You might also like
- Iteratively Reweighted Algorithms For Compressive SensingDocument4 pagesIteratively Reweighted Algorithms For Compressive SensingAnonymous tsTtieMHDNo ratings yet
- Image Blending and CompositingDocument106 pagesImage Blending and CompositingAnonymous tsTtieMHDNo ratings yet
- Nonlinear Least Squares Theory - Lecture NotesDocument33 pagesNonlinear Least Squares Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Elements of Probability Theory - Lecture NotesDocument58 pagesElements of Probability Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Seamless Image Stitching in The Gradient DomainDocument12 pagesSeamless Image Stitching in The Gradient DomainAnonymous tsTtieMHDNo ratings yet
- A Survey of Multilinear Subspace Learning For Tensor DataDocument35 pagesA Survey of Multilinear Subspace Learning For Tensor DataAnonymous tsTtieMHDNo ratings yet
- Quasi Maximum Likelihood Theory - Lecture NotesDocument119 pagesQuasi Maximum Likelihood Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Lec-TimeSeries Slide Fall2012Document215 pagesLec-TimeSeries Slide Fall2012sdssd sdsNo ratings yet
- Lecture On Bootstrap - Lecture NotesDocument29 pagesLecture On Bootstrap - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Classical Least Squares Theory - Lecture NotesDocument109 pagesClassical Least Squares Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Asymptotic Least Squares Theory - Lecture NotesDocument85 pagesAsymptotic Least Squares Theory - Lecture NotesAnonymous tsTtieMHDNo ratings yet
- Quasi Maximum Likelihood - ApplicationsDocument17 pagesQuasi Maximum Likelihood - ApplicationsAnonymous tsTtieMHDNo ratings yet
- Elements of Probability TheoryDocument38 pagesElements of Probability TheoryAnonymous tsTtieMHD100% (1)
- Nonlinear Least Squares TheoryDocument20 pagesNonlinear Least Squares TheoryAnonymous tsTtieMHDNo ratings yet
- Dual Methods For The Minimization of The Total VariationDocument30 pagesDual Methods For The Minimization of The Total VariationAnonymous tsTtieMHDNo ratings yet
- Asymptotic Least Squares Theory - Part IDocument32 pagesAsymptotic Least Squares Theory - Part IAnonymous tsTtieMHDNo ratings yet
- Generalized Least Squares TheoryDocument32 pagesGeneralized Least Squares TheoryAnonymous tsTtieMHDNo ratings yet
- Duality Based Algorithms For Total Variation Regularized Image RestorationDocument24 pagesDuality Based Algorithms For Total Variation Regularized Image RestorationAnonymous tsTtieMHDNo ratings yet
- Classical Least Squares TheoryDocument35 pagesClassical Least Squares TheoryAnonymous tsTtieMHDNo ratings yet
- Statistical ConceptsDocument20 pagesStatistical ConceptsAnonymous tsTtieMHDNo ratings yet
- The Quasi-Maximum Likelihood Method: Theory ExplainedDocument25 pagesThe Quasi-Maximum Likelihood Method: Theory ExplainedmintajvshokoladeNo ratings yet
- The Structure of ImagesDocument8 pagesThe Structure of ImagesAnonymous tsTtieMHDNo ratings yet
- DP Tutorial 2Document44 pagesDP Tutorial 2justdlsNo ratings yet
- Algorithms For Efficient Computation of ConvolutionDocument30 pagesAlgorithms For Efficient Computation of ConvolutionAnonymous tsTtieMHDNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Proiecte Functii SplineDocument75 pagesProiecte Functii SplineCristina NicoNo ratings yet
- Reinforcement Learning: Russell and Norvig: CH 21Document16 pagesReinforcement Learning: Russell and Norvig: CH 21ZuzarNo ratings yet
