International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
Remote Monitoring and Control of Boat Using
Lora Technology
R Nagarajan1, Kamlesh Kumar2, Chandan Kumar3, Pawan Kumar4
1 Professor, Department of Electrical and Electronics Engineering, Gnanamani College of Technology, Tamilnadu, India.
2,3,4 UG. Students, Department of Electrical and Electronics Engineering, Gnanamani College of Technology, India.
Abstract— This work is a prototype boat that can travel The radio frequency (RF) and wireless have been
in water. This robot is powered by rechargeable battery. around century of old development in the field of
The direction of the robot can be precise by an RF communication over a long range, for wireless radio
remote. This can be moved forward and reverse direction growths in the early 20th century. In December 1901,
by using geared motors, also this robot can take sharp Marconi done his most protruding experimentation,
turnings towards left and right directions. In this work the where he successfully transmitted Morse code from
LPC2148, DC Servomotors, RF Technology; L293D H- Cornwall, England, to St John’s, Canada. The ability of a
Bridge is used to drive the DC Servomotor. A high system to operate autonomously, carrying out tasks that
sensitive camera is also interfaced to capture the are unachievable by conventional machines, opens up an
surrounding things and also to transmit to the remote enormous range of applications that are uniquely suited to
place. The RF modules used here are STT-868 MHz automated processes requiring wireless communication
Transmitter, STR-868 MHz Receiver. The three switches over a range. Such systems need to operate over a
are connected to the RF transmitter through RF Encoder. wireless network in certain environments and achieve
The encoder constantly recites the position of the switches certain tasks [5]-[7].
and permits the data to the RF transmitter and the The wireless automation is simply referred to radio
transmitter transmits the data for further process. frequency or GSM communication over the IoT (internet
Keywords- RF Module, LPC2148, DC Servomotor, of things) platform. However, the choice of which
ATmega 16. communication platform (network based or radio
frequency based) to be used is largely dependent on the
I. INTRODUCTION nature of task to be carried out and what parameters are
In our daily life many people travel in boat. Sometime concerned with the process and particularly the cost
any atmospheric problem are occurred like landscape, effective nature of each platform to be used. Such
tsunami etc. that time people can’t be communicate for parameters as mentioned above have very vital effects
their safety purpose. This past of robotics is secured with over the nature of design. For instance, a very important
the antiquities of technology, science and the basic parameter is the range over which communication is to be
principle of movement, electricity, even pneumatics and established [8]. This determines largely what decisions
hydraulics would also be measured a part of the history of are to be made as regards the operation of the sys tem.
robotics [1]. This is because a lot of other parameters will vary as the
The timeline presented is therefore far from complete. range increases or decreases. These parameters are tied
Robotics now signifies one of manhood’s greatest primarily to the communication and the range of
activities and is the single greatest effort of mankind to communication such as cost, signal strength, receptivity
produce an artificial, feeling being. It is only in recent and the number of processes to be controlled or operated.
years that constructors are building robotics progressively On the event of comparing varying effects of these
available and possible to the overall public. The attention mentioned parameters [9],
of this timeline is to deliver the booklover with a general The RF communication is preferred for short range
overview of robotics with a focus more on traveling wireless communication. A maximum range of one
robots and to give an gratitude for the inventors and hundred meters has been chosen as the required range
innovators in this field who have helped robotics to over which communication is to be established and will
become what it is today, the science and technology determine the circumference of the work. In today’s
behind the design and manufacturing and application of world as in, wireless communication over the embedded
robots [2]-[4]. system platform has become a wide sphere of
technological possibilities as very intelligent or complex
www.ijaems.com Page | 220
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
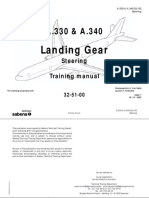
processes requiring high precision in operation can be transmitter [18]. The figure 1 shows generalized diagram
fully operated wirelessly, even from the comfort of one’s of robotic boat system.
home [10],[11].
The proposed work implemented in wireless
controlled robotic boat to travel in water. This work is
done by using RF technology for audio transmission as
well as reception. The boat is powered by 9V
rechargeable battery. The path of the boat will be precise
by an RF remote. This can be moved forward and reverse
direction. Also this robot will take severe turnings to left
and right directions. There are various type of recent
technology are being implemented such as experiments in
robotic boat localization in Oct. 2007 [12],
The RF based wireless boat control. This boat circuit Fig.1: Generalized Diagram of Robotic Boat System.
uses the RF module (Tx/Rx) for building a wireless
remote, which would be used to enterprise an output from The encoder IC HT12E encodes data or signal or
a long distant place. RF module, as the name advises, converting into serial form and then sends this signal by
uses radio frequency to send signals. These signals are using RF transmitter into the environment. At the receiver
communicated at a particular frequency and a baud rate. end used RF receiver to receive data or signal and then
A receiver can receive these signals only if it is shaped applied HT12D decoder [19]. This decoder IC converts
for that frequency. A four channel encoder/decoder all the received serial data parallel and then send these
couple have also been used in this system. The input decoded signals to motor drive IC. According to received
signals, at the transmitter side, which are taken by four data robots runs by using two DC motor in forward,
switches while the outputs are supervised on a set of four reverse, left, right and stop direction. The figure 2 shows
LEDs consistent to each input switch. The circuit can be block diagram of robotic boat system.
used for scheming remote application control system. The
outputs from the receiver can drive corresponding relays
connected to any household appliance [13]-[15].
