You might also like
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- 1 - 2002 - Impacts of Distributed Generation On Power System Transient StabilityDocument6 pages1 - 2002 - Impacts of Distributed Generation On Power System Transient StabilityAli MNo ratings yet
- 01043465Document6 pages01043465api-3697505No ratings yet
- Transient Stability of Small GeneratorDocument8 pagesTransient Stability of Small GeneratorAnonymous BBX2E87aHNo ratings yet
- Long-Term Frequency Stability Assessment Based On Extended Frequency Response ModelDocument12 pagesLong-Term Frequency Stability Assessment Based On Extended Frequency Response ModeltusharshharmaNo ratings yet
- Fast-Frequency Response Provided by DFIG-Wind Turbines and Its Impact On The GridDocument10 pagesFast-Frequency Response Provided by DFIG-Wind Turbines and Its Impact On The GridmianNo ratings yet
- Application of Linear Sensitivity Factors For Real Time Power System Post Contingency FlowDocument17 pagesApplication of Linear Sensitivity Factors For Real Time Power System Post Contingency FlowMatthew SimeonNo ratings yet
- An Assessment of The Impact of Wind Generation On Frequency ControlDocument9 pagesAn Assessment of The Impact of Wind Generation On Frequency ControlNadil AminNo ratings yet
- Power Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyDocument5 pagesPower Devices Implementation & Analysis in ETAP: Vancha Abhilash,, Kamlesh PandeyerpublicationNo ratings yet
- Preprints202312 0781 v1Document16 pagesPreprints202312 0781 v1Merera TaresaNo ratings yet
- Critical Review On Power Oscillation Damping ControllersDocument6 pagesCritical Review On Power Oscillation Damping ControllersSonam Singh ChauhanNo ratings yet
- Freitas2005 PDFDocument7 pagesFreitas2005 PDFOMARNo ratings yet
- Trends in Power System Protection and ControlDocument8 pagesTrends in Power System Protection and ControlsaravanajsrNo ratings yet
- IRJIET704006Document9 pagesIRJIET704006DungNo ratings yet
- CH03 ElectricPowerSystemConceptsforTelecommunicationEngineers v2Document4 pagesCH03 ElectricPowerSystemConceptsforTelecommunicationEngineers v2u235861No ratings yet
- Electrical Power and Energy Systems: Swati Sondhi, Yogesh V. HoteDocument13 pagesElectrical Power and Energy Systems: Swati Sondhi, Yogesh V. Hoteshekhar yadavNo ratings yet
- Effect of DFIG Control Parameters On Small Signal Stability in Power SystemsDocument17 pagesEffect of DFIG Control Parameters On Small Signal Stability in Power SystemsHemza SellamnaNo ratings yet
- Transient Stability Analysis of Power Systems (Excel)Document17 pagesTransient Stability Analysis of Power Systems (Excel)Márcio TamashiroNo ratings yet
- Post-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsDocument9 pagesPost-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsSukhjinderNo ratings yet
- Introduction To Electromagnetic Transient Analysis of Power SystemsDocument8 pagesIntroduction To Electromagnetic Transient Analysis of Power Systemsअंकित अरोड़ाNo ratings yet
- Funnab Dr. Mathew EditedDocument30 pagesFunnab Dr. Mathew EditedATILOLA SILASNo ratings yet
- DynamicDocument7 pagesDynamicRex abbasNo ratings yet
- Been Maintained or Lost Will Remain Stable Once Disturbance Is RemovedDocument3 pagesBeen Maintained or Lost Will Remain Stable Once Disturbance Is Removedez55No ratings yet
- An Online Wide-Area Direct Coordinated Control Architecture For Power Grid Transient Stability Enhancement Based On Subspace IdentificationDocument12 pagesAn Online Wide-Area Direct Coordinated Control Architecture For Power Grid Transient Stability Enhancement Based On Subspace IdentificationtusharshharmaNo ratings yet
- Generation Planning Model Including FrequencyDocument6 pagesGeneration Planning Model Including FrequencySchult JohsNo ratings yet
