You might also like
- Paper Model - WikipediaDocument18 pagesPaper Model - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Western Dragon V3 Updated PDFDocument19 pagesWestern Dragon V3 Updated PDFMark Moldez94% (17)
- Modelling mechanical properties of woven fabrics using ABAQUS beam modelDocument11 pagesModelling mechanical properties of woven fabrics using ABAQUS beam modelkothapalli21100% (1)
- Maintenance Manual: Models 7200/7300/7310 Reach-Fork TrucksDocument441 pagesMaintenance Manual: Models 7200/7300/7310 Reach-Fork TrucksMigue Angel Rodríguez Castro100% (2)
- Origami Real INTRO - WikipediaDocument61 pagesOrigami Real INTRO - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Non-Linear Structures: Matrix Methods of Analysis and Design by ComputersFrom EverandNon-Linear Structures: Matrix Methods of Analysis and Design by ComputersRating: 4.5 out of 5 stars4.5/5 (2)
- Bhagavad Gita (Hindi)Document953 pagesBhagavad Gita (Hindi)rajusinghin86% (7)
- Origami MIT - L6Document72 pagesOrigami MIT - L6Chew Khai Seng100% (3)
- (Solid Mechanics and Its Applications 26) M. A. Gonzalez-Palacios, J. Angeles (Auth.) - Cam Synthesis-Springer Netherlands (1993)Document260 pages(Solid Mechanics and Its Applications 26) M. A. Gonzalez-Palacios, J. Angeles (Auth.) - Cam Synthesis-Springer Netherlands (1993)karpouzadNo ratings yet
- 3D Printing of Robotic Soft Actuators WithDocument9 pages3D Printing of Robotic Soft Actuators WithPringgo Widyo LaksonoNo ratings yet
- Jack o Lantern 1.2 HimanshuDocument3 pagesJack o Lantern 1.2 HimanshuLeonVelasquezRestrepoNo ratings yet
- Constitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Document12 pagesConstitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Jose ManuelNo ratings yet
- Interfacing Electrification and System ReliabilityDocument29 pagesInterfacing Electrification and System Reliabilityพี่จิน ยศเนืองนิตย์No ratings yet
- PV Elite (Construccion de Recipiente) MDMTDocument8 pagesPV Elite (Construccion de Recipiente) MDMTAlejandro CanoNo ratings yet
- Finite Element Analysis of The In-Service-Welding of T Joint Pipe ConnectionDocument12 pagesFinite Element Analysis of The In-Service-Welding of T Joint Pipe ConnectionMohamed SamyNo ratings yet
- Bendix Rsa Fuel Injection SystemDocument21 pagesBendix Rsa Fuel Injection SystemAdrian James100% (10)
- Ficha Tecnica Komatsu 400 - 7Document52 pagesFicha Tecnica Komatsu 400 - 7bariciado1No ratings yet
- Integrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape ControlDocument30 pagesIntegrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape Controlsubhra_civ658No ratings yet
- 1 s2.0 S0264127519304381 MainDocument13 pages1 s2.0 S0264127519304381 Maingus.sukkasigNo ratings yet
- Act 3Document16 pagesAct 3Nida AkNo ratings yet
- Energies 11 02687Document17 pagesEnergies 11 02687Lucas ErburuNo ratings yet
- Con Spring 3Document15 pagesCon Spring 3scoobymehrotra27No ratings yet
- Experimental and Analytical Analysis of Thermoplastic Reinforced Composite Sheet Deep DrawingDocument13 pagesExperimental and Analytical Analysis of Thermoplastic Reinforced Composite Sheet Deep DrawingbehzadNo ratings yet
- 1 s2.0 S2214785322045953 MainDocument7 pages1 s2.0 S2214785322045953 Mainmarkpoland21No ratings yet
- Terri Ault 2006Document14 pagesTerri Ault 2006ChristopherElPadrinoCardenasNo ratings yet
- Nada ShabaanDocument15 pagesNada ShabaanNada ShabanNo ratings yet
- Ling 2016Document12 pagesLing 2016Ho Nhat LinhNo ratings yet
- Composite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-XuanDocument13 pagesComposite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-Xuanezbai Aparicio SandovalNo ratings yet
