You might also like
- Spill Control Valve InspectionDocument1 pageSpill Control Valve InspectionArdi AgusmanNo ratings yet
- DTC P0200-97 Injector Circuit - Open PDFDocument9 pagesDTC P0200-97 Injector Circuit - Open PDFMortada AlsonniNo ratings yet
- AC Generator ConstructionDocument4 pagesAC Generator ConstructionKen Andrie Dungaran Guariña100% (1)
- Dog House: Finished ViewDocument8 pagesDog House: Finished ViewRajesh VernekarNo ratings yet
- Speed Control of Three Phase Induction MotorDocument48 pagesSpeed Control of Three Phase Induction MotorChancy Dash100% (3)
- Diccionario Tomo 2Document924 pagesDiccionario Tomo 2Fernando Alberto Lira Gómez100% (3)
- Jma9133sa PDFDocument316 pagesJma9133sa PDFArlindo J LopesNo ratings yet
- Partial Discharge AnalysisDocument28 pagesPartial Discharge AnalysisRemya Manuel100% (3)
- Load Angle ExplanationDocument10 pagesLoad Angle ExplanationTareq AzizNo ratings yet
- Out-Of-step Protection For Generators GER-3179Document28 pagesOut-Of-step Protection For Generators GER-3179robertoseniorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Basketware Sensor Detector - Koschey-5I/IMDocument6 pagesBasketware Sensor Detector - Koschey-5I/IMSneshko Snegic100% (1)
- Parker Motori PDFDocument32 pagesParker Motori PDFpredragstojicicNo ratings yet
- Ground Differential Protection MethodsDocument9 pagesGround Differential Protection MethodsBill CaiNo ratings yet
- Energetski Pretvaraci 1 13E013EP1Document127 pagesEnergetski Pretvaraci 1 13E013EP1Zoran LalkovicNo ratings yet
- Learning Objectives: Servo ValvesDocument21 pagesLearning Objectives: Servo ValvesAkshay AggrawalNo ratings yet
- Van Deemter EquationDocument19 pagesVan Deemter EquationMohammad Sabir HussainNo ratings yet
- MASTER RAD Ivan Subotic PDFDocument82 pagesMASTER RAD Ivan Subotic PDFpero1111No ratings yet
- Block Diagram of I.C. Timer (Such As 555) and Its WorkingDocument4 pagesBlock Diagram of I.C. Timer (Such As 555) and Its Workingkaran007_m100% (3)
- Controlling Stepper Motors With A PIC MicrocontrollerDocument16 pagesControlling Stepper Motors With A PIC Microcontrollervasudeva yasasNo ratings yet
- 3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800eDocument36 pages3 Phase Ac Motor Control With VHZ Speed Closed Loop Using The 56f800ePrabhu RajNo ratings yet
- Sime Format 24 System Boiler InstDocument36 pagesSime Format 24 System Boiler InstJer CotterNo ratings yet
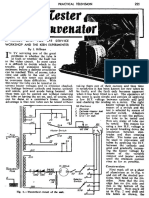
- CRT Tester RejuvenatorDocument5 pagesCRT Tester RejuvenatorTiago MianNo ratings yet
- Tester Sursa Gembird CHM 03 ManualDocument15 pagesTester Sursa Gembird CHM 03 Manualzavaidoc70No ratings yet
- USE AND MAINTENANCE INSTRUCTIONS MANUAL FOR EVM ELECTROPUMPSDocument20 pagesUSE AND MAINTENANCE INSTRUCTIONS MANUAL FOR EVM ELECTROPUMPStrantuan74No ratings yet
- Uncompromising performance for motor protection and controlDocument64 pagesUncompromising performance for motor protection and controlselamad3No ratings yet
- Types of Residual Current Devices (RCD)Document3 pagesTypes of Residual Current Devices (RCD)job_pNo ratings yet
- KDC W434 W4034 W4534 - InsDocument36 pagesKDC W434 W4034 W4534 - Insgabi_xyzNo ratings yet
- Fujitsu Dps-450sb A 450w So-319 ReportDocument1 pageFujitsu Dps-450sb A 450w So-319 ReportJohn MachoNo ratings yet
- Monte Carlo Simulation of Solar CellsDocument12 pagesMonte Carlo Simulation of Solar Cellsmani_vlsiNo ratings yet