- Measurement-Based Estimation of Linear Sensitivity Distribution Factors and ApplicationsDocument11 pagesMeasurement-Based Estimation of Linear Sensitivity Distribution Factors and ApplicationsamirrezafeyziNo ratings yet
- Development of Power System Stabilizer Using Modern Optimization ApproachDocument4 pagesDevelopment of Power System Stabilizer Using Modern Optimization ApproachEditor IJTSRDNo ratings yet
- Real TimecontingencyevaluationandrankingtechniqueDocument9 pagesReal TimecontingencyevaluationandrankingtechniqueSanthosh Reddy KanthalaNo ratings yet
- Disturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power SystemDocument11 pagesDisturbance Observer Based Fractional-Order Integral Sliding Mode Frequency Control Strategy For Interconnected Power Systemjitenderkumar_goyal28No ratings yet
- Transient Stability and Enhancement in Power System Research Paper PDFDocument5 pagesTransient Stability and Enhancement in Power System Research Paper PDFWaleed AbdullahNo ratings yet
- Trends in Power System ProtectionDocument8 pagesTrends in Power System ProtectionJayashree GaneshNo ratings yet
- Anuar 2020 J. Phys. Conf. Ser. 1432 012009Document8 pagesAnuar 2020 J. Phys. Conf. Ser. 1432 012009M Hassan BashirNo ratings yet
- Trends in Power System Protection and ControlDocument8 pagesTrends in Power System Protection and ControlSandeep SandyNo ratings yet
- Analyses of Indian Power System FrequencyDocument6 pagesAnalyses of Indian Power System FrequencyNanchavisNo ratings yet
- New England New York 68 Bus System Study ReportDocument8 pagesNew England New York 68 Bus System Study ReportViraj Viduranga MuthugalaNo ratings yet
- Transient Stability Performance Analysis of An Ieee 9 Bus Power System Using Facts Device P. Suresh & R. Jegedeesh KumarDocument8 pagesTransient Stability Performance Analysis of An Ieee 9 Bus Power System Using Facts Device P. Suresh & R. Jegedeesh Kumarsrinivas kNo ratings yet
- Determination of Emergency Power System Voltage Control ActionsDocument6 pagesDetermination of Emergency Power System Voltage Control ActionsLinda Carolina VasconezNo ratings yet
- TEK 150105-Chapter 3 SupplementDocument5 pagesTEK 150105-Chapter 3 SupplementCangkang SainsNo ratings yet
- Luis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityDocument58 pagesLuis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityFelix GamarraNo ratings yet
- Remedial Dan DefenseDocument10 pagesRemedial Dan DefenseAvner ChristianNo ratings yet
- Provision of Additional Inertia Support For A Power System Network Using Battery Energy Storage SystemDocument17 pagesProvision of Additional Inertia Support For A Power System Network Using Battery Energy Storage SystemPRi TOmNo ratings yet
- An Overview of Probabilistic Aspects of Harmonics: State of The Art and New DevelopmentsDocument4 pagesAn Overview of Probabilistic Aspects of Harmonics: State of The Art and New Developmentsfranchisca9999No ratings yet
- DynamicDemand As On IEEE Site 1Document9 pagesDynamicDemand As On IEEE Site 1AlejandroHerreraGurideChileNo ratings yet
- A Survey of Traveling Wave Protection Schemes in Electric Power SystemsDocument21 pagesA Survey of Traveling Wave Protection Schemes in Electric Power SystemsHamed ShakouriNo ratings yet
- Computer Power System AnalysisDocument155 pagesComputer Power System AnalysisSamir ElabasiryNo ratings yet
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocument78 pagesTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNo ratings yet
- Applied Sciences: Virtual Inertia: Current Trends and Future DirectionsDocument29 pagesApplied Sciences: Virtual Inertia: Current Trends and Future DirectionsEJAZ AHMADNo ratings yet
