziane100% (1)
- JLG-860SJ - enDocument142 pagesJLG-860SJ - enArgopartsNo ratings yet
- CC! Document AnalysisDocument42 pagesCC! Document AnalysisAlba Precoma Mojarro100% (1)
- H18SX Maintenancer ManualDocument120 pagesH18SX Maintenancer ManualHeavy Equipment Parts ExpertNo ratings yet
- I-Flex System Error Code Data Error Code Error Possible Cause Elimination E01Document10 pagesI-Flex System Error Code Data Error Code Error Possible Cause Elimination E01vitor santosNo ratings yet
- T 220Document54 pagesT 220Claudio RussoNo ratings yet
- Technical Proposal ECrane 1000 Series EH7359Document16 pagesTechnical Proposal ECrane 1000 Series EH7359Satrio Agung WijonarkoNo ratings yet
- TadanoDocument9 pagesTadanoFATCHURNo ratings yet
- Ac400 PDFDocument26 pagesAc400 PDFGoutam HotaNo ratings yet
- E17 E19 E20 en BrochureDocument12 pagesE17 E19 E20 en Brochurepedrorainha2537No ratings yet
- 4017rs 3614rsDocument662 pages4017rs 3614rsSebastian GeraciNo ratings yet
- JLG 450aj SiiDocument312 pagesJLG 450aj SiiLloydNo ratings yet
- 72 516 PDFDocument65 pages72 516 PDFJITENDRA KUMAR SHARMANo ratings yet
- Transmission: Section F Section FDocument1 pageTransmission: Section F Section FSzabolcs Ignátisin0% (1)
- HIAB Safety Codes 042014Document14 pagesHIAB Safety Codes 042014Anthony David Martínez VallejoNo ratings yet
- Tms800e13-T4 SM CTRL496-00 PDFDocument382 pagesTms800e13-T4 SM CTRL496-00 PDFIsmael GarciaNo ratings yet
- Tabela Especial Guindastes PDFDocument305 pagesTabela Especial Guindastes PDFmiguelangel314No ratings yet
- md0000001178202007 PM 221650 RT760E 002 PARTSDocument899 pagesmd0000001178202007 PM 221650 RT760E 002 PARTSDecomaderas SanchezNo ratings yet
- Technical Data LHM 550Document10 pagesTechnical Data LHM 550Amine Dhahri100% (1)
- Hiab Loader Crane Za 200-175 Parts CatalogueDocument82 pagesHiab Loader Crane Za 200-175 Parts CatalogueKobelco RepairNo ratings yet
- Steering Column and Attaching Parts (Figure 7-1) : Unit Code L177 Europe 06/2005Document15 pagesSteering Column and Attaching Parts (Figure 7-1) : Unit Code L177 Europe 06/2005Melwyn FernandesNo ratings yet
- Field Testing of A Closed Loop PumpDocument4 pagesField Testing of A Closed Loop Pumpmagarmat1980No ratings yet
- Grove Hydraulics: Americas TrainingDocument17 pagesGrove Hydraulics: Americas TrainingMauro AntihualNo ratings yet
- Product Guide: Rough Terrain Hydraulic CraneDocument12 pagesProduct Guide: Rough Terrain Hydraulic CraneMUKESH KUSHWAHA GULARBAGANo ratings yet
- GR-600EX: M OdelDocument21 pagesGR-600EX: M OdelJon Pio DinopolNo ratings yet
- Replacing Seals on KP 30 Hydraulic PumpsDocument174 pagesReplacing Seals on KP 30 Hydraulic PumpsSergeyNo ratings yet
- Installation Manual SP2720-1 Rev0Document64 pagesInstallation Manual SP2720-1 Rev0Augusto RezendeNo ratings yet
- 980A0166Document38 pages980A0166Michael DavenportNo ratings yet
- Ha12cj Training ManualDocument123 pagesHa12cj Training ManualP G100% (1)
