You might also like
- Butterworth Filter DesignDocument12 pagesButterworth Filter DesignVannyMeiSariNo ratings yet
- Low Pass and High Pass FiltersDocument52 pagesLow Pass and High Pass Filtersak21193No ratings yet
- Plucked String Models FromtheKarplus StrongAlgorithmtoDigitalWG&BeyondDocument15 pagesPlucked String Models FromtheKarplus StrongAlgorithmtoDigitalWG&BeyondboboNo ratings yet
- advancedDSP 1Document88 pagesadvancedDSP 1Dr-Raghad Al-FahamNo ratings yet
- Digital Filters in VHDL LabDocument5 pagesDigital Filters in VHDL LabAli AhmadNo ratings yet
- Equalization MotionDocument10 pagesEqualization MotionMahmud JaafarNo ratings yet
- Digital Signal Synthesis DDS - Tutorial - Rev12!2!99Document122 pagesDigital Signal Synthesis DDS - Tutorial - Rev12!2!99Lixo4618No ratings yet
- Qam Using Labview SimulationDocument9 pagesQam Using Labview SimulationMichellePérezNo ratings yet
- % BPSKDocument10 pages% BPSKMajd ShakhatrehNo ratings yet
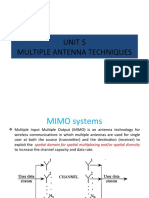
- Unit 5Document47 pagesUnit 5menakadevieceNo ratings yet
- Pilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsDocument6 pagesPilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsQuả Ớt Leo-neeNo ratings yet
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDocument8 pagesJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- DWC-USRP - LectureNotes PDFDocument84 pagesDWC-USRP - LectureNotes PDFJesús Mendoza PadillaNo ratings yet
- Assignment Rough WorkDocument7 pagesAssignment Rough Workmunna_mantra896919No ratings yet
- To Design and Implement An IIR Filter For Given SpecificationsDocument9 pagesTo Design and Implement An IIR Filter For Given Specifications4NM19EC157 SHARANYA R SHETTYNo ratings yet
- Performance of Channel Estimation in OFDM System For Different PSK ModulationsDocument6 pagesPerformance of Channel Estimation in OFDM System For Different PSK ModulationsliiNo ratings yet
- OFDM With Different ModulationDocument2 pagesOFDM With Different ModulationAmanuel TadeleNo ratings yet
- Chapter-1: 1.1. Wireless Communication SystemsDocument28 pagesChapter-1: 1.1. Wireless Communication Systemskarthick_mariner92No ratings yet
- Probability AssignmentDocument10 pagesProbability Assignmentrabya waheedNo ratings yet
- 1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsDocument15 pages1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsRajib MukherjeeNo ratings yet
- Computer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumDocument39 pagesComputer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumRaju ImandiNo ratings yet
- Channel Estimation Algorithms For OFDM SystemsDocument5 pagesChannel Estimation Algorithms For OFDM Systemsdearprasanta6015No ratings yet
- Zeroscillator OPMAN7Document7 pagesZeroscillator OPMAN7David WurthNo ratings yet
- Modulation: Farrukh JavedDocument26 pagesModulation: Farrukh JavedChaudhary FarrukhNo ratings yet
- IIR Digital Filtyttyer Structures Filter DesignDocument35 pagesIIR Digital Filtyttyer Structures Filter DesignSiddarth MadanNo ratings yet
- Filter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesDocument17 pagesFilter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesAnonymous pS4LT2GJUSNo ratings yet
- Channel Estimation ModelingDocument15 pagesChannel Estimation ModelingJohn TranNo ratings yet
- Field Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterDocument4 pagesField Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Filters Active Passive N Switched CapacitorDocument24 pagesFilters Active Passive N Switched Capacitorgotti45No ratings yet
- Ca4 - Designing and Implementing FiltersDocument9 pagesCa4 - Designing and Implementing Filtersapi-223721455No ratings yet
- Common Phase Error Estimation and Suppression in OFDMDocument5 pagesCommon Phase Error Estimation and Suppression in OFDMemadhusNo ratings yet
- A Low Complexity Channel Estimation Algorithm For Massive MIMO SystemDocument12 pagesA Low Complexity Channel Estimation Algorithm For Massive MIMO SystemilbahiNo ratings yet
- Performance Analysis of V-Blast Based MIMO-OFDM System With Various Detection TechniquesDocument4 pagesPerformance Analysis of V-Blast Based MIMO-OFDM System With Various Detection Techniqueszizo1921No ratings yet
