You might also like
- Clase 5Document15 pagesClase 5Carlos Ramos GuerraNo ratings yet
- Clases EstaticaDocument11 pagesClases EstaticaCarlos Ramos GuerraNo ratings yet
- BIBLIO ESTÁTICADocument18 pagesBIBLIO ESTÁTICACarlos Ramos GuerraNo ratings yet
- Capitulo 3-Cuerpos RigidosDocument65 pagesCapitulo 3-Cuerpos RigidosByron OrdoñezNo ratings yet
- Ejercicios de Integrales de Línea, Superficie y VolumenFrom EverandEjercicios de Integrales de Línea, Superficie y VolumenRating: 4 out of 5 stars4/5 (2)
- U2. EquilibrioEstatico - CuerposRigidos-P5 - V04 - 20211116 - 011537-2Document70 pagesU2. EquilibrioEstatico - CuerposRigidos-P5 - V04 - 20211116 - 011537-2Juan JuradoNo ratings yet
- Guía para el análisis y solución de problemas de resistencia de materialesFrom EverandGuía para el análisis y solución de problemas de resistencia de materialesNo ratings yet
- ESTÁTICA - 3 PNG (Ve3)Document47 pagesESTÁTICA - 3 PNG (Ve3)edgar arroyoNo ratings yet
- Fuerzas Equilibrio ParticulaDocument46 pagesFuerzas Equilibrio ParticulaAndrea Martinez MontesNo ratings yet
- Universidad Nacional de Ingenieria: Facultad de Ingeniería Eléctrica y ElectrónicaDocument5 pagesUniversidad Nacional de Ingenieria: Facultad de Ingeniería Eléctrica y ElectrónicamiguelNo ratings yet
- 02 y 03 - Sist de Fuerzas EquivalentesDocument46 pages02 y 03 - Sist de Fuerzas EquivalentesDavid Ruiz AlvarezNo ratings yet
- Laboratorio Practica 1 SEPTIEMBRE 2017Document13 pagesLaboratorio Practica 1 SEPTIEMBRE 2017scribpNo ratings yet
- Torsores 2022-BDocument5 pagesTorsores 2022-BJOSE MARTIN CASADO MARQUEZNo ratings yet
- Potencia trifásica: ecuaciones y análisis circuito balanceadoDocument11 pagesPotencia trifásica: ecuaciones y análisis circuito balanceadoIris OrtegaNo ratings yet
- Diferecia de Potencial y Potencial EléctricoDocument6 pagesDiferecia de Potencial y Potencial EléctricoedwinNo ratings yet
- Marcos Isostaticos, Diagramas Axial, Cortante, FlexionanteDocument15 pagesMarcos Isostaticos, Diagramas Axial, Cortante, Flexionantemjaravalenzuela917975% (4)
- Estática I-Power PointDocument9 pagesEstática I-Power PointAlfredo LechugaNo ratings yet
- Trabajo de Fuerzas EstructuralesDocument22 pagesTrabajo de Fuerzas EstructuralesDavid TorresNo ratings yet
- PC3 - Electrotecnica PDFDocument94 pagesPC3 - Electrotecnica PDFJair Diaz CruzNo ratings yet
- Tubos de Calor MonoDocument17 pagesTubos de Calor MonoOscaric25No ratings yet
- Equilibrio de Cuerpos RigidosDocument36 pagesEquilibrio de Cuerpos RigidosKENDY VALENTINA CARPIO ALFARONo ratings yet
- Unidad IV EstaticaDocument47 pagesUnidad IV Estaticaalexadominrodri06No ratings yet
- Est - PPT - S1 - Equilibrio - EstáticaDocument32 pagesEst - PPT - S1 - Equilibrio - EstáticaJohnny MendozaNo ratings yet
- Teoria Vigas y CablesDocument12 pagesTeoria Vigas y CablesbrositoNo ratings yet
- Estatica Equilibrio S1Document29 pagesEstatica Equilibrio S1sarahpuriNo ratings yet
- Componentes de Una Fuerza y Cosenos DirectoresDocument5 pagesComponentes de Una Fuerza y Cosenos Directoressaddsa123No ratings yet
- Fuerzas sobre cuerpos geométricos sólidosDocument16 pagesFuerzas sobre cuerpos geométricos sólidosLuisAntonio AlfaroNo ratings yet
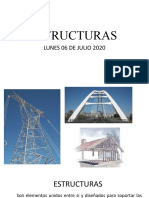
- EstructurasDocument34 pagesEstructurasJoel GarcíaNo ratings yet
- Sistemas equivalentes de fuerzas: momentos, producto vectorial y componentesDocument49 pagesSistemas equivalentes de fuerzas: momentos, producto vectorial y componentesOlga LozanoNo ratings yet
- Componentes de Una Fuerza y Cosenos DirectoresDocument5 pagesComponentes de Una Fuerza y Cosenos DirectoresNestor CentenoNo ratings yet