- MF COMPACT-OPTIMUM EN E03.12Document102 pagesMF COMPACT-OPTIMUM EN E03.12felix camusNo ratings yet
- Lb-Aw-Rac-Man Tps enDocument50 pagesLb-Aw-Rac-Man Tps enWaldir Donatti JuniorNo ratings yet
- Lb-Aw-Rac-Man CMT enDocument50 pagesLb-Aw-Rac-Man CMT enWaldir Donatti JuniorNo ratings yet
- Bosch System Basis Chip Cy329 Product SummaryDocument6 pagesBosch System Basis Chip Cy329 Product SummaryPijai TDMNo ratings yet
- PLC Overview 4104euen0802Document40 pagesPLC Overview 4104euen0802Jeevan JyotiNo ratings yet
- Pinout Denso Hyundai Megatruck2010Document1 pagePinout Denso Hyundai Megatruck2010giapy0000No ratings yet
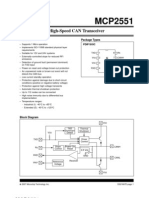
- MCP 2551Document24 pagesMCP 2551senguttuvelNo ratings yet
- L Series: Engineered To SaveDocument8 pagesL Series: Engineered To Savegiapy0000No ratings yet
- VOLVO 7748542 US Installation EMS 2 D13 PDFDocument62 pagesVOLVO 7748542 US Installation EMS 2 D13 PDFSIVARAMANJAGANATHANNo ratings yet
- Electric Diagram For SR-250 Upper1Document1 pageElectric Diagram For SR-250 Upper1giapy0000No ratings yet
- 25 MR-100 Hyd-DiagDocument1 page25 MR-100 Hyd-Diaggiapy0000No ratings yet
- Manual de Partes Del Motor Cat c9Document127 pagesManual de Partes Del Motor Cat c9jalb80% (5)
- Manualegcp2 26174 BDocument234 pagesManualegcp2 26174 BINGRgomezNo ratings yet
- 6068hf 485 Manual-EngineDocument160 pages6068hf 485 Manual-Enginegiapy0000No ratings yet
- Ic 900 PDFDocument100 pagesIc 900 PDFShubra DebNo ratings yet
- Manual Pic 18F2550Document430 pagesManual Pic 18F2550Pancho NuncioNo ratings yet
- User'S Manual: PIC-P26J50 Proto Development BoardDocument19 pagesUser'S Manual: PIC-P26J50 Proto Development Boardgiapy0000100% (1)
- Pic 14000Document153 pagesPic 14000MarkoStankovicNo ratings yet
- Koler Power Systems 20 - 2000kW - Operation - Manual PDFDocument80 pagesKoler Power Systems 20 - 2000kW - Operation - Manual PDFTấn Dũng BùiNo ratings yet
- Preamp PDFDocument1 pagePreamp PDFgiapy0000No ratings yet
- Speeduino Manual PDFDocument58 pagesSpeeduino Manual PDFgiapy0000No ratings yet
- Gold Capacitors: Electric Double Layer CapacitorsDocument28 pagesGold Capacitors: Electric Double Layer Capacitorsgiapy0000No ratings yet
- 275kw Diesel Generator Datasheet J275u (English)Document4 pages275kw Diesel Generator Datasheet J275u (English)giapy0000No ratings yet
- m0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 VehiclesDocument16 pagesm0698 - Power Mode Bypass Controller To Suit Komatsu Hd785-5 and Hd785-7 Vehiclesgiapy0000No ratings yet
- Product Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverDocument33 pagesProduct Manual 04176 (Revision G, 8/2015) : Proact™ Ii Electric Powered Actuator and DriverpayNo ratings yet
- R"i 1 - F'y" Uo: LB II IftDocument2 pagesR"i 1 - F'y" Uo: LB II Iftgiapy0000No ratings yet
- VHP750 XHP750WCAT零件手册Document66 pagesVHP750 XHP750WCAT零件手册giapy000050% (2)
- Scania Diagnos 2.32 Release NotesDocument12 pagesScania Diagnos 2.32 Release Notesgiapy0000No ratings yet
