You might also like
- Laboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDocument16 pagesLaboratório de Controle 2 - Realimentacao de Estados e Rastreamento RobustoDavid AlexanderNo ratings yet
- Aula 04 Espaco EstadosDocument32 pagesAula 04 Espaco EstadosDébora MarquesNo ratings yet
- Lista 1Document1 pageLista 1EduardaNo ratings yet
- Aula 8Document20 pagesAula 8Ana Beatriz BrazNo ratings yet
- Controle II Aula 1bDocument8 pagesControle II Aula 1bLUCAS GABRIEL SILVA BARRA CORREANo ratings yet
- Exercicios 03Document2 pagesExercicios 03bpvascohotmail.comNo ratings yet
- Controle de Processos p2Document68 pagesControle de Processos p2Guilherme BenevidesNo ratings yet
- 2 - Representação Espaço Dos EstadosDocument7 pages2 - Representação Espaço Dos EstadoscarlosNo ratings yet
- Analise Aula04Document54 pagesAnalise Aula04Gabriel SilvaNo ratings yet
- 1 Lista de ExercíciosDocument11 pages1 Lista de ExercíciosFelipeBandeiraNo ratings yet
- Lista 1Document3 pagesLista 1luis volpeNo ratings yet
- DSL Aula 5Document28 pagesDSL Aula 5Mariana MoreiraNo ratings yet
- Análise No Domínio Da Frequencia - Série de Fourier 15 04 2019Document34 pagesAnálise No Domínio Da Frequencia - Série de Fourier 15 04 2019Vinicius Campos FantiNo ratings yet
- Lista 1Document4 pagesLista 1Luiz R. LimaNo ratings yet
- EEL 7052 - Prova 1Document4 pagesEEL 7052 - Prova 1Gabriel GoulartNo ratings yet
- Apostila Controle - 03 - Função de Transferência e Diagrama de BlocosDocument35 pagesApostila Controle - 03 - Função de Transferência e Diagrama de Blocoslnery_1No ratings yet
- Lista 1Document8 pagesLista 1Sâmela RochaNo ratings yet
- Notas de Aula Conceitos Básicos de Controle - 2018.2Document37 pagesNotas de Aula Conceitos Básicos de Controle - 2018.2anderssonoliveiraNo ratings yet
- Aula 02Document15 pagesAula 02Mir4 BritoNo ratings yet
- Aulas Teóricas TCS 06 - 07 (Parte 3)Document104 pagesAulas Teóricas TCS 06 - 07 (Parte 3)Rafael GagoNo ratings yet
- Prova1 2018 2Document2 pagesProva1 2018 2Carlos Aurélio Faria da RochaNo ratings yet
- 1 - Lista - SinaisDocument4 pages1 - Lista - SinaisThiagoPinheiroNo ratings yet
- 3 Lista - Fourier - RespondidaDocument11 pages3 Lista - Fourier - RespondidaHigor FerreiraNo ratings yet
- EDL ExistenciaDocument20 pagesEDL ExistenciaJoão Luiz CarvalhoNo ratings yet
- Lista de Exercícios 03Document1 pageLista de Exercícios 03Fabio HenriqueNo ratings yet
- EPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoDocument3 pagesEPC03 - Modelagem de Sistemas Dinâmicos e DiscretizaçãoCamila Yumi YachiroNo ratings yet
- Exercicios ResolvidosDocument12 pagesExercicios ResolvidosMateus Toledo100% (1)
- Prova de DinâmicaDocument3 pagesProva de DinâmicaAnonymous R1jNr3No ratings yet
- Aula 2 PDFDocument27 pagesAula 2 PDFPedro MartinsNo ratings yet
- DSL Aula 3Document27 pagesDSL Aula 3Mariana MoreiraNo ratings yet
- Analise 01 20102Document2 pagesAnalise 01 20102mpxisNo ratings yet
- Introdução A Sinais e Sistemas: Prof. Glauber BranteDocument42 pagesIntrodução A Sinais e Sistemas: Prof. Glauber BranteFabio HenriqueNo ratings yet
