You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Additional Applications of Newton's Laws: Conceptual ProblemsDocument152 pagesAdditional Applications of Newton's Laws: Conceptual Problemsgueropapas713No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Quan - Readingtopics.bbc - Future (3) 2Document134 pagesQuan - Readingtopics.bbc - Future (3) 2Minh NguyenNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- HuhjDocument7 pagesHuhjMinh NguyenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Your Document Checklist - Immigration, Refugees and Citizenship CanadaDocument3 pagesYour Document Checklist - Immigration, Refugees and Citizenship CanadaMinh NguyenNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Speaking Part 2 IeltsDocument28 pagesSpeaking Part 2 IeltsPhuong NgoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- And of The Inverting Amplifier: in OutDocument11 pagesAnd of The Inverting Amplifier: in OutMinh NguyenNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Your Document Checklist - Immigration, Refugees and Citizenship CanadaDocument3 pagesYour Document Checklist - Immigration, Refugees and Citizenship CanadaMinh NguyenNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- And of The Inverting Amplifier: in OutDocument11 pagesAnd of The Inverting Amplifier: in OutMinh NguyenNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- IELTS Writing Task 1 SimonDocument28 pagesIELTS Writing Task 1 SimonHoang Provip100% (1)
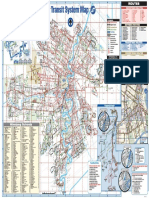
- 2016 Route Map With TransitwayDocument1 page2016 Route Map With TransitwayMinh NguyenNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Your Document Checklist - Immigration, Refugees and Citizenship CanadaDocument3 pagesYour Document Checklist - Immigration, Refugees and Citizenship CanadaMinh NguyenNo ratings yet
- New Text DocumentDocument3 pagesNew Text DocumentMinh NguyenNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- New Text DocumentDocument1 pageNew Text DocumentMinh NguyenNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- SingTel's Commitment to Sustainability and CommunityDocument9 pagesSingTel's Commitment to Sustainability and CommunityMinh NguyenNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Instruction Manual STR 155 RL-1Document24 pagesInstruction Manual STR 155 RL-1VENDI100% (3)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- MEITRACK MVT100 User Guide V2.4Document19 pagesMEITRACK MVT100 User Guide V2.4MeitrackNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- 2019 Zeta Zwheel Catalogs PDFDocument30 pages2019 Zeta Zwheel Catalogs PDFSales One - Plusgrow - IndiaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Case Study-R12 12Document81 pagesCase Study-R12 12ranjitpandeyNo ratings yet
- 1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesDocument23 pages1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesThanh XomNo ratings yet
- Next Gen Ford Ranger Digital BrochureDocument10 pagesNext Gen Ford Ranger Digital BrochureTri BureauNo ratings yet
- Contactor Cap Lc1dDocument4 pagesContactor Cap Lc1dAlfiansyah Dharma Setia DjaketraNo ratings yet
- Wrf736sdam14 - Tech - Sheet - W10811276 - Rev - B Otro Modelo de La Nevera de Oliva OcoaDocument5 pagesWrf736sdam14 - Tech - Sheet - W10811276 - Rev - B Otro Modelo de La Nevera de Oliva OcoaEdison EspinalNo ratings yet
- Power Tool Switches: Catalog 1308650 Issued 1-01Document18 pagesPower Tool Switches: Catalog 1308650 Issued 1-01Gamal AhmadNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Stop Motion Pre Production - Negotiated BriefDocument10 pagesStop Motion Pre Production - Negotiated Briefp4nd3m0n1c100% (1)
- Phase Diagrams IntroductionDocument76 pagesPhase Diagrams IntroductionGikiTopiNo ratings yet
- Biological ExerciseDocument6 pagesBiological ExerciseTanmoy BasakNo ratings yet
- Textbook of Applied ElectronicsDocument8 pagesTextbook of Applied Electronicsshehnasheh99No ratings yet
- Study of Buffer Overflows and Keyloggers in The Linux Operating SystemDocument8 pagesStudy of Buffer Overflows and Keyloggers in The Linux Operating Systemrobyrulz100% (1)
- Acee 2018 039Document13 pagesAcee 2018 039threedlabsNo ratings yet
- CS As Corporate Saviour - Oil and Gas Industry PDFDocument48 pagesCS As Corporate Saviour - Oil and Gas Industry PDFBalraj JNo ratings yet
- Twice As Sharp Operators ManualDocument34 pagesTwice As Sharp Operators ManualLeonardo CHTZNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Brandt M FR Btd500blnDocument74 pagesBrandt M FR Btd500blnStéphane JoussetNo ratings yet
- Lateral Earth Pressure TheoryDocument45 pagesLateral Earth Pressure TheoryAdel JamalNo ratings yet
- EASA Part 66 Module 7 MCQ and Essay QuestionsDocument4 pagesEASA Part 66 Module 7 MCQ and Essay QuestionsazadairNo ratings yet
- KALEKİMDocument18 pagesKALEKİMqaisalkurdyNo ratings yet
- WWW - Incar.tw-Kobelco SK 75 Service ManualDocument5 pagesWWW - Incar.tw-Kobelco SK 75 Service Manualpurnomo0% (1)
- Safety ValvesDocument11 pagesSafety Valvesravindra_jivaniNo ratings yet
- Subnetting PracticeDocument5 pagesSubnetting PracticeUncleSamNo ratings yet
- Industrial Insulation Applications: Green Engineering-1 Insulation Spreadsheets - ContentDocument55 pagesIndustrial Insulation Applications: Green Engineering-1 Insulation Spreadsheets - ContentRashel HasanNo ratings yet
- 3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureDocument4 pages3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureMohammed MustafaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Deterministic Inventory Control FormulasDocument6 pagesDeterministic Inventory Control FormulasvivekNo ratings yet
- List of Diagnostic Trouble Code (DTC)Document5 pagesList of Diagnostic Trouble Code (DTC)Dev Vrat BohraNo ratings yet
- E Voting Requirement EnggDocument7 pagesE Voting Requirement EnggDeepak KulkarniNo ratings yet
- Internship Report-1Document64 pagesInternship Report-1VIJAY SPNo ratings yet