You might also like
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Lab 07-Analysis of CCP Module For Capture, Compare and PWM: AnswerDocument2 pagesLab 07-Analysis of CCP Module For Capture, Compare and PWM: AnswerNida AliNo ratings yet
- EMP Syllabus & Lesson PlanDocument7 pagesEMP Syllabus & Lesson Plandinesh.vNo ratings yet
- An Instructional Processor Design Using VHDL and An FpgaDocument10 pagesAn Instructional Processor Design Using VHDL and An FpgaRezwan KhanNo ratings yet
- Lsi/Csi: 24-Bit Quadrature CounterDocument15 pagesLsi/Csi: 24-Bit Quadrature CounterAnsoelNo ratings yet
- Hardware Components - CPU: M1: Introduction To Embedded SystemsDocument13 pagesHardware Components - CPU: M1: Introduction To Embedded SystemsvithyaNo ratings yet
- Embedded Systems Design Part1Document61 pagesEmbedded Systems Design Part1arihant raj singhNo ratings yet
- Milestone2 Ee3043Document14 pagesMilestone2 Ee3043teoNo ratings yet
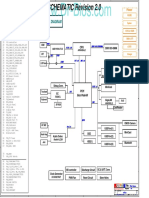
- Scheme-Asus-K42jr MB r20 Er 1112 1822 PDFDocument97 pagesScheme-Asus-K42jr MB r20 Er 1112 1822 PDFДмитрий МашковNo ratings yet
- K42 Jrmbr20er 11121822 PDFDocument97 pagesK42 Jrmbr20er 11121822 PDFAlexandru FloricicăNo ratings yet
- Surface Pro5 Calgary U23L EV4p2 Rev 2.1Document94 pagesSurface Pro5 Calgary U23L EV4p2 Rev 2.1p animeNo ratings yet
- AVR ArchitectureDocument25 pagesAVR Architectureநட்ராஜ் நாதன்No ratings yet
- Ds3231 Extremely Accurate I C-Integrated RTC/TCXO/CrystalDocument1 pageDs3231 Extremely Accurate I C-Integrated RTC/TCXO/Crystalsaad hassanNo ratings yet
- 8051 Core Microcontroller & InterfacingDocument45 pages8051 Core Microcontroller & InterfacingsumitramotadeNo ratings yet
- DLD LAB Experiment 6 2014Document8 pagesDLD LAB Experiment 6 2014Dinh LâmNo ratings yet
- PIC16C72ADocument122 pagesPIC16C72AsafsaNo ratings yet
- Block Diagram: PowerDocument96 pagesBlock Diagram: PowerBrennan GriffinNo ratings yet
- RiSC PipeDocument9 pagesRiSC PipeAir Oddy Air OddyNo ratings yet
- K42JR MB R20 Er 1112 1822Document97 pagesK42JR MB R20 Er 1112 1822Debbie Waugh-BrowneNo ratings yet
- Asus k42jr 1 Rev 2-0Document97 pagesAsus k42jr 1 Rev 2-0Tran MinhNo ratings yet
- Arm Instruction 2 - 001Document26 pagesArm Instruction 2 - 001Ankit SanghviNo ratings yet
- ICS9LPRS365: 64-Pin CK505 W/fully Integrated Voltage Regulator + Integrated Series ResistorDocument28 pagesICS9LPRS365: 64-Pin CK505 W/fully Integrated Voltage Regulator + Integrated Series ResistorAnonymous t9tLb3WgNo ratings yet
- Z490 Ud Ac Rev1.01Document63 pagesZ490 Ud Ac Rev1.01marcNo ratings yet
- 4-Analog InputDocument21 pages4-Analog InputTam PhamNo ratings yet
- University of Belgrade: School of Electrical Engineering Department of Computer ScienceDocument70 pagesUniversity of Belgrade: School of Electrical Engineering Department of Computer ScienceNicolasNo ratings yet
- Milestone 2-UpdatedDocument13 pagesMilestone 2-UpdatedHưng Nguyễn ThànhNo ratings yet
- Programmazione - AssemblerDocument36 pagesProgrammazione - AssemblerArthNo ratings yet
- Basic Computer OrganizationInstruction CycleDocument8 pagesBasic Computer OrganizationInstruction CycleHARI HARAN REDDYNo ratings yet
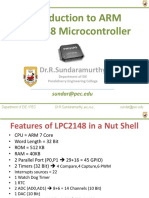
- Introduction To ARM LPC2148 Microcontroller: Dr.R.SundaramurthyDocument34 pagesIntroduction To ARM LPC2148 Microcontroller: Dr.R.SundaramurthyMohammedtajuddin TajuddinNo ratings yet
- Scheme-Asus-K42jv MB 2.0 PDFDocument96 pagesScheme-Asus-K42jv MB 2.0 PDFДмитрий МашковNo ratings yet
- Digitronik CPL Communication SDC40A/40G User's ManualDocument66 pagesDigitronik CPL Communication SDC40A/40G User's ManualnarkomanizcaNo ratings yet
- All 8251 8255 852Document124 pagesAll 8251 8255 852Sunil KumarNo ratings yet