- FUERZASDocument8 pagesFUERZASJavier NarváezNo ratings yet
- Equilibrio de fuerzas en sistemas mecánicosDocument48 pagesEquilibrio de fuerzas en sistemas mecánicosDIEGO ALVARO ANDRADE HERRERANo ratings yet
- Flexión PuraDocument9 pagesFlexión PuraAnthony ARNo ratings yet
- Semana 3 - Clases - MiercolesDocument28 pagesSemana 3 - Clases - MiercolesMax Gonzales RojasNo ratings yet
- TC3 Grupo42Document47 pagesTC3 Grupo42ana mariaNo ratings yet
- SISTEMAS EQUIVALENTES (v1)Document56 pagesSISTEMAS EQUIVALENTES (v1)YeniferNo ratings yet
- Taller Orientado 1Document4 pagesTaller Orientado 1Cristhian Argollo SapacayoNo ratings yet
- SEMANA 3 - SESION 5 y 6 - Componentes en Tres DimensionesDocument22 pagesSEMANA 3 - SESION 5 y 6 - Componentes en Tres DimensionesFelipeNo ratings yet
- Fuerzas Internas de Una Viga ModeloDocument26 pagesFuerzas Internas de Una Viga ModeloTom DcNo ratings yet
- Componentes de Una Fuerza y Cosenos DirectoresDocument5 pagesComponentes de Una Fuerza y Cosenos DirectoresDairy Chaparro VillamizarNo ratings yet
- Ejercicios ResueltosDocument90 pagesEjercicios ResueltosEduar Harvey Hoyos CollazosNo ratings yet
- Ejercicios Semana 1 y 2Document4 pagesEjercicios Semana 1 y 2Yerli Mondragón ChinininNo ratings yet
- Vectores en 3DDocument21 pagesVectores en 3DPamela ArchivosNo ratings yet
- Tarea 1Document16 pagesTarea 1Jose Luis Llanes AraujoNo ratings yet
- 11 Semana - VIGAS DiagramasDocument11 pages11 Semana - VIGAS DiagramasGesslerLyndonMedranoSanchezNo ratings yet
- Estática: Ingeniería MecánicaDocument41 pagesEstática: Ingeniería MecánicaLennart Bruna MuñozNo ratings yet
- Auxiliar Cap 5 Equilibrio Del Cuerpo Rigido-Est p58Document92 pagesAuxiliar Cap 5 Equilibrio Del Cuerpo Rigido-Est p58d o100% (1)
- Capitulo 15Document40 pagesCapitulo 15Ricardo OrtizNo ratings yet
- Tema 11-Equilibrio EstáticoDocument34 pagesTema 11-Equilibrio EstáticoAldo OE91% (45)
- Estática A - Fuerzas Internas en Miembros Estructurales. Vigas y Clasificación Marcos y PorticosDocument26 pagesEstática A - Fuerzas Internas en Miembros Estructurales. Vigas y Clasificación Marcos y PorticosCarlos Edgardo Rodriguez BenitesNo ratings yet
- Equilibrio de Cuerpos RigidosDocument43 pagesEquilibrio de Cuerpos RigidosVictor MerlanoNo ratings yet
- El Cálculo de Los Esfuerzos de CompresiónDocument21 pagesEl Cálculo de Los Esfuerzos de CompresiónDisman D'smNo ratings yet
- TS 04Document37 pagesTS 04Eden JaraNo ratings yet
- Equilibrio de Cuerpos Rigidos 2023-2Document43 pagesEquilibrio de Cuerpos Rigidos 2023-2jeffer2storyNo ratings yet
- Plan de Gestión de La IntegracionDocument45 pagesPlan de Gestión de La IntegracionCarlos Ramos Guerra100% (1)
- Clase 11 - P-EDocument2 pagesClase 11 - P-ECarlos Ramos GuerraNo ratings yet
- Presupuesto #099 Señalizacion Horizontal Constructora GuerraDocument1 pagePresupuesto #099 Señalizacion Horizontal Constructora GuerraCarlos Ramos GuerraNo ratings yet
- Plan de Gestión Del AlcanceDocument11 pagesPlan de Gestión Del AlcanceCarlos Ramos GuerraNo ratings yet
- Clase 1Document9 pagesClase 1Carlos Ramos GuerraNo ratings yet
- Seguridad en ZanjasDocument103 pagesSeguridad en ZanjasEdwin RivasNo ratings yet
- Proyecto Completo de CarreterasDocument97 pagesProyecto Completo de Carreterasrodolfo201282% (38)
- Cap V - Diseno de Mezclas AsfalticasDocument15 pagesCap V - Diseno de Mezclas AsfalticasAlexandra Paola Apaza Arcata100% (1)
- Análisis y Diseño de Muros de Contención de Concreto ArmadoDocument68 pagesAnálisis y Diseño de Muros de Contención de Concreto ArmadoMarco Antonio Cabrera Peniche100% (1)
