You might also like
- Navedtra - 12966 - Naval OrientationDocument392 pagesNavedtra - 12966 - Naval OrientationSomeone You Know100% (1)
- WG 15a Structural Systems - OffshoreDocument273 pagesWG 15a Structural Systems - OffshoreIlkin hasanovNo ratings yet
- Sname New Steel EstimationDocument9 pagesSname New Steel EstimationAditya PriyawardhanaNo ratings yet
- The Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselDocument7 pagesThe Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselRahul Phadake100% (1)
- VMOT-H53-300-03-Electrical Load ChartDocument11 pagesVMOT-H53-300-03-Electrical Load ChartVECTOR MARINE & OFFSHORE TECHNOLOGYNo ratings yet
- Fluid Mechanics: Submarine DesignDocument44 pagesFluid Mechanics: Submarine DesignArjun S Rana67% (3)
- Rescue Boat Davit FoundationDocument1 pageRescue Boat Davit FoundationKiran KumarNo ratings yet
- Centre of FloatationDocument7 pagesCentre of FloatationBlack HawkNo ratings yet
- Inclining Experiment: ObjectiveDocument7 pagesInclining Experiment: ObjectiveAhmedYassinNo ratings yet
- Stresses On Ship StructureDocument72 pagesStresses On Ship Structure187Ranjan Kumar100% (1)
- SQA Stability TheoryDocument10 pagesSQA Stability Theorysaurabh gulawaniNo ratings yet
- SSC-436 The Effect of Fabricaton Tolerances On Fatigue Life of Welded JointsDocument100 pagesSSC-436 The Effect of Fabricaton Tolerances On Fatigue Life of Welded JointsBeniamine SarmientoNo ratings yet
- Typical Towing Patterns ADocument3 pagesTypical Towing Patterns AP Venkata SureshNo ratings yet
- Equiment Number CalculationDocument12 pagesEquiment Number CalculationDinakaranNo ratings yet
- International Load Lines Convention, 1966/2005: Prof. Manuel Ventura MSC in Naval Architecture and Marine EngineeringDocument17 pagesInternational Load Lines Convention, 1966/2005: Prof. Manuel Ventura MSC in Naval Architecture and Marine EngineeringMuhammad Akhfaf100% (1)
- Damage Stability - TankersDocument5 pagesDamage Stability - TankersPushkar LambaNo ratings yet
- Shafting CalculationsDocument4 pagesShafting Calculationsmohammad shihabNo ratings yet
- Mts 321: Ship Construction: Engr. Wugha, King NyecheDocument46 pagesMts 321: Ship Construction: Engr. Wugha, King NyecheDr SensibleNo ratings yet
- Stability Intact & Trim Cat 17mDocument37 pagesStability Intact & Trim Cat 17mRomie Harie100% (2)
- Pivot PointDocument22 pagesPivot Pointjanderclanderpeich100% (1)
- Bow Thruster Tb35tDocument5 pagesBow Thruster Tb35tGiyan Arpero ManiaNo ratings yet
- KS-0179-1 Procedures For Determination of Lightship Displace ENGDocument12 pagesKS-0179-1 Procedures For Determination of Lightship Displace ENGwaleedyehiaNo ratings yet
- SPRID 101.30 Equipment Number CalculationDocument2 pagesSPRID 101.30 Equipment Number CalculationTrường Bửu TrầnNo ratings yet
- Stability Info BookletDocument15 pagesStability Info BookletShailja ChetanNo ratings yet
- Checklist 12217-3 - 2015 Stability Power Under 6m En161206Document17 pagesChecklist 12217-3 - 2015 Stability Power Under 6m En161206Yudi DarmawanNo ratings yet
- 2.0 - Design and Development of Steering System of ShipDocument24 pages2.0 - Design and Development of Steering System of ShipSandeep MandalNo ratings yet
- Unit 3 Ship StructuresDocument21 pagesUnit 3 Ship StructuresRodrigo LimaNo ratings yet
- Load Line: Ship DesignDocument89 pagesLoad Line: Ship DesignMuhammed Talha ÖzdenoğluNo ratings yet
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (2)
- Rockwool 2Document8 pagesRockwool 2leroniusNo ratings yet
- BilgingDocument90 pagesBilgingashwin.devaliya692371% (7)
- Azipod ReferencesDocument22 pagesAzipod ReferencesVlad MocanuNo ratings yet
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- Stability and Loading Scenario 58Document3 pagesStability and Loading Scenario 58Laurencia LaveniaNo ratings yet