- Materials: Overview and Future Advanced Engineering Applications For Morphing Surfaces by Shape Memory Alloy MaterialsDocument19 pagesMaterials: Overview and Future Advanced Engineering Applications For Morphing Surfaces by Shape Memory Alloy MaterialsKrishna Mohan ChowdaryNo ratings yet
- Robot 6 DofDocument5 pagesRobot 6 DofMiguel PérezNo ratings yet
- Fonseca2020 PDFDocument19 pagesFonseca2020 PDFgbook picsNo ratings yet
- International Journal of Non-Linear Mechanics: Larissa M. Fonseca, Marcelo A. SaviDocument19 pagesInternational Journal of Non-Linear Mechanics: Larissa M. Fonseca, Marcelo A. Savigbook picsNo ratings yet
- Ecaadesigradi2019 300Document10 pagesEcaadesigradi2019 300eeman siaNo ratings yet
- Jmse 07 00340 v2Document24 pagesJmse 07 00340 v2JangdiniNo ratings yet
- Composites Science and Technology - 71!15!2011Document25 pagesComposites Science and Technology - 71!15!2011Luis Miguel Perez PertuzNo ratings yet
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanNo ratings yet
- Construction and Building Materials: Xunhao Ding, Tao Ma, Wang GaoDocument14 pagesConstruction and Building Materials: Xunhao Ding, Tao Ma, Wang GaoHeiro KeystrifeNo ratings yet
- Bio Inspired Design of Electrically DrivDocument21 pagesBio Inspired Design of Electrically DrivNavneet HoodaNo ratings yet
- Đa Thân Để Chia Lưới Bánh Răng Xoắn Và Bánh Răng Xoắn Dựa Trên Các Tính Toán Tiếp Xúc Ba Chiều Chi TiếDocument18 pagesĐa Thân Để Chia Lưới Bánh Răng Xoắn Và Bánh Răng Xoắn Dựa Trên Các Tính Toán Tiếp Xúc Ba Chiều Chi TiếDương CaoNo ratings yet
- 1 s2.0 S1359836818306036 MainDocument12 pages1 s2.0 S1359836818306036 Maincm.torvergataNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- A - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearDocument11 pagesA - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearSoma VargaNo ratings yet
- Computer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresDocument15 pagesComputer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresRichard LiuNo ratings yet
- 4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsDocument12 pages4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsMayra ZezattiNo ratings yet
- Kelvin CellDocument12 pagesKelvin CellR TharunishNo ratings yet
- Three Dimensional Finite Element Modeling of FlexiDocument15 pagesThree Dimensional Finite Element Modeling of Flexiaji raNo ratings yet
- Design Blades of A Wind Turbine Using Flexible Multibody ModellingDocument8 pagesDesign Blades of A Wind Turbine Using Flexible Multibody Modellingsrinath_iitmNo ratings yet
- 07 - Chapter 2Document17 pages07 - Chapter 2Libu GeorgebabuNo ratings yet
- 1 s2.0 S1568494621005676 MainDocument14 pages1 s2.0 S1568494621005676 MainRaul DiazNo ratings yet
- Design and Fabrication of Periodic Lattice-Based Cellular StructuresDocument13 pagesDesign and Fabrication of Periodic Lattice-Based Cellular StructuresYusuf YamanerNo ratings yet
- 33 67 1 RV PDFDocument13 pages33 67 1 RV PDFakanyilmazNo ratings yet
- Pages From Prototyping Architecture-2Document2 pagesPages From Prototyping Architecture-2allisonaxeNo ratings yet
- NASA technical memo simplifies micromechanics of plain weave compositesDocument15 pagesNASA technical memo simplifies micromechanics of plain weave compositesGani PateelNo ratings yet
- Ijetae 0812 46Document6 pagesIjetae 0812 46vishwajeet patilNo ratings yet
- Numerical Modelling of Ballistic Impact Response at Low Velocity in Aramid FabricsDocument15 pagesNumerical Modelling of Ballistic Impact Response at Low Velocity in Aramid FabricsGiovanniNo ratings yet
- Ijmet 09 04 083 PDFDocument9 pagesIjmet 09 04 083 PDF39SEAShashi KhatriNo ratings yet
- Sarvestani, 2017Document39 pagesSarvestani, 2017RafaelNo ratings yet