- Embedded System Design - Unit - Ii - PPT - Part1Document20 pagesEmbedded System Design - Unit - Ii - PPT - Part1Bhuvana GowdaNo ratings yet
- 04 AVR ALU and SREG SetDocument12 pages04 AVR ALU and SREG SetDerbendeNo ratings yet
- Something About Some Electronic Components That You Will Never UseDocument47 pagesSomething About Some Electronic Components That You Will Never UseIosef Nee-MeNo ratings yet
- D 6 F 7 G 8 BunimDocument42 pagesD 6 F 7 G 8 BunimAyman Ihab Saad AwadNo ratings yet
- Static Pipelining #2 and Goodbye To Computer Architecture: Prof. Lawrence RauchwergerDocument22 pagesStatic Pipelining #2 and Goodbye To Computer Architecture: Prof. Lawrence RauchwergerDhirendra Pratap PandeyNo ratings yet
- ICS9LPRS355: 64-Pin CK505 W/fully Integrated Voltage Regulator + Integrated Series ResistorDocument28 pagesICS9LPRS355: 64-Pin CK505 W/fully Integrated Voltage Regulator + Integrated Series ResistorDavid J. Pinto ApazaNo ratings yet
- Training Msi MS-6Document18 pagesTraining Msi MS-6adaofisicoNo ratings yet
- PIC16F87XA: TABLE 8-5: Registers Associated With PWM and Timer2Document5 pagesPIC16F87XA: TABLE 8-5: Registers Associated With PWM and Timer2vitor valeNo ratings yet
- Mini MIPSDocument6 pagesMini MIPSKeith NissankaNo ratings yet
- Memory TrafficDocument45 pagesMemory TrafficSurya SunderNo ratings yet
- PIC16C773Document202 pagesPIC16C773Luis Oliveira SilvaNo ratings yet
- Basic Computer OrganizationTiming and Control UnitDocument12 pagesBasic Computer OrganizationTiming and Control UnitHARI HARAN REDDYNo ratings yet
- 08 - LCD For MicrocontrollerDocument18 pages08 - LCD For MicrocontrollerdiaazmrNo ratings yet
- Ms 6 ControllerDocument16 pagesMs 6 ControllerQuiteNo ratings yet
- PIC1Document183 pagesPIC1Gokul GocoolNo ratings yet
- Introduction and AVR ArchitectureDocument31 pagesIntroduction and AVR ArchitecturedaraNo ratings yet
- Programmable Flexpc LP/S Clock For Intel Based Systems: Features: Key FeaturesDocument21 pagesProgrammable Flexpc LP/S Clock For Intel Based Systems: Features: Key FeaturesMaikel Borges IglesiasNo ratings yet
- Attiny 13 Datasheet PDFDocument169 pagesAttiny 13 Datasheet PDFTed SunNo ratings yet
- Introduction and AVR ArchitectureDocument31 pagesIntroduction and AVR Architecturewilhelmus89No ratings yet
- Data Processing InstructionsDocument21 pagesData Processing InstructionsShin chan HindiNo ratings yet
- Wistron EIFFEL215I - KBLU 16557-1 PDFDocument105 pagesWistron EIFFEL215I - KBLU 16557-1 PDFEnder özveriNo ratings yet
- Building A Digital Light Meter With A Calibrated LDRDocument9 pagesBuilding A Digital Light Meter With A Calibrated LDRIsaac CohenNo ratings yet
- RTC MCP79410Document8 pagesRTC MCP79410hunter73100% (1)
- 8-Bit With 8K Bytes In-System Programmable Flash Atmega8A: FeaturesDocument19 pages8-Bit With 8K Bytes In-System Programmable Flash Atmega8A: Featuresnrt_malliNo ratings yet
- Lecture 2 - ARM Instruction SetDocument42 pagesLecture 2 - ARM Instruction SetSuhaib AbugderaNo ratings yet
- Programmable Flexpc Clock For P4 Processor: Features: DescriptionDocument24 pagesProgrammable Flexpc Clock For P4 Processor: Features: DescriptionMohdAshrofJusohNo ratings yet
- ASUS F3F Rev2.1 SchematicDocument89 pagesASUS F3F Rev2.1 SchematicAlexis AguilarNo ratings yet
- LPC 17xx ADC: Done byDocument13 pagesLPC 17xx ADC: Done byabu taherNo ratings yet
- 6.241 Dynamic Systems and Control: Lecture 16: Bode's Sensitivity Integral Readings: DDV, Chapter 18Document8 pages6.241 Dynamic Systems and Control: Lecture 16: Bode's Sensitivity Integral Readings: DDV, Chapter 18SOURAV SAHANo ratings yet
- HW5NNLS1 PDFDocument1 pageHW5NNLS1 PDFSOURAV SAHANo ratings yet
- Ep 2497610 A1 20120912 (En)Document1 pageEp 2497610 A1 20120912 (En)SOURAV SAHANo ratings yet
