You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 3 Ele Hex HatDocument5 pages3 Ele Hex Hatpy8eloNo ratings yet
- Philips TV 7607 Service ManualDocument257 pagesPhilips TV 7607 Service ManualPlayer NumberNo ratings yet
- N. v. Ramana - Power System Analysis-Pearson Education (2011)Document456 pagesN. v. Ramana - Power System Analysis-Pearson Education (2011)GOWTHAMAN K SNo ratings yet
- Schedule - Deep FreezersDocument10 pagesSchedule - Deep FreezersHamdiyya AbdullahiNo ratings yet
- DIACDocument6 pagesDIACgayu_gaya3No ratings yet
- IEEE Published Paper PICONDocument5 pagesIEEE Published Paper PICONamit vermaNo ratings yet
- Elektor (Nonlinear - Ir) 1976-04 - TextDocument54 pagesElektor (Nonlinear - Ir) 1976-04 - TextQuincheNo ratings yet
- 05-Fault Code List-WabcoDocument11 pages05-Fault Code List-WabcoRaul GTNo ratings yet
- RQ Series Battery Chargers User ManualDocument12 pagesRQ Series Battery Chargers User ManualaragornNo ratings yet
- Product Data Sheet: Acti 9 iID K - Residual Current Circuit Breaker - 2P - 25A - 30ma - Type ACDocument2 pagesProduct Data Sheet: Acti 9 iID K - Residual Current Circuit Breaker - 2P - 25A - 30ma - Type ACMariana Ribeiro GentaNo ratings yet
- Eee1001 Basic-Electrical-And-Electronics-Engineering Eth 1.0 37 Eee1001 PDFDocument2 pagesEee1001 Basic-Electrical-And-Electronics-Engineering Eth 1.0 37 Eee1001 PDFboomaNo ratings yet
- Ustares Research 2Document15 pagesUstares Research 2Zachary Yassir GonzalezNo ratings yet
- Ace-G226lh 306LH 456LHDocument53 pagesAce-G226lh 306LH 456LHAnonymous JcOZwo0OxNo ratings yet
- Mosfet PDFDocument13 pagesMosfet PDFTad-electronics TadelectronicsNo ratings yet
- Is The Doosan DS-8502LC High TG and Low CTE PCB Material Best For YouDocument4 pagesIs The Doosan DS-8502LC High TG and Low CTE PCB Material Best For YoujackNo ratings yet
- Radar Detection Using Ultrasonic Sensor: June 2020Document6 pagesRadar Detection Using Ultrasonic Sensor: June 2020yuqqi qiNo ratings yet
- A Fully Synthesized All-Digital VCO-Based Analog-to-Digital ConverterDocument4 pagesA Fully Synthesized All-Digital VCO-Based Analog-to-Digital Convertervinod kumar100% (1)
- Fast Fourier Transform ReportDocument19 pagesFast Fourier Transform ReportKarabo LetsholoNo ratings yet
- ECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXDocument11 pagesECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXXxx CccNo ratings yet
- Application of ABCDDocument15 pagesApplication of ABCDSantanu Nath50% (4)
- Exp 1,2Document4 pagesExp 1,2NischayNo ratings yet
- Manual - BIONET CardioCare 2000 OP Manual - by BA, 20051205Document97 pagesManual - BIONET CardioCare 2000 OP Manual - by BA, 20051205heniNo ratings yet
- As 1824.2Document8 pagesAs 1824.2AndrewcaesarNo ratings yet
- UL General-Use Circuit Ampacity Reference ChartDocument2 pagesUL General-Use Circuit Ampacity Reference ChartDaniel KretsuNo ratings yet
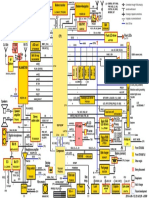
- Neo900 Block DiagramDocument1 pageNeo900 Block Diagramjornada660No ratings yet
- Lincoln Ranger 225Document6 pagesLincoln Ranger 225fdpc1987No ratings yet
- Pioneer General CatalogDocument14 pagesPioneer General CatalogLucian SanduNo ratings yet
- 0900P Electronic SensorsDocument33 pages0900P Electronic SensorseugenNo ratings yet
- New Conext XW Na: Inverter/chargerDocument2 pagesNew Conext XW Na: Inverter/chargerfoxNo ratings yet
- View APGENCO AE Exam Pattern For ExamDocument3 pagesView APGENCO AE Exam Pattern For ExamViswanath NtNo ratings yet