The RF is a frequency or degree of oscillation within
the sort of about 3 Hz to 300 GHz This range matches to
frequency of irregular current electrical signals used to
harvest and perceive radio waves. The electrical currents
that vacillate at RF have unusual assets not communal by
direct current signals. One such stuff is the ease with
where it will ionize air to produce a conductive path
through air. This property is broken by 'high frequency'
units used in electric arc welding. Another special
property is an electromagnetic force The RF current to the Fig.2: Block Diagram of Robotic Boat System
surface of conductors is also driven by electromagnetic
force, known as the skin effect [16],[17]. III. TRANSMITTER and RECEIVER
Transmitter section: The RF transmitter STT-468 is
II. BLOCK DIAGRAM ideal for remote control applications where low cost and
Initially considering the entire system come across two longer range is required. The transmitter operates from a
different section, namely, transmitter section and receiver 5-12V supply, it marks ideal for many battery-powered
section. The robot is a programmable mechanical device applications. The transmitter services a SAW-stabilized
that will accomplish tasks and cooperate with its oscillator, certifying precise frequency control for best
atmosphere, In transmitter part a data encoder and RF range routine. The manufacturing-friendly SIP style
transmitter is used. In transmitter section consist four package and low-cost make the STT-468 suitable for high
push buttons to trip the robot; this four buttons are volume applications [20]. The digital data is collected
associated with encoder with respect to ground. When from the CMOS. This input is CMOS compatible and
will press any button encoder, will have a digital squat should be driven with CMOS level inputs the VCC is the
signal and then applied this signal successively to RF Operating voltage for the transmitter. The VCC should be
avoided with a .02uF ceramic capacitor and filtered with a
www.ijaems.com Page | 221
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
4.7uF tantalum capacitor. Noise on the power supply will motor which run through servo mechanism [23]. The
damage transmitter blare performance. The ANT is 50 motor which used DC supply for their operation is called
ohm antenna output. Their antenna port side impedance DC servo motor, and if it operates by AC power supply
touches output power and harmonic emissions. Antenna then it is called AC servo motor. These motors have very
can be single core wire of approximately 17cm length or high torque in a small and light weight packages. Because
PCB dash antenna. of these features they are being used in many uses like toy
B. Receiver section- Here all the data is received by the car, RC helicopters and planes, Robotics, Machine etc.
RF receiver from the antenna pin and this data is offered The figure 4 shows servo motor with its controller [24].
on the data pins. The two Data pins are provided in the The servo motors are rated in kg/cm (kilogram per
receiver module. Thus this data can be used for further centimeter) mostly servo motors are rated at 3kg/cm or
applications [21]. The figure 3 (a) and (b) shows pin 6kg/cm or 12kg/cm. This kg/cm tells how much weight
diagram of RF transmitter and receiver STR-433Mhz. the servo motor can lift at a particular distance. For
design: A 12kg/cm servo motor should be able to lift
12kg if the load is suspended 2cm away from the motors
shaft, while superior the distance then lesser the weight
carrying ability. The position of a servo motor is decided
by electrical signal and its circuitry is positioned near the
motor [25].
Fig.3 (a) Pin Diagram of RF Transmitter STR
It is a closed loop system where it uses feedback
system to control indication and final position of the
shaft, the device is precise by a feedback signal generated
by matching output signal and reference input signal.
There reference input signal is compared to reference
output signal and the third signal is creates by feedback
system. And the third signal work as input signal to
control device [26]. This signal is extant as long as
Fig.3 (b) Pin Diagram of RF Receiver STR feedback signal is generated and there is difference
between reference input signal and reference output
The RF transmitter and receiver have the advantages signal. So the key duty of servomechanism is to maintain
such as: TR Not blocked by common materials: It can output of a system at wanted value at presence of noises
penetrate most solids and pass through walls. Longer [27].
range It is not sensitive to the light and It is not much The servo contains of a Motor (DC or AC), a
sensitive to the environmental changes and weather potentiometer, gear assembly and a controlling circuit.
conditions [22]. Primarily we use gear assembly to reduce RPM and to
increase torque of motor. Say at initial pos ition of servo
IV. SERVO MOTOR AND CONTROLLER motor shaft, their location of the potentiometer handle is
ready in such a way that there is no electrical signal
produced at the output port of the potentiometer. After
words an electrical supply is given to alternative input
station of the error detector amplifier. And then difference
between these two signals, one comes from potentiometer
and alternative comes from other source, will be handled
in feedback mechanism and output will be delivered in
term of error signal. This error signal acts as the input for
motor and motor starts rotating [28].
Now motor shaft is connected with potentiometer and
as motor revolves so the potentiometer and it generates a
Fig.4 Servo Motor and Controller signal. So as the potentiometer’s angular position changes
and its output feedback signal changes. After some time
The servo motor is an electrical device which can push instant the location of potentiometer extents at a location
or rotate an object with great precision. This motor is to that the output of potentiometer is same as external signal
revolve and object at some specific angles or distance, provided. At this condition, there will not be output signal
then use servo motor. This is just made up of simple from the amplifier to the motor input as there is no
www.ijaems.com Page | 222
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
difference between external realistic signal and that signal which transforms an ac source to a dc source [31].
produced at potentiometer, and in this condition motor
stop rotating [29]. The figure 5 shows potentiometer for
servo motor control.
Fig.6 Power Supply Circuit
The AVR is a family of microcontrollers developed
by Atmel beginning in 1996. These are called modified
Fig.5 Potentiometer for Servo Motor Control Harvard architecture 8bit RISC single-chip
microcontrollers as opposed to one-time programmable
The all motors have three wires coming out of them. Out ROM, EPROM, or EEPROM used by other
of all two will be used for Supply (positive and negative) microcontrollers at the time. The AVR architecture was
and one can be used for the signal that is to be sent from perceived by two students at the Norwegian Institute of
the MCU. The servo motor is controlled by PWM (Pulse Technology (NTH).
