You might also like
- MIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotDocument9 pagesMIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotJoseph ProstNo ratings yet
- Modeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureDocument16 pagesModeling and Experimental Evaluation of An Improved Amphibious Robot With Compact StructureRicardo Sebastian Ricardo RanillaNo ratings yet
- Introduction To Autonomous Mobile Robots: Second EditionDocument14 pagesIntroduction To Autonomous Mobile Robots: Second EditionmotazNo ratings yet
- 25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsDocument7 pages25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsMEMONCHAS NEMOZNo ratings yet
- 0620Document7 pages0620Shahrzad GhasemiNo ratings yet
- Representation-Free Model Predictive Control For Dynamic Motions in QuadrupedsDocument18 pagesRepresentation-Free Model Predictive Control For Dynamic Motions in Quadrupeds이재봉No ratings yet
- On A Bio-Inspired Amphibious Robot Capable of Multimodal MotionDocument10 pagesOn A Bio-Inspired Amphibious Robot Capable of Multimodal Motionnikhil210492No ratings yet
- (2006) Modeling and simulation of biped kinematics using bond-graphsDocument6 pages(2006) Modeling and simulation of biped kinematics using bond-graphsPaul AlvarezNo ratings yet
- MIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionDocument8 pagesMIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionCuenta De RespaldoNo ratings yet
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNo ratings yet
- (ICRA 2019) Mini Cheetah - A Platform For Pushing The Limits of Dynamic Quadruped ControlDocument7 pages(ICRA 2019) Mini Cheetah - A Platform For Pushing The Limits of Dynamic Quadruped ControlHung NguyenNo ratings yet
- 2020 Ral BjelonicDocument8 pages2020 Ral BjelonicdimtecNo ratings yet
- Machines 10 00632 v2Document17 pagesMachines 10 00632 v2Woodrow FoxNo ratings yet
- Self-balancing robot with gyroscope maintains stability and safetyDocument11 pagesSelf-balancing robot with gyroscope maintains stability and safetyRajat SinghNo ratings yet
- Robots Step Outside: September 2005Document5 pagesRobots Step Outside: September 2005Ấm LeeNo ratings yet
- 3 - Autonomous Stair-Climbing With Miniature Jumping RobotsDocument13 pages3 - Autonomous Stair-Climbing With Miniature Jumping RobotsjowdiverNo ratings yet
- 2005 AMAM BigDogDocument5 pages2005 AMAM BigDogDiriba AbdiNo ratings yet
- Dynamic Torque Control of A Hydraulic Quadruped RobotDocument6 pagesDynamic Torque Control of A Hydraulic Quadruped RobotPrathamesh SarafNo ratings yet
- Robot For Transmission LineDocument6 pagesRobot For Transmission LinebhattparthivNo ratings yet
- 00887449Document15 pages00887449vozokoemmanuelNo ratings yet
- A Mobile Robot With Autonomous Climbing and DescenDocument19 pagesA Mobile Robot With Autonomous Climbing and DescenAprida HutagalungNo ratings yet
- Novel Mechatronics Design For A Robotic Fish: Jindong Liu, Ian Dukes, Huosheng HuDocument6 pagesNovel Mechatronics Design For A Robotic Fish: Jindong Liu, Ian Dukes, Huosheng HuRaunak GuptaNo ratings yet
- Cable Telescopic ActuationDocument7 pagesCable Telescopic ActuationSuryank JoshiNo ratings yet
- System Design and Control of Anthropomorphic Walking Robot LOLADocument9 pagesSystem Design and Control of Anthropomorphic Walking Robot LOLAManuela MartínezNo ratings yet
- Omni Wheels Robot For Effective Surveillance and Transportation PurposeDocument8 pagesOmni Wheels Robot For Effective Surveillance and Transportation PurposeIJRASETPublicationsNo ratings yet
- Design, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesDocument6 pagesDesign, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesIbrahim Ishaq KishimiNo ratings yet
- Sciencedirect: Mechanical Design and Control System of An Omni-Directional Mobile Robot For Material ConveyingDocument4 pagesSciencedirect: Mechanical Design and Control System of An Omni-Directional Mobile Robot For Material ConveyingNIKHIL SHINDENo ratings yet