- Braking of Electric Motors: Need..... ?Document8 pagesBraking of Electric Motors: Need..... ?Ramesh VeerNo ratings yet
- Vsi Csi With Various LoadsDocument56 pagesVsi Csi With Various LoadsDeependra RastogiNo ratings yet
- Scalar V-F Control of 3-Phase Induction Motors - 2803xDocument25 pagesScalar V-F Control of 3-Phase Induction Motors - 2803xRaghu KodiNo ratings yet
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlNo ratings yet
- Dalanderov SpojDocument2 pagesDalanderov SpojNovica BanicevicNo ratings yet
- Generator Sector Model in 2D and 3DDocument27 pagesGenerator Sector Model in 2D and 3DElvis Amerlin Condori Ch.No ratings yet
- Ryobi PCN4545 45cc ManualDocument25 pagesRyobi PCN4545 45cc ManualTholaka Senaratne100% (1)
- Classification and Function of RelaysDocument7 pagesClassification and Function of RelaysVasu BagganNo ratings yet
- 416-BF01-REDECAM-ECOSERIAL ParametersDocument1 page416-BF01-REDECAM-ECOSERIAL Parametersreinelvillar0% (1)
- 1Document15 pages1Saravanaraja KumaresanNo ratings yet
- An Serv 002 PDFDocument20 pagesAn Serv 002 PDFMario TapiaNo ratings yet
- Ups Kstar-1-3kva 120V 0.9PFDocument5 pagesUps Kstar-1-3kva 120V 0.9PFoscar mauricio caballero camachoNo ratings yet
- GsmVOX User Manual Ver50 SRBDocument28 pagesGsmVOX User Manual Ver50 SRBIvan MihajlovicNo ratings yet
- PI FHF Zm51catal en NavDocument156 pagesPI FHF Zm51catal en NavThang NguyenNo ratings yet
- Divisive Clustering Technique (DIANADocument2 pagesDivisive Clustering Technique (DIANADyah Septi AndryaniNo ratings yet
- ED1000Document4 pagesED1000Mohamed TahounNo ratings yet
- MP Series HMIDocument74 pagesMP Series HMIalfoteNo ratings yet
- Service Manual RAS1014SH4 - ENDocument122 pagesService Manual RAS1014SH4 - ENfaffsNo ratings yet
- Angular MeasurementDocument46 pagesAngular Measurementavutu_kunduruNo ratings yet
- Service Manual Acer Travelmate 5740Document268 pagesService Manual Acer Travelmate 5740mavicneNo ratings yet
- Expressing The Measurement Uncertainty of The Non-Ionizing Radiation SurveyDocument4 pagesExpressing The Measurement Uncertainty of The Non-Ionizing Radiation SurveypuljkeNo ratings yet
- MotorAnalyzer Manual PDFDocument74 pagesMotorAnalyzer Manual PDFfuto1No ratings yet
- CNC Machine OverviewDocument9 pagesCNC Machine Overviewveljko82No ratings yet
- Color Codes and Irregular Marking-SampleDocument23 pagesColor Codes and Irregular Marking-Samplemahrez laabidiNo ratings yet
- D'Arsonval Galvanometer Movement: Measuring Current Using Coil and MagnetDocument6 pagesD'Arsonval Galvanometer Movement: Measuring Current Using Coil and Magnetmohamed hemdanNo ratings yet
- AC Servo Motor Operation & ControlDocument3 pagesAC Servo Motor Operation & Controls k sahuNo ratings yet
- Estimation of Enob of A D Converter Using Histogram Test TechniqueDocument8 pagesEstimation of Enob of A D Converter Using Histogram Test TechniqueIAEME PublicationNo ratings yet
- EMI-Signal GeneratorsDocument7 pagesEMI-Signal GeneratorsVineela ThonduriNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- FM Dipol AntenaDocument2 pagesFM Dipol AntenaNebojsa_28100% (1)
- Difference Between Magnetic Storage and Optical Storage DevicesDocument1 pageDifference Between Magnetic Storage and Optical Storage DevicesKhushal GoyalNo ratings yet