with Modulation) which will be delivered by the control The original AVR MCU was developed at a
wires. There will be a least pulse, a full pulse and a local ASIC house in Trondheim, Norway, called Nordic
repetition rate. The servo motor can turn 90 degree from VLSI at the time, now Nordic Semiconductor, where
either direction form its neutral position. The servo motor Bogen and Wollan were working as students. It was a
supposes to see a pulse every 30 milliseconds (ms) and μRISC (Micro RISC) and was accessible as silicon
the length of the pulsation will control how far the motor IP/building block from Nordic VLSI. When that
turns. For a case, a 1.8 ms pulsation will make the motor technology is vended to Atmel from Nordic VLSI, the
turn to the 90° position, such as if pulse is shorter than 1.8 internal building was further developed by Bogen and
ms shaft moves to 0° and if it is longer than 1.8 ms than it Wollan at Atmel Norway, a secondary of Atmel. The
will turn the servo to 180° [30]. engineers functioned closely with compiler at IAR
Systems to guarantee that the AVR instruction set
V. POWER SUPPLY and MICROCONTROLLER provided effective compilation of high-level languages
The power supply circuit contains a step-down [32]
transformer which is 230/12v. In this circuit 4diodes are Atmel says that the name AVR is not an abbreviation
used to route bridge rectifier that supplies pulsating dc and does not stand for whatever in actual. The inventers
voltage and then fed to capacitor mesh and the output of the AVR give no conclusive solution as to what the
voltage which comes from rectifier is fed to filter to term "AVR" stands for conversely, it is commonly
disregard any a.c. components present even after accepted that AVR stands for Vegard's RISC processor,
rectification. The strained DC voltage is supply to the use of "AVR" in this article usually refers to the 8-bit
controller to produce 10 to 12v constant DC voltage. RISC line of Atmel AVR Microcontrollers. Among the
230V AC power will be adapted into 12V AC (12V RMS first of the AVR line is AT90S8515, which has 40-pin
value wherein the peak value is around 17V), whereas the DIP package structure in the same pin out
mandatory power is 5V DC; for this purpose, 17V AC as 8051 microcontroller, which includes the external
power must be mostly converted into DC power then it multiplexed address and data bus.
will stepped down to the 5V DC. AC power can be The following are the features of the microcontroller such
transformed into DC by rectifier. Here different types of as: Multifunction, bi-directional general-purpose I/O ports
rectifiers is used, such as half-wave rectifier, full-wave with configurable, built-in pull-up resistors. Multiple
rectifier and bridge rectifier. Due to the benefits of the internal oscillators, including RC oscillator deprived of
bridge rectifier over the half and full wave rectifier, the external parts. Interior self-programmable instruction
bridge rectifier is commonly used for transforming AC to and flash memory capacity is up to 256 KB (384 KB on
DC. The figure 6 shows the circuit of a power supply XMega). In-system programmable using serial/parallel
www.ijaems.com Page | 223
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
low-voltage exclusive interfaces or JTAG. Optional boot characters, and graphics, incorporation of a stimulating
code section with autonomous lock bits for protection. regulator into the LCD, thus, releasing the CPU of the
On-chip repairing (OCD) provision through JTAG duty of revitalizing the LCD, and ease of programming
or debug WIRE on most devices. The JTAG signals for characters and graphics [34]. The figure 8 shows the
(TMS and TCK) are multiplexed on GPIOs. This pins is image of a 16x2 LCD display.
arranged to purpose as JTAG or GPIO depending on the
venue of a fuse bit, which can be programmed via ISP or
HVSP. By default, AVR and JTAG come with the JTAG
interface enabled. Debug WIRE uses the /RESET pin as a
bi-directional communication channel to contact on-chip
debug circuitry. It is present on devices with lower pin
counts, as it only requires one pin [33].Internal
data EEPROM up to 4 KB. Internal SRAM, 16 KB
(32 KB on X Mega). External 64 KB little Indian data
space on positive models, including the Mega8516 and
Mega162. The figure 7 shows the AT mega162 Fig.8- 16x2 LCD display
microcontroller pin diagram
VI. CONCLUSION
There are number of wireless technologies are
available having different features, applications and
limitations. From above analysis it will be very useful for
wireless communication, these sources are easily
available now days, and hence the proposed system
becomes more cost effective and economical. The
proposed system will use oceanic research centers
application for interfacing RF module and controller.
REFERENCES
[1] Jan sliwka, pierre-henri reilhac, Richard leloup,
Pierre crepier, henry demalet, Patrick sittaramane”
autonomous robotic boat of ensieta”, wrsc/irsc-
2009.
[2] R.Nagarajan and M,Saravanan, “A Carrier - Based
Fig.7 AT mega162 Microcontroller Pin Diagram
Pulse Width Modulation Control Strategies for
Cascaded Multilevel Inverter,” International
The Liquid crystals are a phase of matter whose order
Review on Modeling and Simulations (IRMOS),
is in-between that of a liquid and that of a crystal. The
Vol 6.No1, pp-8-19, Feb. 2013.
particles are naturally rod shaped living matters it is
[3] M.Elangovan, R.Yuvara, S.Sathishkumar and
nearly 25 Angstroms in length and this ordering is a task
R.Nagarajan, “Modelling and Simulation of High
of temperature. Applied electric fields can be
Gain Hybrid Boost Converter,” International
controlled by molecular orientation. LCD is made by two
Journal of Emerging Technologies in Engineering
sheets of polarizing material with the liquid crystal
Research (IJETER), Volume 5, Issue 6, pp. 9- 14,
solution between it. An electric current supplied over the
June-2017
liquid heritages the crystals to bring into line so that light
[4] Farrukhehtisham,”performance evaluation of
cannot pass through them, Results on display of character
secure video transmission over wimax”,
as per the realistic voltage in its data lines. The carter is
international journal of computer networks &
provided to drive the LCD. It supplies the data of display
communications (ijcnc) vol.3, no.6, november
which transferred from the microcontroller in the internal
2011
display RAM and generates dot matrix liquid crystal
[5] Dr.R.Nagarajan, S.Sathishkumar,
driving signals. Each bit data of display RAM links to
K.Balasubramani, C.Boobalan, S.Naveen and
on/off state of a liquid crystal display. LCD is used in
N.Sridhar. “Chopper Fed Speed Control of DC
widespread applications due to the following reasons: The
Motor Using PI Controller,” IOSR- Journal of
declining prices of LCDs , ability to display numbers,
Electrical and Electronics Engineering (IOSR-
www.ijaems.com Page | 224
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
JEEE), Volume 11, Issue 3, Ver. I, pp. 65-69, May Journal of Advanced Research in Management,
– Jun. 2016. Architecture, Technology and Engineering
[6] M. Sridhar, S.Sathishkumar, R.Nagarajan and (IJARMATE). Vol.11, Issue.XII, pp. 6-10,
R.Yuvaraj, “An Integrated High Gain Boost December. 2016.