- Plan de Contingencia en SeguridadDocument26 pagesPlan de Contingencia en SeguridadCarlos Ramos GuerraNo ratings yet
- Ejemplo Panel Fotográfico ValorizacionesDocument5 pagesEjemplo Panel Fotográfico ValorizacionesCarlos Ramos GuerraNo ratings yet
- Presentacion TesisDocument8 pagesPresentacion TesisCarlos Ramos GuerraNo ratings yet
- Certificado en ISO 90012000Document112 pagesCertificado en ISO 90012000Emerson SGNo ratings yet
- Clases de VectoresDocument4 pagesClases de VectoresviktorNo ratings yet
- Din MathcadDocument144 pagesDin Mathcadjesica667100% (4)
- Capítulo 1 Preliminares Matemáticos: 1.1. Simbología y NotaciónDocument27 pagesCapítulo 1 Preliminares Matemáticos: 1.1. Simbología y NotaciónSteven MonárrezNo ratings yet
- Cálculo Integral - s12Document21 pagesCálculo Integral - s12Julio Silva ColanNo ratings yet
- Integral de LineaDocument17 pagesIntegral de LineaOdon Arestegui Sierra100% (1)
- Estática - (PG - 40 65)Document26 pagesEstática - (PG - 40 65)Alvaro ChoachiNo ratings yet
- FÍSICADocument46 pagesFÍSICABruno Sauñe IntriagoNo ratings yet
- Ejercicios para Repasar7 Producto InternoDocument3 pagesEjercicios para Repasar7 Producto InternoSalexg Geovanny100% (1)
- Calculo 4 UNAM Acatlán 2020Document10 pagesCalculo 4 UNAM Acatlán 2020Carlos Espadin MedinaNo ratings yet
- Elipses y Álgebra LinealDocument19 pagesElipses y Álgebra LinealAmIn20122No ratings yet
- Soluciones u10 m b 4esoDocument49 pagesSoluciones u10 m b 4esomlacortcorrea1308No ratings yet
- Parte 3Document11 pagesParte 3Lojana FernándezNo ratings yet
- Taller 1 PDFDocument14 pagesTaller 1 PDFVANESSA ESPEJO LEAÑONo ratings yet
- Taller Sobre VectoresDocument2 pagesTaller Sobre VectoresDiego RamirezNo ratings yet
- Orthogonal Complement EsDocument4 pagesOrthogonal Complement EsHenry RodriguezbNo ratings yet
- Teoria y Ejercicios Resueltos Vectores en El PlanoDocument15 pagesTeoria y Ejercicios Resueltos Vectores en El PlanowilifredoNo ratings yet
- Pca Matematicas Bachillerato AceleradoDocument20 pagesPca Matematicas Bachillerato Aceleradomirian quindeNo ratings yet
- Tercer Parcial Lineal 2021Document89 pagesTercer Parcial Lineal 2021Espinoza LeninNo ratings yet
- Teoria Vectores en El Espacio.Document7 pagesTeoria Vectores en El Espacio.AMYNNXXXXNo ratings yet
- Espacio vectorial con producto interno y base ortonormalDocument12 pagesEspacio vectorial con producto interno y base ortonormalMario' HernandezNo ratings yet
- Tema Isometrias 09Document12 pagesTema Isometrias 09María José FernándezNo ratings yet
- Calculo II TRABAJO PRÁCTICO No1 vectores y geometría R3Document1 pageCalculo II TRABAJO PRÁCTICO No1 vectores y geometría R3Carlos Andres Villarroel GuerreroNo ratings yet
- Apunte CVV - Hanne Van Den BoschDocument95 pagesApunte CVV - Hanne Van Den BoschjuanNo ratings yet
- Ma 124 Apuntes de ClaseDocument49 pagesMa 124 Apuntes de ClaseJessica WarrenNo ratings yet
- Mecanica para Ingenieros Estat - 3ra EdicionDocument421 pagesMecanica para Ingenieros Estat - 3ra EdicionEnrique Barajas100% (2)
- Fundamentos de OptimizaciónDocument9 pagesFundamentos de OptimizaciónJ Miguel Morales Solorzano100% (1)
- Modelado Matematico PDFDocument541 pagesModelado Matematico PDFEriika SeaNo ratings yet
- Cálculo en Varias Variables. Itop - Ingeniería CivilDocument40 pagesCálculo en Varias Variables. Itop - Ingeniería CivilLucrecia Carrasco García50% (10)
- Proyecto Final2021Document10 pagesProyecto Final2021OV GutNo ratings yet
- Cap - 1 - 02 - Puntos, Vectores, TensoresDocument81 pagesCap - 1 - 02 - Puntos, Vectores, TensoresCristian Cardenas RiveraNo ratings yet