- CS3233 teaching materials now available for public useDocument28 pagesCS3233 teaching materials now available for public useXtra Terrestrial Sapiens100% (1)
- Unsupervised Learning by Suleiman M. AbdiDocument45 pagesUnsupervised Learning by Suleiman M. AbdiSuleiman GargaareNo ratings yet
- CPCS-204 Week 4: Sorting Algorithms ExplainedDocument26 pagesCPCS-204 Week 4: Sorting Algorithms ExplainedRubab AnamNo ratings yet
- Binary SearchDocument10 pagesBinary SearchvyshnaviNo ratings yet
- Lab 11Document3 pagesLab 11Katneza Katman MohlalaNo ratings yet
- Hierarchical Problem Solving Using Reinforcement Learning: Methodology and MethodsDocument107 pagesHierarchical Problem Solving Using Reinforcement Learning: Methodology and MethodsYassine FaiheNo ratings yet
- Scheduling Workover Rigs to Minimize Onshore Oil Production LossDocument15 pagesScheduling Workover Rigs to Minimize Onshore Oil Production LossdbudyNo ratings yet
- Mathematics Question BankDocument38 pagesMathematics Question BankSurabhi H NNo ratings yet
- Machine Learning AssignmentDocument55 pagesMachine Learning AssignmentAkashNo ratings yet
- Transportation ProblemDocument10 pagesTransportation Problempuneeth hNo ratings yet
- C4.5 AlgorithmDocument33 pagesC4.5 AlgorithmVarun BalotiaNo ratings yet
- Factor and Remaimder TheoremDocument4 pagesFactor and Remaimder TheoremJoann NgNo ratings yet
- Exercices - Chapter6Document3 pagesExercices - Chapter6Myummie eNo ratings yet
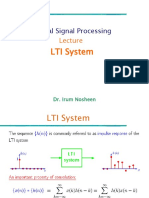
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- Signals and Systems by Kanodia-150707084730-Lva1-App6892Document128 pagesSignals and Systems by Kanodia-150707084730-Lva1-App6892saleemnasir2k715450% (2)
- Deep Learning Master ThesisDocument4 pagesDeep Learning Master Thesisdwtnpjyv100% (1)
- Credit Card Fraud Detection Using Random Forest Algorithm and CNNDocument48 pagesCredit Card Fraud Detection Using Random Forest Algorithm and CNNNexgen TechnologyNo ratings yet
- Unit 4 - Machine Learning - WWW - Rgpvnotes.inDocument16 pagesUnit 4 - Machine Learning - WWW - Rgpvnotes.inROHIT MISHRA0% (1)
- Mcse 004Document241 pagesMcse 004AarzooNo ratings yet
- L1 SKMM3023Document6 pagesL1 SKMM3023Choa Pei ShuangNo ratings yet
- Chapter 4: Signal Modeling: Digital Signal Processing (ET 4235)Document36 pagesChapter 4: Signal Modeling: Digital Signal Processing (ET 4235)Raghunandan BasavannaNo ratings yet
- Detection and Evaluation of Road Cracks and Potholes For Smart City Initiatives Using Deep LearningDocument16 pagesDetection and Evaluation of Road Cracks and Potholes For Smart City Initiatives Using Deep LearningM KIRITI SAI KUMARNo ratings yet
- The Bisection Method: Bisection Method Is Yet Another Technique For Finding A Solution To The NonlinearDocument5 pagesThe Bisection Method: Bisection Method Is Yet Another Technique For Finding A Solution To The NonlinearSatyamGuptaNo ratings yet
- Analisa PgaDocument18 pagesAnalisa PgaMila AprianiNo ratings yet
- Rutinas MATLAB NlibDocument60 pagesRutinas MATLAB NlibLdtc ZerrotNo ratings yet
- Lecture 15, MLM MatchingDocument5 pagesLecture 15, MLM MatchingGrishaNo ratings yet
- Utech Data Structures Final Exam ReviewDocument7 pagesUtech Data Structures Final Exam ReviewAaliya BurrellNo ratings yet
- Routing Algorithms Explained: Link State vs Distance VectorDocument30 pagesRouting Algorithms Explained: Link State vs Distance VectorDurga PradhyumnaNo ratings yet