- Neuro-Fuzzy Approach For Fault Location and Diagnosis Using Online Learning SystemDocument8 pagesNeuro-Fuzzy Approach For Fault Location and Diagnosis Using Online Learning SystemWilliams A.Subanth Assistant ProfessorNo ratings yet
- Transient Stability AnalysisDocument6 pagesTransient Stability AnalysisAmbachew A.0% (1)
- Transient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinDocument18 pagesTransient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinAnuroop BansodNo ratings yet
- Analisis de Perturbaciones en Sistemas Interconectados de PotenciaDocument189 pagesAnalisis de Perturbaciones en Sistemas Interconectados de PotenciaRicardo FalcónNo ratings yet
- Weak Bus For STATCOMDocument7 pagesWeak Bus For STATCOMChâu TúNo ratings yet
- 2 Ijeeerfeb20172Document10 pages2 Ijeeerfeb20172TJPRC PublicationsNo ratings yet
- Guest Editorial: Oscillations in Power Systems With High Penetration of Renewable Power GenerationsDocument3 pagesGuest Editorial: Oscillations in Power Systems With High Penetration of Renewable Power Generationsmachine learningNo ratings yet
- 6561 SynchrophasorsDistribution RM 20121030 WebDocument7 pages6561 SynchrophasorsDistribution RM 20121030 WebBogdan VicolNo ratings yet
- FrequencyControlWhitePaper FinalDocument13 pagesFrequencyControlWhitePaper Finalluis garcesNo ratings yet
- Lectura 01Document5 pagesLectura 01RODY DANTE MONTOYA QUISPENo ratings yet
- Us 5483462Document17 pagesUs 5483462c_h_v_k_rNo ratings yet
- Dynamic Frequency Support With DFIG WindDocument7 pagesDynamic Frequency Support With DFIG WindHải Đăng LêNo ratings yet
- Mojtaba K 2009Document4 pagesMojtaba K 2009segeluluNo ratings yet
- Curriculum Vitae: Education and QualificationDocument3 pagesCurriculum Vitae: Education and QualificationMahdi HassanNo ratings yet
- المواد المرمزة والمطلوبة ترميزها بملف واحدDocument247 pagesالمواد المرمزة والمطلوبة ترميزها بملف واحدMahdi HassanNo ratings yet
- Fast Exact Euclidean Distance (FEED) : A New Class of Adaptable Distance TransformsDocument14 pagesFast Exact Euclidean Distance (FEED) : A New Class of Adaptable Distance TransformsMahdi HassanNo ratings yet
- Cert of OriginDocument1 pageCert of OriginMahdi HassanNo ratings yet
- World Federation of Engineering Organizations 2019 Awards Select OneDocument3 pagesWorld Federation of Engineering Organizations 2019 Awards Select OneMahdi HassanNo ratings yet
- Lai& I:ul /1: !, / T / / /:tiillDocument4 pagesLai& I:ul /1: !, / T / / /:tiillMahdi HassanNo ratings yet
- المستندDocument5 pagesالمستندMahdi HassanNo ratings yet
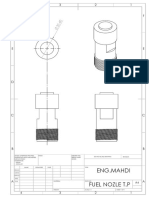
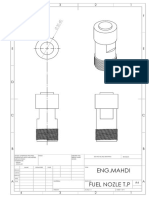
- Part1 PDFDocument1 pagePart1 PDFMahdi HassanNo ratings yet
- Invites Tender ForDocument2 pagesInvites Tender ForMahdi HassanNo ratings yet
- Id!Jtjvr! - Q.Er - QLRRR: Bofd)Document12 pagesId!Jtjvr! - Q.Er - QLRRR: Bofd)Mahdi HassanNo ratings yet
- Gear Design PDFDocument6 pagesGear Design PDFMahdi HassanNo ratings yet
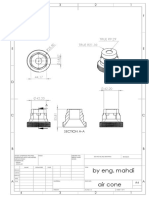
- Air Cone by Eng. Mahdi: TRUE R9.29 TRUE R21.10Document1 pageAir Cone by Eng. Mahdi: TRUE R9.29 TRUE R21.10Mahdi HassanNo ratings yet
- Part1 PDFDocument1 pagePart1 PDFMahdi HassanNo ratings yet
- Generator GeneratorDocument6 pagesGenerator GeneratorMahdi HassanNo ratings yet
- Gas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerDocument1 pageGas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerMahdi HassanNo ratings yet
- Gas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerDocument1 pageGas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerMahdi HassanNo ratings yet
- Gas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerDocument1 pageGas Turbine Download: Bearing Rotor Loadgear Accessory Gear Generator TrasformerMahdi HassanNo ratings yet