- Seam 4 ADocument4 pagesSeam 4 ARoy CamajalanNo ratings yet
- 7.rohit Mishra LBS Notes PDFDocument304 pages7.rohit Mishra LBS Notes PDFnishant100% (2)
- ST 703 Ship Design Ii: Calculation and Assignment of FreeboardDocument27 pagesST 703 Ship Design Ii: Calculation and Assignment of FreeboardJaya Sanker100% (1)
- On Basis Ship DesignDocument75 pagesOn Basis Ship DesignRENGANATHAN P100% (1)
- Ship ParticularsDocument5 pagesShip ParticularsdonmkeNo ratings yet
- Electric War Ship PDFDocument38 pagesElectric War Ship PDFSuperducksNo ratings yet
- Grounding Checklist - Attachment XXXVIDocument4 pagesGrounding Checklist - Attachment XXXVIFaiqah AzmirNo ratings yet
- Paket Bahasa Inggris MaritimDocument19 pagesPaket Bahasa Inggris MaritimAbdul HakimNo ratings yet
- Malaysia Aviation LawDocument87 pagesMalaysia Aviation LawMartin GohNo ratings yet
- Codruta Pricop - GMDSS - GOCDocument283 pagesCodruta Pricop - GMDSS - GOCVizureanu Ionut100% (2)
- Cargo Handling PDFDocument26 pagesCargo Handling PDFRivano Tetrapoik100% (1)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Propulsion of Offshore Support VesselsDocument8 pagesPropulsion of Offshore Support VesselsPatrick Araujo RamalhoNo ratings yet
- 3.2 Design Development of Corrugated BulkheadsDocument17 pages3.2 Design Development of Corrugated BulkheadsТеодора Недялкова100% (1)
- Double Bollards - Din 82607Document1 pageDouble Bollards - Din 82607Anca GeaninaNo ratings yet
- E04-Ship Geometry & Hydrostatic CalculationsDocument2 pagesE04-Ship Geometry & Hydrostatic Calculationsarise tettehNo ratings yet
- 15.1.1d Bulkheads 2Document14 pages15.1.1d Bulkheads 2vickyNo ratings yet
- List of Alloys PDFDocument9 pagesList of Alloys PDFप्रिँसप्रियमNo ratings yet
- SSC 418Document150 pagesSSC 418Lenin ValerioNo ratings yet
- Anchor Chain Locker Volume CalculationDocument1 pageAnchor Chain Locker Volume Calculationbasant_konatNo ratings yet
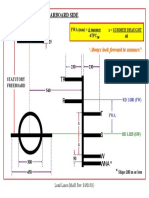
- Load Line DiagramDocument1 pageLoad Line DiagramBharatiyulamNo ratings yet
- Intro To NADocument11 pagesIntro To NAAnshuman SharmaNo ratings yet
- MV AzzirDocument106 pagesMV AzzirDominic VillamanteNo ratings yet
- Air Lubrication System For Cost Efficient Shipping PDFDocument42 pagesAir Lubrication System For Cost Efficient Shipping PDFRifat AzadNo ratings yet
- Explanatory Notes To The Solas Chapter II-1 Subdivision andDocument35 pagesExplanatory Notes To The Solas Chapter II-1 Subdivision andWong Yong WaiNo ratings yet
- Effect of Shift of Cargo On StabilityDocument4 pagesEffect of Shift of Cargo On StabilityMahdi Bordbar100% (1)
- 5 Longitudinal StreghtDocument24 pages5 Longitudinal StreghtSiOlyel Mst 'd-caLm'No ratings yet
- Light Ship and Tonnage Check ListDocument9 pagesLight Ship and Tonnage Check ListLegend AnbuNo ratings yet
- HullStandards PDFDocument246 pagesHullStandards PDFarokiarajprabhuNo ratings yet
- Safe Working LoadDocument16 pagesSafe Working LoadHugo Vco RvaNo ratings yet
- TestDocument8 pagesTestGeorge Cristian100% (1)
- Stability Calculation - Ship - Pro Bang Doyo: Loadcase - Loadcase 1 Damage Case - IntactDocument2 pagesStability Calculation - Ship - Pro Bang Doyo: Loadcase - Loadcase 1 Damage Case - IntactFirdania AmeliaNo ratings yet
- Rudder CalculationDocument2 pagesRudder Calculationlawanted100% (1)
- RB - Aluminium A60 Hinged DoorDocument2 pagesRB - Aluminium A60 Hinged DoorHayden Kyle KeigleyNo ratings yet
- Damage Stability Assessment of ContainershipDocument18 pagesDamage Stability Assessment of ContainershipgksahaNo ratings yet
- Schottel: For The Shipping World Steering A Tractor TugDocument4 pagesSchottel: For The Shipping World Steering A Tractor TuglacothNo ratings yet