- Free Floating Space Robot ArticlesDocument2 pagesFree Floating Space Robot ArticlesHaile SimachewNo ratings yet
- Simplified Micromechanics of Plain Weave CompositesDocument15 pagesSimplified Micromechanics of Plain Weave Compositess_padu3003@yahoo.comNo ratings yet
- Ijmet 09 04 083Document9 pagesIjmet 09 04 083Santosh RathodNo ratings yet
- A Machine Learning Approach To Determine The Elastic Properties of PrintedDocument9 pagesA Machine Learning Approach To Determine The Elastic Properties of PrintedsudhirNo ratings yet
- Failure and Prospects of Modification in A Belt Conveyor SystemDocument4 pagesFailure and Prospects of Modification in A Belt Conveyor SystemGogyNo ratings yet
- Optimization of Lattice Structures For Additive Manufacturing TechnologiesDocument10 pagesOptimization of Lattice Structures For Additive Manufacturing TechnologiesJavier Andres Munoz ChavesNo ratings yet
- Predictive Model For The Design of Zwitterionic Polymer Brushes: A Statistical Design of Experiments ApproachDocument9 pagesPredictive Model For The Design of Zwitterionic Polymer Brushes: A Statistical Design of Experiments ApproachrmykmrlvNo ratings yet
- 5 Izzuddin, DowlingDocument10 pages5 Izzuddin, Dowlingminhthanha6No ratings yet
- International Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiDocument8 pagesInternational Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiGunaseelanMurugesanNo ratings yet
- De Miguel 2017Document31 pagesDe Miguel 2017DinaNo ratings yet
- Electronics 12 02928Document23 pagesElectronics 12 02928kurts010No ratings yet
- Flexible Arm On ShaftDocument26 pagesFlexible Arm On ShaftCleves AxiomaNo ratings yet
- Art 1Document11 pagesArt 1Jefferson ChavarríaNo ratings yet
- Diagnostyka Modification Krolred2Document9 pagesDiagnostyka Modification Krolred2Everest Engineering Lead R&DNo ratings yet
- Topological Derivative For Multi-Scale Linear Elasticity Models Applied To The Synthesis of MicrostructuresDocument24 pagesTopological Derivative For Multi-Scale Linear Elasticity Models Applied To The Synthesis of MicrostructuresDoXuanNamNo ratings yet
- Fruit - WikipediaDocument53 pagesFruit - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Light - WikipediaDocument94 pagesLight - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Telugu Action Film SuperDocument16 pagesTelugu Action Film SuperOrigami toturial by AbhijeetNo ratings yet
- Circles Previous Year QuestionsDocument18 pagesCircles Previous Year QuestionsriteshNo ratings yet
- English - WikipediaDocument6 pagesEnglish - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Kiwi - WikipediaDocument60 pagesKiwi - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Fruit - WikipediaDocument53 pagesFruit - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Doraemon - WikipediaDocument68 pagesDoraemon - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Paper - WikipediaDocument59 pagesPaper - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Power - Wikipedia PDFDocument16 pagesPower - Wikipedia PDFOrigami toturial by AbhijeetNo ratings yet
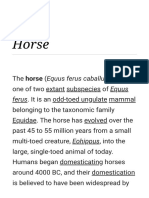
- Horse - WikipediaDocument173 pagesHorse - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Wolf - WikipediaDocument187 pagesWolf - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Power - Wikipedia PDFDocument16 pagesPower - Wikipedia PDFOrigami toturial by AbhijeetNo ratings yet
- Electricity - WikipediaDocument114 pagesElectricity - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Power - Wikipedia PDFDocument16 pagesPower - Wikipedia PDFOrigami toturial by AbhijeetNo ratings yet
- Water - Wikipedia PDFDocument184 pagesWater - Wikipedia PDFOrigami toturial by AbhijeetNo ratings yet
- TENSESDocument9 pagesTENSESworld of innovationNo ratings yet