- Proportional Chopper Amplifier VB-3A: Min MaxDocument5 pagesProportional Chopper Amplifier VB-3A: Min MaxryujoniNo ratings yet
- A Prediction of Water Quality Analysis Using Machine LearningDocument6 pagesA Prediction of Water Quality Analysis Using Machine LearningmonacmicsiaNo ratings yet
- OptQuest User ManualDocument190 pagesOptQuest User ManualYamal E Askoul TNo ratings yet
- Ductile deformation finite strain analysisDocument27 pagesDuctile deformation finite strain analysisJorgeBarriosMurielNo ratings yet
- Malpresentation and MalpositionDocument33 pagesMalpresentation and MalpositionPeprah Ondiba100% (1)
- Mste 3.0 Plane Geometry Hand OutsDocument8 pagesMste 3.0 Plane Geometry Hand OutsJasmine MartinezNo ratings yet
- Ajmera - Treon - FF - R4 - 13-11-17 FinalDocument45 pagesAjmera - Treon - FF - R4 - 13-11-17 FinalNikita KadamNo ratings yet
- ALE Between Two SAP SystemsDocument24 pagesALE Between Two SAP Systemsraghava nimmala100% (1)
- HP ALM FeaturesDocument51 pagesHP ALM FeaturesSuresh ManthaNo ratings yet
- Guaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39Document2 pagesGuaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39PraveenNo ratings yet
- Kitchen Chemistry ExperimentDocument7 pagesKitchen Chemistry ExperimentMss FaixaNo ratings yet
- Absorption QuestionsDocument11 pagesAbsorption QuestionsRalph CastinoNo ratings yet
- Phase Transition of RNA Protein Complexes Into Ordered Hollow CondensatesDocument9 pagesPhase Transition of RNA Protein Complexes Into Ordered Hollow CondensatesMilan StepanovNo ratings yet
- Forrester Roi StudyDocument30 pagesForrester Roi StudymcgettsNo ratings yet
- VeEX OTN Quick Reference GuideDocument12 pagesVeEX OTN Quick Reference GuideDewan H S SalehinNo ratings yet
- Impact of GIC On Power TransformersDocument141 pagesImpact of GIC On Power TransformersAkash Verma100% (1)
- Barrels & Actions by Harold HoffmanDocument238 pagesBarrels & Actions by Harold HoffmanNorm71% (7)
- Design of Three Span Steel Composite FlyoverDocument85 pagesDesign of Three Span Steel Composite FlyoverStructural SpreadsheetsNo ratings yet
- Wi Cswip 3.1 Part 13Document7 pagesWi Cswip 3.1 Part 13Ramakrishnan AmbiSubbiahNo ratings yet
- Preparation of Gases in LaboratoryDocument7 pagesPreparation of Gases in LaboratoryChu Wai Seng50% (2)
- Fulltext PDFDocument454 pagesFulltext PDFVirmantas JuoceviciusNo ratings yet
- Binder Modul WMS 10Document52 pagesBinder Modul WMS 10sandhiakhmadNo ratings yet
- Math10 Week3Day4 Polynomial-EqnsDocument44 pagesMath10 Week3Day4 Polynomial-EqnsMark Cañete PunongbayanNo ratings yet
- Effect of Temperature on Chemical ReactionDocument8 pagesEffect of Temperature on Chemical ReactionnajihahNo ratings yet
- Central Angles and Inscribed Angles GuideDocument22 pagesCentral Angles and Inscribed Angles GuideEric de Guzman100% (1)
- Sybsc Physics Practical Usphp3Document3 pagesSybsc Physics Practical Usphp3Ujjwala GokheNo ratings yet