- Trabalho de Modelagem de Sistemas PDFDocument7 pagesTrabalho de Modelagem de Sistemas PDFViniciusNo ratings yet
- Resposta Impulsiva e ConvoluçãoDocument10 pagesResposta Impulsiva e ConvoluçãoGuilherme Fróes SilvaNo ratings yet
- Azdoc Tips-Arquivo PDFDocument20 pagesAzdoc Tips-Arquivo PDFalissonafsNo ratings yet
- Lista 02 - GabaritoDocument14 pagesLista 02 - GabaritoLucas SenaNo ratings yet
- Lista 02 - GabaritoDocument14 pagesLista 02 - GabaritoGilvan VelosoNo ratings yet
- Slit Sistemas Lineares e InvariantesDocument51 pagesSlit Sistemas Lineares e InvariantesAndré BertoniNo ratings yet
- Lista 4Document3 pagesLista 4luis volpeNo ratings yet
- Aplicação Do Método de Integração Trapezoidal em Sistemas ElétricosDocument7 pagesAplicação Do Método de Integração Trapezoidal em Sistemas Elétricosvinicis silvaNo ratings yet
- Calculo Vetorial Exercicios Resolvidos-Cap1Document14 pagesCalculo Vetorial Exercicios Resolvidos-Cap1Alexandre Calazans100% (1)
- Tema5 - Integrais de Linha e Campos VetoriaisDocument70 pagesTema5 - Integrais de Linha e Campos Vetoriaismcbneto5470No ratings yet
- Lista 02Document2 pagesLista 02Guilherme Meireles100% (1)
- Aula 4Document17 pagesAula 4Investigação OperacionalNo ratings yet
- 11354216022012cálculo III Aula 7Document21 pages11354216022012cálculo III Aula 7Roberto NascimentoNo ratings yet
- SignalsDocument9 pagesSignalsjoyNo ratings yet
- Analogia Entre Sinais e VetoresDocument21 pagesAnalogia Entre Sinais e VetoresVirgilio Jose Cambraia LopesNo ratings yet
- Sistemas EdoDocument11 pagesSistemas Edomj_sousaNo ratings yet
- ED2 ASDL Sistemas1aOrdemDocument6 pagesED2 ASDL Sistemas1aOrdemArthur Vieira de Assis MoreiraNo ratings yet
- AAP3 - Sistema - Lineares - 2022 - 2 CORRIGIDODocument9 pagesAAP3 - Sistema - Lineares - 2022 - 2 CORRIGIDOMarloni RibeiroNo ratings yet
- Lista 02Document2 pagesLista 02Daltro OliveiraNo ratings yet
- Aula 04 - Sistemas Lineares e Invariantes No TempoDocument88 pagesAula 04 - Sistemas Lineares e Invariantes No TempoPedro T V SouzaNo ratings yet
- Grand SinusDocument10 pagesGrand SinusGabriel AlvesNo ratings yet
- Lista 1 CMA211Document2 pagesLista 1 CMA211Cleber HenriqueNo ratings yet
- SSE Lista1Document7 pagesSSE Lista1Gabriel de CarvalhoNo ratings yet
- Exercicios Cap3 RespostasDocument5 pagesExercicios Cap3 RespostasGabriel MazzoniNo ratings yet
- Manual Do Consumidor Livre Ou EspecialDocument16 pagesManual Do Consumidor Livre Ou EspecialjorgedemedeirosNo ratings yet
- Manual Da Qualidade Iso 9001 2015Document37 pagesManual Da Qualidade Iso 9001 2015jorgedemedeiros100% (2)
- VLE02Document29 pagesVLE02jorgedemedeiros100% (1)
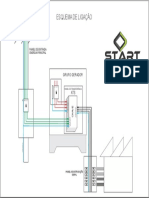
- DESENHO LIGAÇAO GERADOR AUTOMATICO-simplificado PDFDocument1 pageDESENHO LIGAÇAO GERADOR AUTOMATICO-simplificado PDFjorgedemedeirosNo ratings yet
- Número Completo. Año VII. Vol 1. Junio 2020 PDFDocument507 pagesNúmero Completo. Año VII. Vol 1. Junio 2020 PDFSebastian Andres Alejandro Mendoza Jimenez100% (1)
- Ricardo SerpaDocument24 pagesRicardo SerpaEdu MendesNo ratings yet
- 4Cs 4 AsDocument2 pages4Cs 4 AsPaola OnieskoNo ratings yet
