You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Ofl FaqDocument9 pagesOfl Faqaboringid1234No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Carbon Footprint of Electricity Generation - GHGDocument4 pagesCarbon Footprint of Electricity Generation - GHGJohn Obidi100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- EL Analysis TemplateDocument15 pagesEL Analysis Templatesandeep devabhaktuniNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Photovoltaic PanelsDocument2 pagesPhotovoltaic PanelsMustun SultanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 1001fonts English Towne EulaDocument1 page1001fonts English Towne EulaRONALD GONZALEZNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 1001fonts Cimbrian EulaDocument1 page1001fonts Cimbrian Eulasandeep devabhaktuniNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Personal Use Only-User Terms AgreementDocument2 pagesPersonal Use Only-User Terms Agreementsandeep devabhaktuni100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Leadershipconceptsandtheories 120810034143 Phpapp01 PDFDocument25 pagesLeadershipconceptsandtheories 120810034143 Phpapp01 PDFRoshan TibrewalNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- How To Organize New Product Teams and Lead Them To: © 2014 Stage-Gate International Royalty Free Image byDocument29 pagesHow To Organize New Product Teams and Lead Them To: © 2014 Stage-Gate International Royalty Free Image bysandeep devabhaktuniNo ratings yet
- PN JunctionDocument60 pagesPN JunctionbingNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Ministry of New and Renewable Energy Implementation of Quality Control Order On SPV Goods 2017Document3 pagesMinistry of New and Renewable Energy Implementation of Quality Control Order On SPV Goods 2017sandeep devabhaktuniNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Learning TheoriesDocument33 pagesLearning TheoriesLakshmi KsrinivasNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Renewsys India Pvt. LTD.: Form Factor - 18 Cells Reference Drawing Numbers: Bom For C06 - 5Wp With Elmex JB Per ModuleDocument31 pagesRenewsys India Pvt. LTD.: Form Factor - 18 Cells Reference Drawing Numbers: Bom For C06 - 5Wp With Elmex JB Per Modulesandeep devabhaktuniNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Ohms LawDocument24 pagesOhms LawSaad MajeedNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Leadership Style 2Document23 pagesLeadership Style 2aqas_khanNo ratings yet
- Stage Gate: Product Development ModelDocument61 pagesStage Gate: Product Development Modelsandeep devabhaktuniNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Stage Gate Product Innovation Process: Your Company NameDocument61 pagesStage Gate Product Innovation Process: Your Company Namesandeep devabhaktuniNo ratings yet
- Stage Gate: Product Development ModelDocument61 pagesStage Gate: Product Development Modelsandeep devabhaktuniNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Stage Gate: Product Development ModelDocument61 pagesStage Gate: Product Development Modelsandeep devabhaktuniNo ratings yet
- Dimension Thickness (Si) Front BackDocument2 pagesDimension Thickness (Si) Front Backsandeep devabhaktuniNo ratings yet
- How To Organize New Product Teams and Lead Them To: © 2014 Stage-Gate International Royalty Free Image byDocument29 pagesHow To Organize New Product Teams and Lead Them To: © 2014 Stage-Gate International Royalty Free Image bysandeep devabhaktuniNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
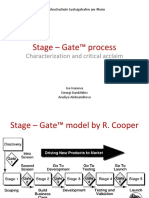
- Stage - Gate™ Process: Characterization and Critical AcclaimDocument23 pagesStage - Gate™ Process: Characterization and Critical Acclaimsandeep devabhaktuniNo ratings yet
- Pdma Process Stagegate 1210 PDFDocument41 pagesPdma Process Stagegate 1210 PDFsandeep devabhaktuniNo ratings yet
- Floating Solar Power PlantDocument24 pagesFloating Solar Power PlanttuanphamNo ratings yet
- Floating Solar PV: Maulana Azad National Institute of TechnologyDocument20 pagesFloating Solar PV: Maulana Azad National Institute of Technologysandeep devabhaktuniNo ratings yet
- Example Product Management Stage-Gate ProcessDocument1 pageExample Product Management Stage-Gate Processsandeep devabhaktuniNo ratings yet
- Detailed Project Report On Solar Module Manufacturing (60 MW)Document13 pagesDetailed Project Report On Solar Module Manufacturing (60 MW)sandeep devabhaktuniNo ratings yet