- Pmodkypd ™ Reference Manual: Revised April 8, 2016 This Manual Applies To The Pmodkypd Rev. BDocument2 pagesPmodkypd ™ Reference Manual: Revised April 8, 2016 This Manual Applies To The Pmodkypd Rev. BSOURAV SAHANo ratings yet
- Pmodkypd ™ Reference Manual: Revised April 8, 2016 This Manual Applies To The Pmodkypd Rev. BDocument2 pagesPmodkypd ™ Reference Manual: Revised April 8, 2016 This Manual Applies To The Pmodkypd Rev. BSOURAV SAHANo ratings yet
- Omnikey 3121Document2 pagesOmnikey 3121sanjajsinghNo ratings yet
- Chapter 1 General System DescriptionDocument26 pagesChapter 1 General System DescriptionEntropay UserNo ratings yet
- Pricelist Laptop PC 18 05 2020 Notebook City 2022 08 28T115049 156Document5 pagesPricelist Laptop PC 18 05 2020 Notebook City 2022 08 28T115049 156Siti SetiasihNo ratings yet
- TANCET MCA QpaperDocument8 pagesTANCET MCA QpaperdhineshkumarNo ratings yet
- Resume by Alarm Not Working - Z170X-UD5 With F4 BIOSDocument5 pagesResume by Alarm Not Working - Z170X-UD5 With F4 BIOSErebus Fobos Momus ErisNo ratings yet
- Data Is Raw Material Used As Input and Information Is Processed Data ObtainedDocument2 pagesData Is Raw Material Used As Input and Information Is Processed Data ObtainedHimanshuRanaNo ratings yet
- GenarationDocument4 pagesGenarationSumit Jadhav100% (1)
- WORKSTATIONSDocument7 pagesWORKSTATIONSSooraj AroraNo ratings yet
- Basic Structure of ComputersDocument39 pagesBasic Structure of Computersapi-3723664No ratings yet
- Canon Pixma Mx870 SMDocument66 pagesCanon Pixma Mx870 SMlospiderNo ratings yet
- 6450 Nasometer II K10M1108Document4 pages6450 Nasometer II K10M1108Dan GarcesNo ratings yet
- Desktop PC Intel Core I3 Intel® Core™ I3-6100T Processor (3.20 GHZ, 3M Cache)Document6 pagesDesktop PC Intel Core I3 Intel® Core™ I3-6100T Processor (3.20 GHZ, 3M Cache)Muhammad TaufiqNo ratings yet
- Network Interface CardDocument5 pagesNetwork Interface CardNhyat SeatNo ratings yet
- Cache Solved Examples PDFDocument3 pagesCache Solved Examples PDFHarshavardhan Virendra MallaNo ratings yet
- Price List Asus - MaretDocument60 pagesPrice List Asus - MaretComet ShopNo ratings yet
- Lenovo X1 Carbon - DS - 2018 - EN - v1Document3 pagesLenovo X1 Carbon - DS - 2018 - EN - v1Engkhalid AlghaziNo ratings yet
- Dell Precision T3500: Windows - Life Without Walls - Dell Recommends Windows 7Document3 pagesDell Precision T3500: Windows - Life Without Walls - Dell Recommends Windows 7starsky00008645No ratings yet
- Computer Systems Servicing - Module 2Document8 pagesComputer Systems Servicing - Module 2Bri ParalesNo ratings yet
- 10 Types of ComputersDocument3 pages10 Types of ComputersbingNo ratings yet
- W370SS EsmDocument112 pagesW370SS Esmdanielradu27No ratings yet
- Bizhub 4020 DataSheetDocument4 pagesBizhub 4020 DataSheetionutkokNo ratings yet
- Introduction To Computer Education: Advantages and DisadvantagesDocument17 pagesIntroduction To Computer Education: Advantages and DisadvantagesLamberto Pilatan Jr.No ratings yet
- Log 2030-04-02 00-06-23Document66 pagesLog 2030-04-02 00-06-23omar ابوطويلNo ratings yet
- EE233 Lect1 Syllabus PDFDocument9 pagesEE233 Lect1 Syllabus PDFKumail I كميلNo ratings yet
- NI PXIe-8101/8102Document4 pagesNI PXIe-8101/8102Solo NunooNo ratings yet
- HP240notebook Datasheet PDFDocument4 pagesHP240notebook Datasheet PDFrarecat2002No ratings yet
- CS305 Microprocessors and Microcontrollers CSE Syllabus Semesters - 5Document4 pagesCS305 Microprocessors and Microcontrollers CSE Syllabus Semesters - 5Sreejith KarunakaranpillaiNo ratings yet
- Operating Systems in PracticeDocument25 pagesOperating Systems in PracticeBigu Marius AlinNo ratings yet
- ACER 4793 4739Z QUANTA ZQH (Diagramas - Com.br)Document35 pagesACER 4793 4739Z QUANTA ZQH (Diagramas - Com.br)ljagomesNo ratings yet
- Interact With IT Book 1 AnswersDocument77 pagesInteract With IT Book 1 AnswerssivananbukayalvizhiNo ratings yet