- Numerical MethodsDocument43 pagesNumerical Methodsshailaja rNo ratings yet
- Ecn 303 - Analytical Preliminaries: Recall: You Need The Second Derivative To Show Maximum/minimumDocument2 pagesEcn 303 - Analytical Preliminaries: Recall: You Need The Second Derivative To Show Maximum/minimumSamerNo ratings yet
- ATAR Mathematics Methods Units 3 & 4: Exam Notes For Western Australian Year 12 StudentsDocument6 pagesATAR Mathematics Methods Units 3 & 4: Exam Notes For Western Australian Year 12 StudentsMain hoon LaHorE -LaHoreEeE Fun & FactsNo ratings yet
- Calculus 1 Assignment 1Document1 pageCalculus 1 Assignment 1Md Rubaiyat BhuiyanNo ratings yet
- Partial Differential EquationsDocument152 pagesPartial Differential Equationsvahid100% (6)
- Engineering Mathematics-I PDFDocument3 pagesEngineering Mathematics-I PDFsatish100% (1)
- Calculus IIIvectorcalculus 2011Document82 pagesCalculus IIIvectorcalculus 2011Alfi LouisNo ratings yet
- Makaut Syllabus 2019Document17 pagesMakaut Syllabus 2019rrr68262No ratings yet
- Calculus Early Transcendentals 10th Edition Anton Solutions ManualDocument35 pagesCalculus Early Transcendentals 10th Edition Anton Solutions Manualcrenate.bakshish.7ca96100% (17)
- Computational Aerodynamics: Instructor: Prof. Marco PanesiDocument27 pagesComputational Aerodynamics: Instructor: Prof. Marco PanesiJeb KermanNo ratings yet
- Doku - Pub Calculus by Feliciano UyDocument83 pagesDoku - Pub Calculus by Feliciano UyLars JinNo ratings yet
- Mathematical Methods in Chemical EngineeringDocument576 pagesMathematical Methods in Chemical EngineeringAnonymous TwY8spHZJT85% (13)
- 24644.AM121 - 2020 ChalkpadDocument3 pages24644.AM121 - 2020 ChalkpadChhavi GargNo ratings yet
- 02 - Blackburn Et Al. - 2019 - Semtex A Spectral Element-Fourier Solver For TheDocument13 pages02 - Blackburn Et Al. - 2019 - Semtex A Spectral Element-Fourier Solver For Thekaizhen shiNo ratings yet
- 2nd Sem. / Common Subject: Applied Mathematics-IIDocument4 pages2nd Sem. / Common Subject: Applied Mathematics-IIFAROOQUE IQBALNo ratings yet
- Frenet SerretDocument6 pagesFrenet SerretjohnNo ratings yet
- 09 Well Test Interpretation in Hydraulically Fracture WellsDocument30 pages09 Well Test Interpretation in Hydraulically Fracture WellstauseefaroseNo ratings yet
- M.SC MathDocument22 pagesM.SC MathSonu VermaNo ratings yet
- MathDocument112 pagesMathTruc TranNo ratings yet
- Inverse Trigonometric - Inverse DerivativesDocument34 pagesInverse Trigonometric - Inverse DerivativesRinae SadikiNo ratings yet
- EC270 CH2 Math Lecture Slides WEBDocument37 pagesEC270 CH2 Math Lecture Slides WEBDavidNo ratings yet
- 20mhg01 Functions of Several VariablesDocument74 pages20mhg01 Functions of Several VariablesPradeepNo ratings yet
- Course Outline Applied Calulus II Fall 2016Document3 pagesCourse Outline Applied Calulus II Fall 2016Jhanzeb KhanNo ratings yet
- B.tech. - R09 - CSE - Academic Regulations SyllabusDocument199 pagesB.tech. - R09 - CSE - Academic Regulations SyllabusLokesh ReddyNo ratings yet
- Symmetry: Noether's Theorem and SymmetryDocument21 pagesSymmetry: Noether's Theorem and SymmetryIqra WahidNo ratings yet
- Differentiation WorksheetDocument2 pagesDifferentiation WorksheetSarahNo ratings yet
- F.Y.B.sc.-ChemistryDocument15 pagesF.Y.B.sc.-ChemistryRakesh JamesNo ratings yet
- Solution 4 PDFDocument13 pagesSolution 4 PDFToby ChengNo ratings yet
- Unit 1 Marked PDFDocument15 pagesUnit 1 Marked PDFaubweeNo ratings yet
- UMA003 Mathematics - I L T P CR 3 1 0 3.5Document1 pageUMA003 Mathematics - I L T P CR 3 1 0 3.5Priti GuptaNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (80)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)From EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No ratings yet