- Here UN Eets Ater: W S M WDocument37 pagesHere UN Eets Ater: W S M Wsandeep devabhaktuniNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- IRENA Solar PV Markets Report 2017 PDFDocument145 pagesIRENA Solar PV Markets Report 2017 PDFsandeep devabhaktuniNo ratings yet
- Solar Photovoltaics: We Are On The Cusp of A New Era of Energy IndependenceDocument34 pagesSolar Photovoltaics: We Are On The Cusp of A New Era of Energy Independencesandeep devabhaktuniNo ratings yet
- A Study of The Eigenvalue Analysis Capabilities ofDocument9 pagesA Study of The Eigenvalue Analysis Capabilities ofNedim HadžiaganovićNo ratings yet
- CT-LTI System Analysis: Approach #IDocument18 pagesCT-LTI System Analysis: Approach #IBAYAT MOBIN BAMIMNo ratings yet
- The Maxwell-Boltzmann DistributionDocument9 pagesThe Maxwell-Boltzmann Distributiondiego espinozaNo ratings yet
- Preney PresentationDocument33 pagesPreney PresentationMohamad ZarghampoorNo ratings yet
- Rheology of Vitrimers: Fanlong Meng, Mohand O. Saed & Eugene M. TerentjevDocument10 pagesRheology of Vitrimers: Fanlong Meng, Mohand O. Saed & Eugene M. TerentjevLinus hongNo ratings yet
- ANDTS MT Procedure Yoke Calibration FormDocument1 pageANDTS MT Procedure Yoke Calibration Formreiazh100% (1)
- Science of Spirit Excerpt For ScribdDocument86 pagesScience of Spirit Excerpt For ScribdRobert Donald TonelliNo ratings yet
- TLWDocument39 pagesTLWCandida DhasonNo ratings yet
- A Novel Micro Gripper With Parallel Movement of Gripping ArmsDocument4 pagesA Novel Micro Gripper With Parallel Movement of Gripping ArmssohailNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lec 3 Boundary Value Prob Ssi PDFDocument15 pagesLec 3 Boundary Value Prob Ssi PDFTanimunNo ratings yet
- Semester Subject Subject Name Exam Date Session: B.E. Electrical and Electronics EngineeringDocument2 pagesSemester Subject Subject Name Exam Date Session: B.E. Electrical and Electronics EngineeringBALAKRISHNANNo ratings yet
- CHAPTER 5 - STATES OF MATTER (S) Edit20152016Document12 pagesCHAPTER 5 - STATES OF MATTER (S) Edit20152016PAKK20622P Syarifah Nor Izzah binti Syed Abd HamidNo ratings yet
- Science 5 Q3Document176 pagesScience 5 Q3Dom Martinez100% (1)
- Electromagnetic Waves Regions of The EM WavesDocument73 pagesElectromagnetic Waves Regions of The EM WavesJR LubisNo ratings yet
- 312CET05 - Mechanics of Fluids Answer KeyDocument16 pages312CET05 - Mechanics of Fluids Answer Keyveenabalu200% (1)
- Moment Rotation Characteristics of Beam-Columns, Lehigh University, (1952)Document40 pagesMoment Rotation Characteristics of Beam-Columns, Lehigh University, (1952)fefahimNo ratings yet
- QuizBowl QuestionsDocument76 pagesQuizBowl Questionsedmark icalina50% (4)
- Calculations of Protective Relay SettingsDocument65 pagesCalculations of Protective Relay SettingsAngga Wira Pramana100% (12)
- Ce60 Theory of StructuresDocument2 pagesCe60 Theory of StructuresKhryzzia Maye FelicildaNo ratings yet
- RPC21-Outdoor Field Experience With Autonomous RPC Based StationsDocument11 pagesRPC21-Outdoor Field Experience With Autonomous RPC Based StationsAndré MoraisNo ratings yet
- Stochastic ResonanceDocument65 pagesStochastic ResonanceRiccardo MantelliNo ratings yet
- NRL Formulary 2019Document72 pagesNRL Formulary 2019gimliNo ratings yet
- Lagrangian Mechanics - WikipediaDocument38 pagesLagrangian Mechanics - WikipediaSoumyaranjan HarichandanNo ratings yet
- Pressure Drop CalculatorDocument5 pagesPressure Drop CalculatorNyandoro E-max Maxmore100% (4)
- Uniform Relativistic Acceleration PDFDocument15 pagesUniform Relativistic Acceleration PDFJedwin VillanuevaNo ratings yet
- 5 The Oscilloscope: ExperimentDocument31 pages5 The Oscilloscope: ExperimentbavinrajNo ratings yet
- QUESTIONS AND PROBLEMS (Anachem - Topic 1)Document4 pagesQUESTIONS AND PROBLEMS (Anachem - Topic 1)Michaella CabanaNo ratings yet
- Allotropes of IronDocument5 pagesAllotropes of IronVysakh VasudevanNo ratings yet
- Equations of Planes in The Form Ax + by + CZ DDocument4 pagesEquations of Planes in The Form Ax + by + CZ DNagesh ThotaNo ratings yet
- An Introduction To Modern CosmologyDocument189 pagesAn Introduction To Modern CosmologyDavi Neco SilvaNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (10)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)