- Baldor Basics PDFDocument6 pagesBaldor Basics PDFSHUBHAM SINHANo ratings yet
- Alternator Regulation (E.M.F. & M.M.F. Methods) : 1. ObjectDocument8 pagesAlternator Regulation (E.M.F. & M.M.F. Methods) : 1. Objectsajd abbasNo ratings yet
- Unit 1: The Power System Overview and ModelingDocument8 pagesUnit 1: The Power System Overview and ModelingIhuhwa Marta TauNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- BMH Manual V100 enDocument82 pagesBMH Manual V100 ensenaiadaoNo ratings yet
- Keltron Electrolytic CapacitorDocument9 pagesKeltron Electrolytic CapacitorMahesh SatheNo ratings yet
- Aquasnap Product Data 30RA 3PDDocument48 pagesAquasnap Product Data 30RA 3PDYocxan Josue Aguilar OviedoNo ratings yet
- Instruction & Safety Manual: SIL 3 Relay Output Module With Line and Load Diagnostics DIN-Rail Model D1093SDocument8 pagesInstruction & Safety Manual: SIL 3 Relay Output Module With Line and Load Diagnostics DIN-Rail Model D1093SmbidNo ratings yet
- Unit 2Document16 pagesUnit 2danishmaniNo ratings yet
- Calculate household electric usage and global consumptionDocument2 pagesCalculate household electric usage and global consumptionISsa Qafa'itiNo ratings yet
- JNTUA - B Tech - 2018 - 3 2 - Dec - R15 - EEE - 15A02603 POWER SYSTEM ANALYSISDocument2 pagesJNTUA - B Tech - 2018 - 3 2 - Dec - R15 - EEE - 15A02603 POWER SYSTEM ANALYSISVinay ChinthaNo ratings yet
- Wallace and Dadda MultipliersDocument3 pagesWallace and Dadda Multipliersnagaveni desuganiNo ratings yet
- ElectronicsForYou201401 Rotation CounterDocument2 pagesElectronicsForYou201401 Rotation CounterAnonymous JoB5ZxgNo ratings yet
- Electrical Engineering and Simulation Lab ManualDocument123 pagesElectrical Engineering and Simulation Lab ManualC.saraswathiNo ratings yet
- Velleman hpg1 Function Generator Frequency Generator hpg1 Hoja de DatosDocument28 pagesVelleman hpg1 Function Generator Frequency Generator hpg1 Hoja de DatosAbelNo ratings yet
- UTC LM324 Linear Integrated Circuit: Quad Operational AmplifiersDocument5 pagesUTC LM324 Linear Integrated Circuit: Quad Operational Amplifierseduardoguerra155_604No ratings yet
- 3.20 Fire Alarm Notification WireDocument4 pages3.20 Fire Alarm Notification WireJamesNo ratings yet
- Z77MA-G45/ Z75MA-G45 Seres: MS-7759 (v1.x) ManboardDocument146 pagesZ77MA-G45/ Z75MA-G45 Seres: MS-7759 (v1.x) ManboardSimon Dominguez ArangurenNo ratings yet
- TSS92 M210410EN D User S Guide 242996Document104 pagesTSS92 M210410EN D User S Guide 242996alvaroNo ratings yet
- Introduction To Module Bom (1) .PPSXDocument81 pagesIntroduction To Module Bom (1) .PPSXNITIN MISHRANo ratings yet
- PhysicsDocument13 pagesPhysics42,Vansh 8th DNo ratings yet
- Op AmpDocument42 pagesOp AmpJyotiSharmaNo ratings yet
- PrabhatCables Listprice ConsolidatedDocument4 pagesPrabhatCables Listprice Consolidatedusama zedanNo ratings yet
- OTDR Report: Total Fiber InformationDocument1 pageOTDR Report: Total Fiber InformationFrancisco FloresNo ratings yet
- Altistart 48 - ATS48C32QDocument5 pagesAltistart 48 - ATS48C32Qabdur rafayNo ratings yet
- The History and Generations of ComputerDocument8 pagesThe History and Generations of ComputerTamjid Ul Islam 211-11-6645No ratings yet
- SM Chapter26 PDFDocument26 pagesSM Chapter26 PDFLuis CristhianNo ratings yet
- Diagrama Fonte DeltaDocument7 pagesDiagrama Fonte DeltacesarNo ratings yet
- CFDE95Document66 pagesCFDE95vikas1612No ratings yet