You might also like
- Universidad Central Del Ecuador: María Belén Albán Humberto Alcivar Daniel Bahamonde Andrés TobarDocument11 pagesUniversidad Central Del Ecuador: María Belén Albán Humberto Alcivar Daniel Bahamonde Andrés TobarjrNo ratings yet
- Formato Hojas A CuadrosDocument1 pageFormato Hojas A CuadrosjrNo ratings yet
- ResumenDocument4 pagesResumenjrNo ratings yet
- Práctica 1-Gases IdealesDocument4 pagesPráctica 1-Gases IdealesjrNo ratings yet
- E StudioDocument1 pageE StudiojrNo ratings yet
- Formato Hojas A CuadrosDocument1 pageFormato Hojas A CuadrosjrNo ratings yet
- Estadística DescriptivaDocument2 pagesEstadística DescriptivajrNo ratings yet
- Resumen de BateriasDocument8 pagesResumen de BateriasjrNo ratings yet
- Clase 7Document14 pagesClase 7jrNo ratings yet
- Gerenciamiento de La Integridad de Activos (Equipos y Tuberías)Document2 pagesGerenciamiento de La Integridad de Activos (Equipos y Tuberías)jrNo ratings yet
- Corrosión SecaDocument23 pagesCorrosión SecajrNo ratings yet
- Protocolo. Práctica 7. BiorremediacionDocument2 pagesProtocolo. Práctica 7. BiorremediacionjrNo ratings yet
- Unidad No.1-1 Generalidades y Celdas Electroquímicas.Document19 pagesUnidad No.1-1 Generalidades y Celdas Electroquímicas.jrNo ratings yet
- Unidad No.1-2 Termodinámica Electroquímica y Leyes BásicasDocument20 pagesUnidad No.1-2 Termodinámica Electroquímica y Leyes BásicasjrNo ratings yet
- 1 Power Point de Objetivos Del Milenio 1-8. 2020-06-02.pptx-Fusionado PDFDocument203 pages1 Power Point de Objetivos Del Milenio 1-8. 2020-06-02.pptx-Fusionado PDFjrNo ratings yet
- Taller 3Document2 pagesTaller 3jrNo ratings yet
- Quim. General 2 Practica 8 Factores Que Afectan El Equilibrio QuimicoDocument11 pagesQuim. General 2 Practica 8 Factores Que Afectan El Equilibrio QuimicojrNo ratings yet
- BiouceDocument54 pagesBioucejrNo ratings yet
- Acondicionar Prueba LaboDocument4 pagesAcondicionar Prueba LabojrNo ratings yet
- Método de BisecciónDocument7 pagesMétodo de BisecciónjrNo ratings yet
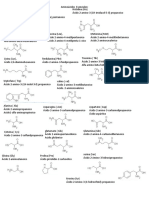
- AminoácidosDocument1 pageAminoácidosjrNo ratings yet
- Educacion Fisica 1Document9 pagesEducacion Fisica 1SAIRIS MILENA FIGUEROA CASTILLEJONo ratings yet
- Pregunta1 13Document7 pagesPregunta1 13Escobar Gabidia PragaNo ratings yet
- Autoclave AravelDocument2 pagesAutoclave AravelEdna Carolina Gutierrez CastañedaNo ratings yet
- Conjuros Clerigo Nivel 2Document2 pagesConjuros Clerigo Nivel 2Nicolàs Temachtiani Aranda AlvarezNo ratings yet
- Configuración Rectificador e Integración Baterías de Litio - Nodo - Transporte - Claro Project Fitel - V1Document33 pagesConfiguración Rectificador e Integración Baterías de Litio - Nodo - Transporte - Claro Project Fitel - V1Roger Alfaro GuevaraNo ratings yet
- Feedwater SystemDocument30 pagesFeedwater SystemIvan Poma MontesNo ratings yet
- CAPÍTULO No 2 - GEOMETRÍA ANÁLITICA EN R3Document10 pagesCAPÍTULO No 2 - GEOMETRÍA ANÁLITICA EN R3diegoNo ratings yet
- Catalogo Actualizado Colossus 4.0 25.05Document9 pagesCatalogo Actualizado Colossus 4.0 25.05CristhianNo ratings yet
- Técnicas de Identificación en Estomatología ForenseDocument53 pagesTécnicas de Identificación en Estomatología ForenseDANIELA ORTEGA MARTINEZNo ratings yet
- Codigos Error Canon Ir 1600 o 2000Document4 pagesCodigos Error Canon Ir 1600 o 2000jlsfarinas100% (1)
- Prevencion Mineria Construccion Manufactura Control 4Document5 pagesPrevencion Mineria Construccion Manufactura Control 4patricio caceresNo ratings yet
- Trabajo Final - Métodos para El Desarrollo de Competencias Fuera Del TrabajoDocument9 pagesTrabajo Final - Métodos para El Desarrollo de Competencias Fuera Del TrabajoAnaNo ratings yet
- Trabajo Pensamiento AlgoritmicoDocument5 pagesTrabajo Pensamiento AlgoritmicoJarrison VelezNo ratings yet
- Costos UnitariosDocument33 pagesCostos UnitariosmilenaNo ratings yet
- Un Hermoso Observatorio de La Oralidad: Los Géneros de Textos InstitucionalizadosDocument16 pagesUn Hermoso Observatorio de La Oralidad: Los Géneros de Textos InstitucionalizadosPaulaCNavarroNo ratings yet
- Entre Conciertos y Des-Conciertos El Juego Como Acto PolíticoDocument21 pagesEntre Conciertos y Des-Conciertos El Juego Como Acto PolíticoLucía Fernández CívicoNo ratings yet
- Presentacion Informativas Iinst GasDocument24 pagesPresentacion Informativas Iinst GasMiguel SaavedraNo ratings yet
- Metodo Cientifico PDFDocument6 pagesMetodo Cientifico PDFLuis Fernando Gomez GarzonNo ratings yet
- Espectrofotometria UVDocument64 pagesEspectrofotometria UVAlex F. Perdomo0% (1)
- Dinamica de Fluidos Unidad IIDocument65 pagesDinamica de Fluidos Unidad IICarlos Zamora50% (2)
- FAVN Submission SpanishDocument2 pagesFAVN Submission SpanishLu Salinas VignesNo ratings yet
- Formato de ConsentimientoDocument2 pagesFormato de ConsentimientoVanessa BoteroNo ratings yet
- Plan de Gestión de La TutoriaDocument11 pagesPlan de Gestión de La TutoriaSALOMON MANUELNo ratings yet
- Bobina Fija y Hierro MovilDocument5 pagesBobina Fija y Hierro MovilEmigdio MartinezNo ratings yet
- La PC Por DentroDocument348 pagesLa PC Por Dentrofredifrak50% (2)
- Inductores en Serie y ParaleloDocument2 pagesInductores en Serie y Paralelojr100% (3)
- PPE Xacbal DeltaDocument63 pagesPPE Xacbal DeltaArqued EstudioNo ratings yet
- SENA2021n2311939nenglishn6 19615e2d0bb346aDocument11 pagesSENA2021n2311939nenglishn6 19615e2d0bb346aLucy Andrea Tobon LondoñoNo ratings yet
- Taller - Formas de Expresar La Concentración de Soluciones - Quimica 1Document2 pagesTaller - Formas de Expresar La Concentración de Soluciones - Quimica 1Alex AlexNo ratings yet
- Actividad de Integración Forma ADocument4 pagesActividad de Integración Forma ACarolina ramirezNo ratings yet