- Reeducação Postural Global RPGDocument86 pagesReeducação Postural Global RPGBruno Henrique100% (3)
- Avaliação para Análise Criminal 1Document2 pagesAvaliação para Análise Criminal 1aldecirgomes100% (2)
- Tecnologias Aplicadas - Higiene e Segurança N TrabalhoDocument22 pagesTecnologias Aplicadas - Higiene e Segurança N TrabalhoAlexandre ManoNo ratings yet
- Pilhas e BateriasDocument11 pagesPilhas e BateriasLee WallaceNo ratings yet
- Método DeslocamentosDocument7 pagesMétodo DeslocamentosFelipe BarbieriNo ratings yet
- Matemática - Fascículo 01 - Função Exponencial e LogaritmosDocument9 pagesMatemática - Fascículo 01 - Função Exponencial e LogaritmosConcurso Vestibular100% (3)
- Freud e Jung o Que A Emocao Nao Deixou ReunirDocument14 pagesFreud e Jung o Que A Emocao Nao Deixou ReunirnaluahNo ratings yet
- Figuras de Linguagem - RevisãoDocument4 pagesFiguras de Linguagem - Revisãopedro pimentaNo ratings yet
- Aula1 PDFDocument18 pagesAula1 PDFGabriel BispoNo ratings yet
- A Chave Dos Grande Mistérios - Eliphas LeviDocument78 pagesA Chave Dos Grande Mistérios - Eliphas LeviFrederyk ChristovamNo ratings yet
- Aula 14 - Calculo de PremiosDocument26 pagesAula 14 - Calculo de PremiosVictor RamosNo ratings yet
- Classificação Peneiramento Dimensionamento 3Document10 pagesClassificação Peneiramento Dimensionamento 3felipeantunes01No ratings yet
- Polímero Da Frauda - Sequencia DidáticaDocument3 pagesPolímero Da Frauda - Sequencia DidáticaLeonardo Bruno Souza AredesNo ratings yet
- Como Organizar Um Churrasco EscopoDocument31 pagesComo Organizar Um Churrasco Escopoapi-11945274100% (4)
- Exercicios de Arte BrasileiraDocument29 pagesExercicios de Arte BrasileiraThaís Litchy100% (2)
- Apeú - SalvadorDocument5 pagesApeú - Salvadorvinirico100% (1)
- Bicicleta À ChuvaDocument3 pagesBicicleta À ChuvaCandy Jorge0% (1)
- Nelson Rodrigues - Álbum de FamíliaDocument9 pagesNelson Rodrigues - Álbum de FamíliaSilas OliveiraNo ratings yet
- Plano Nacional de Economia CriativaDocument10 pagesPlano Nacional de Economia CriativaGuga PessoasNo ratings yet
- Como Elaborar Um SLA (The Service Level Agreement)Document4 pagesComo Elaborar Um SLA (The Service Level Agreement)StoicaEspremenNo ratings yet
- Concresive 90Document3 pagesConcresive 90Klarc CamachoNo ratings yet
- Av 2 Metodologia CientíficaDocument3 pagesAv 2 Metodologia CientíficaDéboraNo ratings yet
- Plano de Rigging e de Movimentação de Cargas - Instruções GeraisDocument45 pagesPlano de Rigging e de Movimentação de Cargas - Instruções GeraisZoroastro Vilar100% (2)
- A Ultima Cronica GabaritoDocument3 pagesA Ultima Cronica GabaritoMaria QueirozNo ratings yet
- 28 - Guia - Peixes - Bacia - Rio - Tramandai - Marco - 2013 PDFDocument143 pages28 - Guia - Peixes - Bacia - Rio - Tramandai - Marco - 2013 PDFThiago NascimentoNo ratings yet
- Culturas JuvenilesDocument53 pagesCulturas JuvenilesDiana LoplagNo ratings yet
- Aspectos Ecológicos de Pteridófitas Epífitas Na Amazônia Central PDFDocument2 pagesAspectos Ecológicos de Pteridófitas Epífitas Na Amazônia Central PDFAnna Kelly NogueiraNo ratings yet