Resonant Converter for PV System,” International [15] M.Dharani Devi and R.Nagarajan,
Journal of Emerging Technologies in Engineering “Implementation of Different PWM Control
Research (IJETER), Volume 5, Issue 6, pp. 54- 59, Strategies for Cascaded MLI,” Journal of Network
June-2017. Communications and Emerging Technologies
[7] R.Prabhu, R.Nagarajan, N.Karthick and S.Suresh, (JNCET), Volume 7, Issue 7, pp. 49- 55, July-
“Implementation of Direct Sequence Spread 2017.
Spectrum Communication System Using FPGA ,” [16] M.i. ma’ruf1,m.b. othman1, sholeh h .p” audio
International Journal of Advanced Engineering, transmission using visible light communication
Management and Science (IJAEMS), Vol-3.Issue- (vlc)”, arpn journal of engineering and applied
5, pp. 488-496, May. 2017 sciences ©2006-2013 Asian research publishing
[8] Guocheng liu, nezih mrad,and dayan ban network (arpn). All rights reserved.
department of electric and computer engineering,” [17] R.Nagarajan and M, Saravanan, “Comparison of
rf-based power transmission for wireless sensors PWM Control Techniques for Cascaded Multilevel
nodes”, smart materials, structures & ndt in Inverter” International Review of Automatic
aerospace conference ndt in canada 20112 - 4 control (IRACO), Vol.5, No.6, pp. 815-828. Nov.
November 2011, montreal, quebec, canada 2012.
[9] R.Nagarajan, R.Yuvaraj, V.Hemalatha, [18] M.Dharani Devi, M.Malarvizhi and R.Nagarajan,
S.Logapriya, A.Mekala and S.Priyanga, “Development of Multicarrier SPWM Techniques
"Implementation of PV - Based Boost Converter for Cascaded MLI.” International Journal of
Using PI Controller with PSO Algorithm," Computational Engineering Research (IJCER),
International Journal of Engineering And Vol. 7, Issue 10, October 2017, pp. 44-52.
Computer Science (IJECS), Volume 6, Issue 3, pp. [19] R Rameshkumar and R Nagarajan, “Sine
20479-20484, March, 2017. Multicarrier SPWM Technique for Seven Level
[10] M.Meenakshi, R.Nagarajan, R. Banupriya and Cascaded Inverter,” CiiT-Programmable Device
M.Dharani Devi, “Stepped Multicarrier SPWM Circuits and Systems. Vol. 5, Issue- 6, 2013.
Techniques for Seven - Level Cascaded Inverter,” [20] R.Nagarajan and M,Saravanan “Staircase
International Journal of Emerging Technologies in Multicarrier SPWM Technique for Nine Level
Engineering Research (IJETER), Volume 5, Issue Cascaded Inverter,” 2013 International Conference
12, pp. 43- 49, December-2017. on Power, Energy and Control (ICPEC), IEEE
[11] R.Nagarajan, S.Sathishkumar, S.Deepika, Press, pp-668-675. 2013.
G.Keerthana, J.K.Kiruthika and R.Nandhini, [21] Irfanullah1, amjad ali, Abdul qadir khan,
"Implementation of Chopper Fed Speed Control of rehanullah khan,” wimax based audio/video
Separately Excited DC Motor Using PI transmission”, ijcsi international journal of
Controller", International Journal of Engineering computer science issues, vol. 10, issue 1, no 3,
And Computer Science (IJECS), Volume 6, Issue January 2013 issn (print): 1694-0784 | issn
3, pp. 20629-20633, March, 2017. (online): 1694-0814www.ijcsi.org
[12] Muhammad arsalan khan” rf based wireless fire [22] R.Nagarajan and M, Saravanan. “Performance
security system for hospitals”, ssu res .j. of engg. Analysis of a Novel Reduced Switch Cascaded
& tech. vol. 2. Issue 1. 2012 Multilevel Inverter,” Journal of Power Electronics,
[13] G. Vidhya Krishnan, R.Nagarajan, T. Durka, Vol.14, No.1, pp. 48-60, Jan.2014.
M.Kalaiselvi, M.Pushpa and S. Shanmuga priya, [23] S.Suresh, R.Nagarajan, R.Prabhu and
"Vehicle Communication System Using Li-Fi N.Karthick, "Energy Efficient E0 Algorithm for
Technology," International Journal of Engineering Wireless Transceivers," International Journal of
And Computer Science (IJECS), Volume 6, Issue Engineering and Computer Science (IJECS),
3, pp. 20651-20657, March 2017. Volume 6, Issue 7, July 2017, pp. 21982-
[14] R.Nagarajan, J.Chandramohan, S.Sathishkumar, 21985, DOI: 10.18535/ijecs/v6i7.15.
S.Anantharaj, G.Jayakumar, M.Visnukumar and [24] R. Banupriya, R.Nagarajan, M.Malarvizhi and
R.Viswanathan, “Implementation of PI Controller M.Dharani Devi, “Multicarrier - Based PWM
for Boost Converter in PV System,” International Control Strategies for Five - Level CMLI.” Journal
www.ijaems.com Page | 225
International Journal of Advanced Engineering, Management and Science (IJAEMS) [Vol-5, Issue-3, Mar-2019]
https://dx.doi.org/10.22161/ijaems.5.3.7 ISSN: 2454-1311
of Network Communications and Emerging [34] S.Suresh, R.Nagarajan, L.Sakthivel, V.Logesh,
Technologies (JNCET), Vol. 7, Issue 11, C.Mohandass and G.Tamilselvan, “Transmission
November - 2017, pp. 33-39. Line Fault Monitoring and Identification System
[25] Http://searchnetworking.techtarget.com/defi by Using Internet of Things ,” International Journal
nition/radio-frequency of Advanced Engineering Research and Science
[26] R.Nagarajan, J.Chandramohan, R.Yuvaraj, (IJAERS), Vol - 4.Issue - 4, pp. 9-14, Apr- 2017.
