You might also like
- Tcs 230Document10 pagesTcs 230cintekNo ratings yet
- Industrial Pressure Transmitter Model PT124B-210 StandardDocument2 pagesIndustrial Pressure Transmitter Model PT124B-210 StandardAffan PringgoNo ratings yet
- LM 4558 XXXDocument3 pagesLM 4558 XXXAffan PringgoNo ratings yet
- EDM Process FundamentalsDocument5 pagesEDM Process FundamentalsJreff GrimmNo ratings yet
- Photo PDFDocument1 pagePhoto PDFAffan PringgoNo ratings yet
- Microsoft Software License Terms Windows 7 Professional These License TermsDocument14 pagesMicrosoft Software License Terms Windows 7 Professional These License Termsma mayNo ratings yet
- Dry Film Photoresist: Process Parameter Detail / Notes Range Optimum Pre-Lamination Drying Time LaminationDocument1 pageDry Film Photoresist: Process Parameter Detail / Notes Range Optimum Pre-Lamination Drying Time LaminationAffan PringgoNo ratings yet
- DC Motor Driver ICDocument11 pagesDC Motor Driver ICKoray KaraNo ratings yet
- Quotation: Fiber Laser Marking MachineDocument2 pagesQuotation: Fiber Laser Marking MachineAffan PringgoNo ratings yet
- Basic PLC TrainingDocument114 pagesBasic PLC TrainingAffan Pringgo100% (12)
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Probestar Uses The Ets Series To "Automate" A PCB, Functional Test ProcessDocument4 pagesProbestar Uses The Ets Series To "Automate" A PCB, Functional Test ProcessAffan PringgoNo ratings yet
- Led 043Document7 pagesLed 043Affan PringgoNo ratings yet
- Multi-Color 8x8 & 16x16 Dot Matrix Displays Specifications and PinoutsDocument21 pagesMulti-Color 8x8 & 16x16 Dot Matrix Displays Specifications and PinoutsAffan PringgoNo ratings yet
- Multi-Color 8x8 & 16x16 Dot Matrix Displays Specifications and PinoutsDocument21 pagesMulti-Color 8x8 & 16x16 Dot Matrix Displays Specifications and PinoutsAffan PringgoNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 12 Pulse ConverterDocument5 pages12 Pulse ConvertersumitchintuNo ratings yet
- MotoTRBO Programming Guide PDFDocument14 pagesMotoTRBO Programming Guide PDFSmartPTT89% (9)
- Description General Specifications: Photoswitch Photoelectric SensorsDocument8 pagesDescription General Specifications: Photoswitch Photoelectric Sensorsmekhman mekhtyNo ratings yet
- Mps1000 ManualDocument46 pagesMps1000 ManualAnne NicoletaNo ratings yet
- 11 PurchaseOrder FormDocument2 pages11 PurchaseOrder FormJocelyn Nacion OrogoNo ratings yet
- Principles of Lighting in A BuildingDocument21 pagesPrinciples of Lighting in A BuildingGaffur BoliyaNo ratings yet
- PJ2500M-C / PJ2000M-C: User ManualDocument40 pagesPJ2500M-C / PJ2000M-C: User ManualQuive CarlosNo ratings yet
- FDI302 FDI302 FDI302 FDI302 FDI302: Field Device InterfaceDocument2 pagesFDI302 FDI302 FDI302 FDI302 FDI302: Field Device InterfaceLuis MilanNo ratings yet
- Generator Set Data Sheet: Fuel ConsumptionDocument3 pagesGenerator Set Data Sheet: Fuel ConsumptionJohn CardonaNo ratings yet
- Impedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsDocument26 pagesImpedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsHeiner Farid Castillo AvellaNo ratings yet
- Pid Controller Tuning in SimulinkDocument7 pagesPid Controller Tuning in SimulinkRicael SpirandeliNo ratings yet
- DM CBL 8g PDocument2 pagesDM CBL 8g Pfaruk604No ratings yet
- Technical Information Separable ConnectorsDocument32 pagesTechnical Information Separable Connectorsalmi yunusNo ratings yet
- Dracast Led1000 Fresnel Series Info SheetDocument2 pagesDracast Led1000 Fresnel Series Info SheetJohnNo ratings yet
- EnergoGlobal EG 22 PDocument4 pagesEnergoGlobal EG 22 PnebjakNo ratings yet
- Hcia Lte GeralDocument48 pagesHcia Lte Geralvictor kudidissaNo ratings yet
- Catalogo Numatics 554SA400K046T30Document25 pagesCatalogo Numatics 554SA400K046T30Jair Mata Cuenca100% (1)
- A Review On Recent Progress of Portable Short-Range Noncontact Microwave Radar SystemsDocument15 pagesA Review On Recent Progress of Portable Short-Range Noncontact Microwave Radar SystemsAhmed HussainNo ratings yet
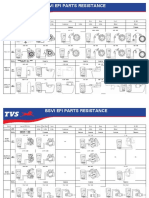
- EFI ResistanceDocument3 pagesEFI ResistanceMuni Muniyappan33% (3)
- SA100 V 14 BulletinDocument8 pagesSA100 V 14 BulletinTeepoonsab somsaiNo ratings yet
- Tom Lish: What Is A Dynamometer and How Does It Work?Document2 pagesTom Lish: What Is A Dynamometer and How Does It Work?Tiago AvilaNo ratings yet
- Quidway S3900 Series Ethernet Switches Installation ManualDocument102 pagesQuidway S3900 Series Ethernet Switches Installation Manualcharliil100% (1)
- Infineon Bts6133d Ds v01 00 enDocument17 pagesInfineon Bts6133d Ds v01 00 enmarino246No ratings yet
- Digital Logic Design Course Objectives and UnitsDocument2 pagesDigital Logic Design Course Objectives and UnitsRameshchandra K ECENo ratings yet
- Presentation On DC MicrogridDocument9 pagesPresentation On DC MicrogridRamesh NaiduNo ratings yet
- Ground Check Monitors For Underground Power SystemsDocument8 pagesGround Check Monitors For Underground Power SystemsjorgeayreNo ratings yet
- Mv185whb-N10-Etc 19m38aDocument26 pagesMv185whb-N10-Etc 19m38acarlos alberto hermidaNo ratings yet
- Models - Acdc.capacitor DCDocument16 pagesModels - Acdc.capacitor DCFrancisco Rafael CerónNo ratings yet
- Calibration of Thrmocouples: Assignment # 01Document3 pagesCalibration of Thrmocouples: Assignment # 01ahmadNo ratings yet
- Install Canon Sigma lens Rechip model B manualDocument6 pagesInstall Canon Sigma lens Rechip model B manualWiwy TransmitNo ratings yet