- Product Sheet Stan Tug 1606Document2 pagesProduct Sheet Stan Tug 1606Roda NiagaNo ratings yet
- The Technical University of Norway: Norwegian Ship Model Experiment TankDocument56 pagesThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranNo ratings yet
- W12 Guidelines For Shipboard Hability RequirementsDocument46 pagesW12 Guidelines For Shipboard Hability RequirementsSuperducksNo ratings yet
- Rule Based Ship DesignDocument21 pagesRule Based Ship DesignSuperducksNo ratings yet
- DK1133 Partb PDFDocument168 pagesDK1133 Partb PDFSuperducksNo ratings yet
- SRS 285Document169 pagesSRS 285SuperducksNo ratings yet
- Mechanical Wear Fundamentals and Testing Part ADocument204 pagesMechanical Wear Fundamentals and Testing Part ASuperducksNo ratings yet
- 04000300Document78 pages04000300falcon001No ratings yet
- 44i LAB ManualDocument32 pages44i LAB ManualSuperducksNo ratings yet
- BMW MT Training 0305Document68 pagesBMW MT Training 0305Superducks100% (1)
- 2005 05Document393 pages2005 05Kenneth LeeNo ratings yet
- The Offshoring of Engineering - 12067Document240 pagesThe Offshoring of Engineering - 12067SuperducksNo ratings yet
- Mil 271 Requirments For NDT MethodsDocument99 pagesMil 271 Requirments For NDT MethodsSuperducksNo ratings yet
- Mil STD 167Document16 pagesMil STD 167Superducks100% (1)
- 2005 05Document393 pages2005 05Kenneth LeeNo ratings yet
- John Winter Learning Activity Lesson Plan For Activity 1 and 2Document5 pagesJohn Winter Learning Activity Lesson Plan For Activity 1 and 2SuperducksNo ratings yet
- Shell and Tube ManualDocument48 pagesShell and Tube ManualSuperducksNo ratings yet
- Tribon M3 Training Lines (Production)Document188 pagesTribon M3 Training Lines (Production)Superducks100% (2)
- Leighton Stealth - Pipelay Barge (26092011)Document7 pagesLeighton Stealth - Pipelay Barge (26092011)pssrijit100% (1)
- Indonesias Maritime Security Ongoing Problems and Strategic ImplicationsDocument13 pagesIndonesias Maritime Security Ongoing Problems and Strategic ImplicationsAgus Santoso0% (1)
- Regional Container Lines of Singapore Vs The Netherlands Insurance CoDocument9 pagesRegional Container Lines of Singapore Vs The Netherlands Insurance CoJan Igor GalinatoNo ratings yet
- 10 Largest Container Shipping Companies in The WorldDocument11 pages10 Largest Container Shipping Companies in The WorldRonald Landicho RamosNo ratings yet
- PCGA Flotilla Handbook - Web VersionDocument10 pagesPCGA Flotilla Handbook - Web VersionLyel LimNo ratings yet
- Full Download Test Bank For Fundamentals of Corporate Finance 12th Edition Stephen Ross Randolph Westerfield Bradford Jordan PDF FreeDocument32 pagesFull Download Test Bank For Fundamentals of Corporate Finance 12th Edition Stephen Ross Randolph Westerfield Bradford Jordan PDF Freeyeansaintishv8cw9a100% (13)
- Hihgjack ShipsDocument7 pagesHihgjack ShipsChristos KostakisNo ratings yet
- SSL SABARIMALAI - VSL Particulars TWSMDocument9 pagesSSL SABARIMALAI - VSL Particulars TWSMrajesh kumarNo ratings yet
- Ifr em I, 2 U1Document10 pagesIfr em I, 2 U1Cosmin IulianNo ratings yet
- Gardian 1 20m CatamaranDocument16 pagesGardian 1 20m Catamaranzelayolanda2No ratings yet
- Ilo 92 EngDocument16 pagesIlo 92 EngMehmet Akif HosanliNo ratings yet
- DO The Exercises 1-4, Ex.6 Do The Exercised 10-12, Ex.14Document3 pagesDO The Exercises 1-4, Ex.6 Do The Exercised 10-12, Ex.14ДмитрийNo ratings yet
- Curriculum Vitae LautDocument1 pageCurriculum Vitae LautIren jayacellKalialangNo ratings yet
- Permanent Way NotesDocument6 pagesPermanent Way NotesRadha KrishnanNo ratings yet
- SMC, Sem V, Seamen and ApprenticesDocument20 pagesSMC, Sem V, Seamen and Apprenticesrajat goyalNo ratings yet
- ITL Semester II Seminar Booklet 1Document29 pagesITL Semester II Seminar Booklet 1Sabyasachi GhoshNo ratings yet