S.Sathishkumar and S.Chandran, “Performance
Analysis of Synchronous SEPIC Converter for a
Stand-Alone PV System,” International Journal of
Emerging Technologies in Engineering Research
(IJETER), Vol. 5, Issue - 5, pp. 12-16, May-2017
[27] M.Padmavathi and R.Nagarajan, “Smart
Intelligent ATM Using LABVIEW,” International
Journal of Emerging Technologies in Engineering
Research (IJETER), Volume 5, Issue 5, pp. 41- 45,
May-2017.
[28] J.Chandramohan, R.Nagarajan, K.Satheeshkumar,
N.Ajithkumar, P.A.Gopinath and S.Ranjithkumar,
"Intelligent Smart Home Automation and Security
System Using Arduino and Wi-fi,"
International Journal of Engineering And
Computer Science (IJECS), Volume 6, Issue 3, pp.
20694-20698, March, 2017.
[29] K. Anandhi and Dr. R. Nagarajan, “Mutex-Heart:
Fail Safe Dual Chamber Cardiac Pacemaker
Device with Rate Responsive Control and
Cryptographic Security,” IJSRD- International
Journal for Scientific Research & Development.
Vol. 3, Issue- 2, pp. 489-493, 2015.
[30] M.Malarvizhi, R.Nagarajan, M.Meenakshi and R.
Banupriya, “Unipolar Sine Multicarrier SPWM
Control Strategies for Seven - Level Cascaded
Inverter,” International Journal of Emerging
Technologies in Engineering Research (IJETER),
Volume 6, Issue 1, pp. 111- 117, January-2018.
[31] J.Chandramohan, R.Nagarajan, M.Ashok kumar,
T.Dineshkumar, G.Kannan and R.Prakash,
“Attendance Monitoring System of Students Based
on Biometric and GPS Tracking System,”
International Journal of Advanced Engineering,
Management and Science (IJAEMS), Vol-3.Issue-
3, pp. 241-246, Mar. 2017.
[32] N.Karthick, R.Nagarajan, S.Suresh and R.Prabhu,
"Implementation of Railway Track Crack
Detection and Protection," International Journal
Of Engineering And Computer Science (IJECS),
Volume 6, Issue 5, May 2017, pp. 21476-
21481, DOI: 10.18535/ijecs/v6i5.47
[33] S.Sathishkumar, R.Nagarajan, R.Yuvaraj, M.
Sridhar and M.Elangovan, “Implementation of
Pwm Technique For Integrated High Gain” IOSR
Journal of Engineering (IOSRJEN), Vol. 08, Issue
3, PP. 59-66, March - 2018.
www.ijaems.com Page | 226
You might also like
- COM - Doosan TX Series Servo Drive Operation Manual (Rev B01) - 131204Document92 pagesCOM - Doosan TX Series Servo Drive Operation Manual (Rev B01) - 131204Tombong100% (1)
- Microwave Transmission OverviewDocument12 pagesMicrowave Transmission OverviewJunaid MuidynNo ratings yet
- Asphalt Testing EquipmentDocument104 pagesAsphalt Testing EquipmentCooper TechnologyNo ratings yet
- LASER CommunicationDocument16 pagesLASER CommunicationarjunknarayanNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Reparat Motoras Climatizare Passat b6Document6 pagesReparat Motoras Climatizare Passat b6Liviu PopaNo ratings yet
- Incest The Victims and Their AbusersDocument5 pagesIncest The Victims and Their AbusersIjaems JournalNo ratings yet
- AR Manual Sect 4-5Document33 pagesAR Manual Sect 4-5HungNo ratings yet
- Waveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemDocument6 pagesWaveform Diversity and Electromagnetic Compatibility: Fig. 1. Airborne Intelligent Radar SystemastefanovichNo ratings yet
- Advances in Analog and RF IC Design for Wireless Communication SystemsFrom EverandAdvances in Analog and RF IC Design for Wireless Communication SystemsGabriele ManganaroRating: 1 out of 5 stars1/5 (1)
- Digital Microwave Communication PrinciplesDocument113 pagesDigital Microwave Communication Principleskaz7878No ratings yet
- Digital Microwave CommunicationDocument113 pagesDigital Microwave CommunicationRakesh Yadav100% (2)
- Fake News Detection Using Machine Learning: A ReviewDocument6 pagesFake News Detection Using Machine Learning: A ReviewIjaems JournalNo ratings yet
- 3G Evolution: HSPA and LTE for Mobile BroadbandFrom Everand3G Evolution: HSPA and LTE for Mobile BroadbandRating: 2.5 out of 5 stars2.5/5 (4)
- LTE Network Planning by Alemnew, Tigabu and MulukenDocument29 pagesLTE Network Planning by Alemnew, Tigabu and MulukenAmare Kassaw100% (2)
- Wireless Speed and Direction Control of DC Motor Using RF TechnologyDocument68 pagesWireless Speed and Direction Control of DC Motor Using RF TechnologySrinivasu Irlapati67% (12)
- Design and Implementation of An Unmanned Vehicle Using A GSM Network Without MicrocontrollersDocument8 pagesDesign and Implementation of An Unmanned Vehicle Using A GSM Network Without Microcontrollersadebayo gabrielNo ratings yet
- Relay Technology in LTE-AdvancedDocument0 pagesRelay Technology in LTE-AdvancedTrịnh Ngọc DiệpNo ratings yet
- Wireless Speed and Direction Control of DC Motor Using RF TechnologyDocument58 pagesWireless Speed and Direction Control of DC Motor Using RF Technologyuppalar196% (25)
- Progress in Electromagnetics Research C, Vol. 11, 213-228, 2009Document16 pagesProgress in Electromagnetics Research C, Vol. 11, 213-228, 2009Karloz CondeNo ratings yet
- Mini Document Part 3Document44 pagesMini Document Part 3sai chandraNo ratings yet
- Ijecet 08 01 005 PDFDocument9 pagesIjecet 08 01 005 PDFIAEME PublicationNo ratings yet
- PDFDocument18 pagesPDFAntonio DiazNo ratings yet
- Wireless RF Module Using PIC ControlerDocument76 pagesWireless RF Module Using PIC ControlerthienhayenNo ratings yet