- 81-Designing A System For Mobile Manipulation FromDocument6 pages81-Designing A System For Mobile Manipulation FromHaider AliNo ratings yet
- Robotic SystemDocument24 pagesRobotic SystemadimrinNo ratings yet
- Stickman Towards A Human Scale Acrobatic Robot PaperDocument7 pagesStickman Towards A Human Scale Acrobatic Robot PaperstevecraigNo ratings yet
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocument4 pagesAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNo ratings yet
- Jeong 2008Document8 pagesJeong 2008Laila AzzouziNo ratings yet
- Design of Modular Snake RobotDocument6 pagesDesign of Modular Snake RobotShoeb Ahmed SyedNo ratings yet
- Autonomous Stair Climbing Algorithm for Small Four-Tracked RobotDocument6 pagesAutonomous Stair Climbing Algorithm for Small Four-Tracked RobotLohatiNo ratings yet
- Millibot Trains For Enhanced MobilityDocument10 pagesMillibot Trains For Enhanced MobilitySarath BalajiNo ratings yet
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Document12 pagesAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNo ratings yet
- MIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotDocument9 pagesMIT Cheetah 3: Design and Control of A Robust, Dynamic Quadruped RobotFernando Angel Rodríguez CortésNo ratings yet
- AQUA An Amphibious Autonomous RobotDocument11 pagesAQUA An Amphibious Autonomous RobotPablo RivasNo ratings yet
- AQUA An Amphibious Autonomous RobotDocument10 pagesAQUA An Amphibious Autonomous RobotlingbazhixingNo ratings yet
- 00863909Document6 pages00863909Ingrid GiacomeliNo ratings yet
- Vine Robots: Design, Teleoperation, and Deployment For Navigation and ExplorationDocument10 pagesVine Robots: Design, Teleoperation, and Deployment For Navigation and Explorationdivya AshishNo ratings yet
- Design Analysis of A Remote Controlled P PDFDocument12 pagesDesign Analysis of A Remote Controlled P PDFVũ Mạnh CườngNo ratings yet
- Design and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariDocument6 pagesDesign and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariPutri metapowerNo ratings yet
- WALK MAN A High Performance Humanoid PlaDocument35 pagesWALK MAN A High Performance Humanoid PladoglasnegriNo ratings yet
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDocument6 pagesSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizNo ratings yet
- Ajij Sayyad, B. Seth and P. Seshu: Single-Legged Hopping Robotics Research-A ReviewDocument27 pagesAjij Sayyad, B. Seth and P. Seshu: Single-Legged Hopping Robotics Research-A Reviewbula69No ratings yet
- Stair Climbing Robot ReportDocument15 pagesStair Climbing Robot Report22me01004No ratings yet
- Design and Development of One Degree of Freedom Upper Limb ExoskeletonDocument6 pagesDesign and Development of One Degree of Freedom Upper Limb ExoskeletonWarnithaNo ratings yet
- 25905608-Design and Development of Three Arms Transmission Line Inspection RobotDocument4 pages25905608-Design and Development of Three Arms Transmission Line Inspection RobotRashtra BhushanNo ratings yet
- Preprints202007 0217 v2Document21 pagesPreprints202007 0217 v2Thoan MạnhNo ratings yet
- (2006) - A Cockroach Inspired Robot With Artificial Muscles PDFDocument6 pages(2006) - A Cockroach Inspired Robot With Artificial Muscles PDFJhonny Alexander Valdés CorreaNo ratings yet
- Robô Pêndulo 2 Rodas - 1Document7 pagesRobô Pêndulo 2 Rodas - 1Victor PassosNo ratings yet
- Micromachines 13 01404 v2Document20 pagesMicromachines 13 01404 v2technologie collegeNo ratings yet
- A Robotic Cane For Balance Maintenance AssistanceDocument12 pagesA Robotic Cane For Balance Maintenance AssistancesouravNo ratings yet
- Crawling_gait_realization_of_the_mini-modular_clim (1)Document10 pagesCrawling_gait_realization_of_the_mini-modular_clim (1)Attila NagyNo ratings yet
- SENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTDocument28 pagesSENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTMahaManthraNo ratings yet
- Mechanical Design and Optimal Control of HumanoidDocument12 pagesMechanical Design and Optimal Control of HumanoidDavi AssunçãoNo ratings yet
- Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesFrom EverandAutonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Belgas P630R IOMDocument3 pagesBelgas P630R IOMSMcNo ratings yet
- d-Copia3500MF 4500MF 5500MFsmY113351-4Document1,051 pagesd-Copia3500MF 4500MF 5500MFsmY113351-4ctecisbNo ratings yet
- 06 - 1 Cutting Tools - 2013 - LRDocument17 pages06 - 1 Cutting Tools - 2013 - LRBaggerkingNo ratings yet
- You Yangs RP Visitor GuideDocument2 pagesYou Yangs RP Visitor GuideSomaNo ratings yet
- SYMAP UsersManual E PDFDocument98 pagesSYMAP UsersManual E PDFRafaqatAliNo ratings yet
- 59-Form and Plot Frame Editor PDFDocument70 pages59-Form and Plot Frame Editor PDFAries TsaiNo ratings yet
- Reliance Jio Industry AnalysisDocument45 pagesReliance Jio Industry AnalysisBhavya BhartiNo ratings yet
- Theory of Metal Cutting-Module 1Document116 pagesTheory of Metal Cutting-Module 1rejeesh_rajendranNo ratings yet
- Wabco Air Suspension Compressor RepairDocument3 pagesWabco Air Suspension Compressor RepairgarcolNo ratings yet
- Bluskies Engineering PVT LTD: Acp Panel Inpection ReportDocument7 pagesBluskies Engineering PVT LTD: Acp Panel Inpection ReportRavi Shankar KolluruNo ratings yet
- Yasnac Mx-3 Fault Finding GuideDocument70 pagesYasnac Mx-3 Fault Finding Guidechidambaram kasi100% (1)
- Escorts F-15: Hydraulic Mobile Pick-n-Carry CraneDocument2 pagesEscorts F-15: Hydraulic Mobile Pick-n-Carry CraneChandra MouliNo ratings yet
- Dissolved OxygenDocument2 pagesDissolved OxygenAnonymous atBeojaNo ratings yet
- Structural Theory Eval Exam by SorianoDocument6 pagesStructural Theory Eval Exam by SorianoBenjie MorenoNo ratings yet
- c600 17lookinsideDocument6 pagesc600 17lookinsideИван МинчевNo ratings yet
- Especificaciones LuminariasDocument3 pagesEspecificaciones LuminariasRoni DominguezNo ratings yet
- IIT-JEE-Physics-1997: Time: Three HourDocument9 pagesIIT-JEE-Physics-1997: Time: Three HourAdarsh UdayanNo ratings yet
- EASA Part 66 Module 7 MCQ and Essay QuestionsDocument4 pagesEASA Part 66 Module 7 MCQ and Essay QuestionsazadairNo ratings yet
- How To Sputter Thin Films of Metal Onto GlassDocument5 pagesHow To Sputter Thin Films of Metal Onto Glassfred_m_48601No ratings yet
- A ProcessDocument41 pagesA ProcessjulioNo ratings yet
- Preliminary Pin-out for 12 Cylinder Engine Control UnitDocument6 pagesPreliminary Pin-out for 12 Cylinder Engine Control UnitSUELENNo ratings yet
- Construction of Multistoried Boys Hostel by Kanwarjot SinghDocument22 pagesConstruction of Multistoried Boys Hostel by Kanwarjot SinghvipinNo ratings yet
- Calibration of A Pressure GaugeDocument6 pagesCalibration of A Pressure GaugeThapelo100% (2)
- (Mamoru Hosaka (Auth.) ) Modeling of Curves and SuDocument363 pages(Mamoru Hosaka (Auth.) ) Modeling of Curves and Suamalendu_biswas_1No ratings yet
- SPINTRONICSDocument33 pagesSPINTRONICSSyam Pradeep ReddyNo ratings yet
- Maximum Power Tracking System for Solar Panels Using Automatic ControlDocument79 pagesMaximum Power Tracking System for Solar Panels Using Automatic ControlHarish VarmaNo ratings yet
- Hoisting Systems ExplainedDocument21 pagesHoisting Systems Explainedsparda94No ratings yet
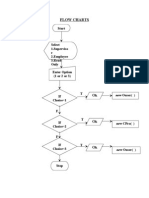
- Flow Charts Option: StartDocument13 pagesFlow Charts Option: StartbalabooksNo ratings yet
- Supplier Deviation Request FormDocument2 pagesSupplier Deviation Request Formjainik shahNo ratings yet
- Otago:Polytechnic: National Diploma in Drinking Water AssessmentDocument33 pagesOtago:Polytechnic: National Diploma in Drinking Water AssessmentThomas CollinsNo ratings yet