- SM 18 3DPrintingOfComplexOrigamiDocument9 pagesSM 18 3DPrintingOfComplexOrigamiOrigami toturial by AbhijeetNo ratings yet
- Japanese Origami Master Satoshi KamiyaDocument6 pagesJapanese Origami Master Satoshi KamiyaOrigami toturial by AbhijeetNo ratings yet
- SM 18 3DPrintingOfComplexOrigamiDocument9 pagesSM 18 3DPrintingOfComplexOrigamiOrigami toturial by AbhijeetNo ratings yet
- SM 18 3DPrintingOfComplexOrigamiDocument9 pagesSM 18 3DPrintingOfComplexOrigamiOrigami toturial by AbhijeetNo ratings yet
- SM 18 3DPrintingOfComplexOrigamiDocument9 pagesSM 18 3DPrintingOfComplexOrigamiOrigami toturial by AbhijeetNo ratings yet
- Actuators: Design of Soft Origami Mechanisms With Targeted SymmetriesDocument16 pagesActuators: Design of Soft Origami Mechanisms With Targeted SymmetriesOrigami toturial by AbhijeetNo ratings yet
- Origami - Eiffel TowerDocument3 pagesOrigami - Eiffel Towerapi-3709851100% (8)
- Calcium Sulfate Crystallization in Phosphoric Acid PDFDocument133 pagesCalcium Sulfate Crystallization in Phosphoric Acid PDFabderrahimnNo ratings yet
- Making Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyDocument2 pagesMaking Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyCương Phạm NgọcNo ratings yet
- COMEC Modular Storage SolutionsDocument8 pagesCOMEC Modular Storage SolutionsPedro ChapadoNo ratings yet
- Active Front EndDocument5 pagesActive Front EndDaleel LillaNo ratings yet
- Genetic AlgorithmDocument46 pagesGenetic AlgorithmJerryNo ratings yet
- 18,21. Naidian CatalogueDocument31 pages18,21. Naidian CatalogueTaQuangDucNo ratings yet
- United States Air Force: Next Generation Ejection SeatDocument2 pagesUnited States Air Force: Next Generation Ejection SeatChris EfstathiouNo ratings yet
- Performance-Creative Design Concept For Concrete InfrastructureDocument11 pagesPerformance-Creative Design Concept For Concrete InfrastructureTuan PnNo ratings yet
- Reading 03 - Iron Lady The Eiffel TowerDocument2 pagesReading 03 - Iron Lady The Eiffel TowerFernando Elías Valderrama GómezNo ratings yet
- Data Acquisition Systems (DAS) in GeneralDocument3 pagesData Acquisition Systems (DAS) in GeneralArjun SinghNo ratings yet
- EJB 3.0 Final PreparedDocument243 pagesEJB 3.0 Final PreparedjayavardhankotiNo ratings yet
- Performance of tuned mass dampers under wind loadsDocument13 pagesPerformance of tuned mass dampers under wind loadsDhirendra Kumar PandeyNo ratings yet
- Cooling Tower PDFDocument3 pagesCooling Tower PDFmaimslapNo ratings yet
- EMB 20100301 Mar 2010Document156 pagesEMB 20100301 Mar 2010agnithiumNo ratings yet
- CST Design Studio - WorkflowDocument102 pagesCST Design Studio - WorkflowHeber Bustos100% (7)
- Nba Sar B.tech. Electronics UgDocument171 pagesNba Sar B.tech. Electronics UgSaurabh BhiseNo ratings yet
- MSDS 42935Document3 pagesMSDS 42935EliasNo ratings yet
- Ehv Bladder AccumulatorsDocument38 pagesEhv Bladder AccumulatorsFranki Hari MNo ratings yet
- Phaser3300MFP Firmware Upgrade Instructions CWISDocument2 pagesPhaser3300MFP Firmware Upgrade Instructions CWISAlgenis De Leon RamirezNo ratings yet
- Oil GasDocument72 pagesOil Gastony6868100% (1)
- Methode of Statement Lightning Protection & Earthing System Review 4Document27 pagesMethode of Statement Lightning Protection & Earthing System Review 4firman zakirNo ratings yet
- Indigo Assessment - Cynthia Nieto VargasDocument14 pagesIndigo Assessment - Cynthia Nieto Vargasapi-506651646No ratings yet
- Evolution of Oilfield BatteriesDocument16 pagesEvolution of Oilfield BatteriesPasquale CutriNo ratings yet
- GE Lighting Systems Crane Mounted Luminaire Series Spec Sheet 3-81Document2 pagesGE Lighting Systems Crane Mounted Luminaire Series Spec Sheet 3-81Alan MastersNo ratings yet