- Design and Implementation of An Unmanned Vehicle Using A GSM Network Without MicrocontrollersDocument8 pagesDesign and Implementation of An Unmanned Vehicle Using A GSM Network Without MicrocontrollersRa muNo ratings yet
- Low Cost AvDocument5 pagesLow Cost AvrahulsundaresanNo ratings yet
- Railway Traffic ControlDocument4 pagesRailway Traffic ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Design and Performance Evaluation of OFDM-Based Wireless Services Employing Radio Over Optical Wireless Link (Document12 pagesDesign and Performance Evaluation of OFDM-Based Wireless Services Employing Radio Over Optical Wireless Link (John BergNo ratings yet
- Radio Over Fiber & WCDMADocument33 pagesRadio Over Fiber & WCDMASyed Shahzaib RazaNo ratings yet
- Vol 4-2-184-195 Mohd Hasbullah OmarDocument12 pagesVol 4-2-184-195 Mohd Hasbullah OmarDewangkara AriNo ratings yet
- IJRAR1CBP194Document5 pagesIJRAR1CBP194wira jrNo ratings yet
- 21, Rue D'artois, F-75008 PARIS: CIGRE 2010Document8 pages21, Rue D'artois, F-75008 PARIS: CIGRE 2010shaman prabhashwaraNo ratings yet
- Fibre-Optic Network Architectures For On-Board Digital Avionics Signal DistributionDocument16 pagesFibre-Optic Network Architectures For On-Board Digital Avionics Signal Distributionrumi_2kNo ratings yet
- Wireless RF Project Report For Web PDFDocument70 pagesWireless RF Project Report For Web PDFpedro100% (1)
- Radio-Over-Fiber Interesting Details, Applications.: Ukasz Prasnal, Maciej Nycz, Rados Aw Maruszak November 2010Document13 pagesRadio-Over-Fiber Interesting Details, Applications.: Ukasz Prasnal, Maciej Nycz, Rados Aw Maruszak November 2010NgocThangPham100% (1)
- Mobility Enhancement For IEEE 802.15.4 SUN-OFDM Using Channel Estimation and Viterbi Decoder With LikeDocument12 pagesMobility Enhancement For IEEE 802.15.4 SUN-OFDM Using Channel Estimation and Viterbi Decoder With LikevarshasrinithiNo ratings yet
- Technical Seminar Report Vikas PDFDocument27 pagesTechnical Seminar Report Vikas PDFVicky RNo ratings yet
- Proposal Simulation and Execution of Embedded Scheme Centred Dual Horn by Wireless TechnologyDocument5 pagesProposal Simulation and Execution of Embedded Scheme Centred Dual Horn by Wireless TechnologyKARTHIKNo ratings yet
- ADL High Throughput Satellites-Main ReportDocument20 pagesADL High Throughput Satellites-Main ReportSiapaajaNo ratings yet
- LTE-Advanced-Evolution of LTE - Radio Transmission ExperimentsDocument15 pagesLTE-Advanced-Evolution of LTE - Radio Transmission ExperimentskyfeeeNo ratings yet
- An Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing IDocument10 pagesAn Open Platform For Efficient Drone To Sensor - 2022 - Sustainable Computing InugrohoNo ratings yet
- Sensors 20 06865 v2Document33 pagesSensors 20 06865 v2China De OroNo ratings yet
- Red TactonDocument32 pagesRed TactonSrivalliNo ratings yet
- RF Communication: Companies Look For Any Advantage To Remain Competitive in Today's High-Speed BusinessDocument40 pagesRF Communication: Companies Look For Any Advantage To Remain Competitive in Today's High-Speed BusinessNaresh MaraganiNo ratings yet
- Cell Coverage Area and Link Budget Calculations in GSM SystemDocument7 pagesCell Coverage Area and Link Budget Calculations in GSM SystemMustaf MohamedNo ratings yet
- Elemen 2 Perkembangan Teknologi Pertemuan 3-1Document20 pagesElemen 2 Perkembangan Teknologi Pertemuan 3-1ponselfandi4567No ratings yet
- 01FW BeverDocument18 pages01FW BeverVarun Mech SNo ratings yet
- 30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364Document10 pages30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364helpdesk9532No ratings yet
- Microelectronics Journal: J.P. Carmo, J.H. CorreiaDocument9 pagesMicroelectronics Journal: J.P. Carmo, J.H. CorreiahzillyNo ratings yet
- 2.A Survey Study of Different RF Energy Sources For RF Energy HarvestingDocument4 pages2.A Survey Study of Different RF Energy Sources For RF Energy HarvestingDanielNo ratings yet
- DroneeDocument11 pagesDroneePedro VillarroelNo ratings yet
- 3GPP NB-IoT Coverage Extension Using LEO SatellitesDocument5 pages3GPP NB-IoT Coverage Extension Using LEO SatelliteslucasolveigaNo ratings yet
- What Is AES Encryption and How Does It WorkDocument29 pagesWhat Is AES Encryption and How Does It WorkvinodhaNo ratings yet
- Redtacton: Advanced Communication Through FleshDocument8 pagesRedtacton: Advanced Communication Through Fleshsuresho84No ratings yet
- Radio Over Fiber Thesis GSKDocument50 pagesRadio Over Fiber Thesis GSKGoosaja100% (1)
- Alagappa Chettiar College of Engineering and Technology-Karaikudi 630 004Document12 pagesAlagappa Chettiar College of Engineering and Technology-Karaikudi 630 004Ashwin JilNo ratings yet
- Real-Time Digital Signal Processing For The Generation of Optical Orthogonal Frequency-Division-Multiplexed SignalsDocument10 pagesReal-Time Digital Signal Processing For The Generation of Optical Orthogonal Frequency-Division-Multiplexed SignalsAnish BasuNo ratings yet
- Latency and Bit-Error-Rate Evaluation For Radio-Over-Ethernet in Optical Fiber Front-Haul NetworksDocument9 pagesLatency and Bit-Error-Rate Evaluation For Radio-Over-Ethernet in Optical Fiber Front-Haul NetworksSeema ChauhanNo ratings yet
- Technologies 11 00034 v2Document15 pagesTechnologies 11 00034 v2Moo NY RANo ratings yet
- Accredited by NBA, New Delhi: Ifet College of Engineering Gangarampalayam, Villupuram - 605108Document17 pagesAccredited by NBA, New Delhi: Ifet College of Engineering Gangarampalayam, Villupuram - 605108asmajaysNo ratings yet
- Cs2402-Mobile Pervasive ComputingDocument26 pagesCs2402-Mobile Pervasive ComputingAnand KannanNo ratings yet
- Transceiver Design For Processing of 5G Cellular SignalsDocument6 pagesTransceiver Design For Processing of 5G Cellular SignalsWahyu NarendrajatiNo ratings yet
- Only. This File Is Illegal.: Analysis and Simulation of Fractal Antenna For Mobile WimaxDocument8 pagesOnly. This File Is Illegal.: Analysis and Simulation of Fractal Antenna For Mobile WimaxAllison Valdez CárdenasNo ratings yet
- W-Band MIMO FMCW Radar System With Simultaneous Transmission of Orthogonal Waveforms For High-Resolution ImagingDocument14 pagesW-Band MIMO FMCW Radar System With Simultaneous Transmission of Orthogonal Waveforms For High-Resolution ImagingAitormenta17No ratings yet
- Recent Applications of HPLC in Food Analysis: A Mini ReviewDocument6 pagesRecent Applications of HPLC in Food Analysis: A Mini ReviewIjaems JournalNo ratings yet
- Current Industrial Applications of Microbial Transglutaminase: A ReviewDocument12 pagesCurrent Industrial Applications of Microbial Transglutaminase: A ReviewIjaems JournalNo ratings yet
- An Analysis On The Implementation of Multiple Intelligence-Based Character Education Management Model in Junior High Schools in Gorontalo ProvinceDocument5 pagesAn Analysis On The Implementation of Multiple Intelligence-Based Character Education Management Model in Junior High Schools in Gorontalo ProvinceIjaems JournalNo ratings yet
- Development of Integrated Learning Module On The Development of Learning DevicesDocument8 pagesDevelopment of Integrated Learning Module On The Development of Learning DevicesIjaems JournalNo ratings yet
- Different Language Usage On Social MediaDocument12 pagesDifferent Language Usage On Social MediaIjaems JournalNo ratings yet
- Analysis Industrial Robot Arm With Matlab and RoboAnalyzerDocument6 pagesAnalysis Industrial Robot Arm With Matlab and RoboAnalyzerIjaems JournalNo ratings yet
- Factors Affecting Policyholders' Satisfaction Towards Life Insurance: An Empirical Study On Life Insurance Policyholders in BangladeshDocument8 pagesFactors Affecting Policyholders' Satisfaction Towards Life Insurance: An Empirical Study On Life Insurance Policyholders in BangladeshIjaems JournalNo ratings yet
- Influence of The Time of Year On The Reproductive Efficiency of Dazu Black and Mongolian White CashmDocument6 pagesInfluence of The Time of Year On The Reproductive Efficiency of Dazu Black and Mongolian White CashmIjaems JournalNo ratings yet
- Sustainable Development Strategies of Restaurants in Cabanatuan CityDocument8 pagesSustainable Development Strategies of Restaurants in Cabanatuan CityIjaems JournalNo ratings yet
- Modelling and Optimal Viscometry Formulation Evaluation of A Modified Green Based Self-Healing Automotive PaintDocument15 pagesModelling and Optimal Viscometry Formulation Evaluation of A Modified Green Based Self-Healing Automotive PaintIjaems JournalNo ratings yet
- Effects of Intangible Assets Such As Technology and Assertive Leadership On Efficient Systems in A Cuban InstitutionDocument13 pagesEffects of Intangible Assets Such As Technology and Assertive Leadership On Efficient Systems in A Cuban InstitutionIjaems JournalNo ratings yet
- Preferred Essential Entrepreneurial Skills of Employees in The Hospitality IndustryDocument5 pagesPreferred Essential Entrepreneurial Skills of Employees in The Hospitality IndustryIjaems JournalNo ratings yet
- Model Predictive Control For Three-Phase Grid-Connected InvertersDocument7 pagesModel Predictive Control For Three-Phase Grid-Connected InvertersIjaems JournalNo ratings yet
- Understanding The Farmers' Environmental Citizenship Behaviors Towards Climate Change: The Moderating Mediating Role of Environmental Knowledge and Ascribed ResponsibilityDocument14 pagesUnderstanding The Farmers' Environmental Citizenship Behaviors Towards Climate Change: The Moderating Mediating Role of Environmental Knowledge and Ascribed ResponsibilityIjaems JournalNo ratings yet
- Correlates of Transformational and Transactional Leadership Styles of EntrepreneursDocument7 pagesCorrelates of Transformational and Transactional Leadership Styles of EntrepreneursIjaems JournalNo ratings yet
- Effect of COVID-19 Outbreak Towards Banking and Finance IndustryDocument5 pagesEffect of COVID-19 Outbreak Towards Banking and Finance IndustryIjaems JournalNo ratings yet
- Mathematical Ability, Level of Science Misconceptions, and Science Performance of First-Year College StudentsDocument7 pagesMathematical Ability, Level of Science Misconceptions, and Science Performance of First-Year College StudentsIjaems JournalNo ratings yet
- Social Media Exposure of Students in Relation To Academic PerformanceDocument8 pagesSocial Media Exposure of Students in Relation To Academic PerformanceIjaems JournalNo ratings yet
- Research Design of Grounding System For Substation, Using Soil Enhancement MaterialDocument6 pagesResearch Design of Grounding System For Substation, Using Soil Enhancement MaterialIjaems JournalNo ratings yet
- Employability of Bachelor of Science in Information Technology (BSIT) Graduates of Nueva Ecija University of Science and Technology-San Isidro CampusDocument8 pagesEmployability of Bachelor of Science in Information Technology (BSIT) Graduates of Nueva Ecija University of Science and Technology-San Isidro CampusIjaems JournalNo ratings yet
- Information Abusing of Rating Agency in "Beauty Contest"Document15 pagesInformation Abusing of Rating Agency in "Beauty Contest"Ijaems JournalNo ratings yet
- Organizational Management Cases in Hospitality Businesses in Nueva Ecija: A COVID19 ExperiencesDocument4 pagesOrganizational Management Cases in Hospitality Businesses in Nueva Ecija: A COVID19 ExperiencesIjaems JournalNo ratings yet
- Impact and Coping Mechanism of Restaurant Business Amidst Covid-19 Global PandemicDocument4 pagesImpact and Coping Mechanism of Restaurant Business Amidst Covid-19 Global PandemicIjaems JournalNo ratings yet
- Handle Assembler ValidationDocument4 pagesHandle Assembler ValidationIjaems JournalNo ratings yet
- Development of Textbooks Based On Local Wisdom For Character Building of Elementary Education StudentsDocument7 pagesDevelopment of Textbooks Based On Local Wisdom For Character Building of Elementary Education StudentsIjaems JournalNo ratings yet
- Savings Praxis of The Owners of Micro, Small and Medium Enterprises in San Antonio, Nueva Ecija: A Basis For Developing A Savings PlanDocument11 pagesSavings Praxis of The Owners of Micro, Small and Medium Enterprises in San Antonio, Nueva Ecija: A Basis For Developing A Savings PlanIjaems JournalNo ratings yet
- The Acceptability of System in Assessing The Student's Attendance Using Image ProcessingDocument5 pagesThe Acceptability of System in Assessing The Student's Attendance Using Image ProcessingIjaems JournalNo ratings yet
- An Assessment On The Factors Influencing Consumers' Participation in Social Commerce in Time of PandemicDocument8 pagesAn Assessment On The Factors Influencing Consumers' Participation in Social Commerce in Time of PandemicIjaems JournalNo ratings yet
- MultiCam Graph-X-CutterDocument9 pagesMultiCam Graph-X-CutterDaniel AustinNo ratings yet
- MeseretDocument278 pagesMeseretmeseret sisayNo ratings yet
- Leisuwash 360 Automatic Vehicle Wash System Touch Free - BrochureDocument15 pagesLeisuwash 360 Automatic Vehicle Wash System Touch Free - BrochureDiwakar RoyNo ratings yet
- Cognitive Robotics SyllabusDocument5 pagesCognitive Robotics SyllabusumeshtyagiNo ratings yet
- Servo SystemsDocument17 pagesServo SystemsAzeem .kNo ratings yet
- A Design Methodology For Distributed Control Systems To Optimize Performance in The Presence of Time DelaysDocument28 pagesA Design Methodology For Distributed Control Systems To Optimize Performance in The Presence of Time Delaysrajayu20002724No ratings yet
- Ata 32Document41 pagesAta 32Borise VinceNo ratings yet
- What Are The Types of Telemotor System in Steering Gear On ShipsDocument4 pagesWhat Are The Types of Telemotor System in Steering Gear On Shipsموبليات حسين المصريNo ratings yet
- Yaskawa SGDB ManualDocument652 pagesYaskawa SGDB ManualMichael KennaNo ratings yet
- SigmaWin+5.72 Release NotesDocument6 pagesSigmaWin+5.72 Release NotesLeoSilvaNo ratings yet
- Carwash ExpressDocument8 pagesCarwash ExpressRalph Jerald FerrerNo ratings yet
- MR J2 A Installation ManualDocument346 pagesMR J2 A Installation ManualtranhoachbnNo ratings yet
- Silent Runner Documentation 02-11-2012 PDFDocument16 pagesSilent Runner Documentation 02-11-2012 PDFniclaz001No ratings yet
- Dctorque-Km BR 000385 Reva Ecn3Document12 pagesDctorque-Km BR 000385 Reva Ecn3Basam RazNo ratings yet
- 86197-00 6Document22 pages86197-00 6Rizwan TayyabNo ratings yet
- Servo Motors and Its ApplicationsDocument19 pagesServo Motors and Its Applicationsd2electrifiersNo ratings yet
- Unit 3Document74 pagesUnit 3MOHAN RuttalaNo ratings yet
- Teknic SST System Manual Rev3.8 SST-1500Document120 pagesTeknic SST System Manual Rev3.8 SST-1500Ken DizzeruNo ratings yet
- CAT 13287683 Servo-Umrichter en PDFDocument78 pagesCAT 13287683 Servo-Umrichter en PDFcoubardNo ratings yet
- Sigma5Catalog PDFDocument392 pagesSigma5Catalog PDFAlexander Diaz AlvarezNo ratings yet
- Servo-Motor Selection-Guide en-US 2006 PDFDocument48 pagesServo-Motor Selection-Guide en-US 2006 PDFIsaac Gutierrez PayanNo ratings yet
- SynchroDocument10 pagesSynchroKei MalicdemNo ratings yet
- Replace Servo SigmaItoSigma-5ConversionGuideDocument47 pagesReplace Servo SigmaItoSigma-5ConversionGuideAndry MisfirNo ratings yet
- Preliminary ServosDocument130 pagesPreliminary Servosschool126799No ratings yet
- Pe SeriesDocument119 pagesPe SerieswahyuNo ratings yet
- IoT-Based Harvest Monitoring For Automated Fruit Picking MachineDocument2 pagesIoT-Based Harvest Monitoring For Automated Fruit Picking MachineMaan RoblesNo ratings yet