- Baseband M-Ary Pam TransmissionDocument21 pagesBaseband M-Ary Pam TransmissionAnonymous uspYoqE100% (1)
- Cornell MDocument48 pagesCornell Mapi-633277434No ratings yet
- Fading SimulationDocument45 pagesFading SimulationAtef Al-Kotafi Al-AbdiNo ratings yet
- ICI CANCELLATION TECHNIQUES FOR OFDM SYSTEMSDocument6 pagesICI CANCELLATION TECHNIQUES FOR OFDM SYSTEMSjavicho2006No ratings yet
- The Valve Wizard - Tremolo OscillatorDocument3 pagesThe Valve Wizard - Tremolo Oscillatormorag142No ratings yet
- IIR Filter Design With MATLABDocument28 pagesIIR Filter Design With MATLABdivya1587No ratings yet
- Multi-Channel Speech EnhancementDocument35 pagesMulti-Channel Speech EnhancementAdit Mbeyes Cah GetasNo ratings yet
- Simplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationDocument5 pagesSimplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationInternational Organization of Scientific Research (IOSR)No ratings yet
- A Conceptual Study of OFDM-based Multiple Access SchemesDocument7 pagesA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdNo ratings yet
- QAM Overview and TestingDocument67 pagesQAM Overview and TestingJamal HagiNo ratings yet
- DC 5 Receiver NewDocument228 pagesDC 5 Receiver NewersimohitNo ratings yet
- CM Kaltfl 080709Document5 pagesCM Kaltfl 080709Võ Quy QuangNo ratings yet
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDocument22 pagesA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupNo ratings yet
- Simulation ModelDocument21 pagesSimulation Modelashuluck2007No ratings yet
- BER For BPSK in OFDM With Rayleigh Multipath ChannelDocument6 pagesBER For BPSK in OFDM With Rayleigh Multipath ChannelNaveen Kumar ChadalavadaNo ratings yet
- Emed ES350 ESU - Service ManualDocument112 pagesEmed ES350 ESU - Service ManualEDITOR100% (1)
- A Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystemDocument6 pagesA Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystempreetiNo ratings yet
- Development of FiltersDocument15 pagesDevelopment of FiltersWilson Chan0% (1)
- SIMULATION OF DIGITAL MODULATION TECHNIQUESDocument19 pagesSIMULATION OF DIGITAL MODULATION TECHNIQUESThahsin ThahirNo ratings yet
- 08.508 DSP Lab Expt No 6 HandoutDocument7 pages08.508 DSP Lab Expt No 6 HandoutAssini HussainNo ratings yet
- Unit II Radio ReceiversDocument29 pagesUnit II Radio ReceiversecekluNo ratings yet
- High Order Programmable and Tunable Analog Filter ICDocument16 pagesHigh Order Programmable and Tunable Analog Filter ICRahil JainNo ratings yet
- Digital Signal Processing Assignment SolutionsDocument9 pagesDigital Signal Processing Assignment SolutionsPhan Anh HungNo ratings yet
- Low Pass Filter Frequency ResponseDocument12 pagesLow Pass Filter Frequency ResponseM Azeem100% (1)
- Active Low Pass Filter Design and ApplicationsDocument48 pagesActive Low Pass Filter Design and ApplicationsTeheranNo ratings yet
- Analog Electronic Circuits (ECE 201)Document3 pagesAnalog Electronic Circuits (ECE 201)Ankith Jai KrishnaNo ratings yet
- Updated RFD Lab Manual PDFDocument46 pagesUpdated RFD Lab Manual PDFAminaMouhoucheNo ratings yet
- FALLSEM2018-19 ECE3027 ETH TT308 VL2018191003186 Reference Material I Module I - FiltersDocument16 pagesFALLSEM2018-19 ECE3027 ETH TT308 VL2018191003186 Reference Material I Module I - FiltersPrasadNo ratings yet
- Lab 5Document5 pagesLab 5Katiuvelis Diaz RodriguezNo ratings yet
- EE Cep 2019Document3 pagesEE Cep 2019Mujtaba FarrukhNo ratings yet
- Power Electronics: Lab ManualDocument6 pagesPower Electronics: Lab ManualMujtaba FarrukhNo ratings yet
- LM317 Three Terminal Voltage Regulator LabDocument2 pagesLM317 Three Terminal Voltage Regulator LabMujtaba FarrukhNo ratings yet
- PLODocument6 pagesPLOMujtaba FarrukhNo ratings yet
- Lab 1a Performance of A Half Wave and Single Bridge RectifierDocument6 pagesLab 1a Performance of A Half Wave and Single Bridge RectifierMujtaba FarrukhNo ratings yet
- Power Electronics: Department of Elecrical EngineeringDocument1 pagePower Electronics: Department of Elecrical EngineeringMujtaba FarrukhNo ratings yet
- Mapping of CLOs With PLOsDocument2 pagesMapping of CLOs With PLOsMujtaba FarrukhNo ratings yet
- Final Year Project Handbook (Session 2016)Document52 pagesFinal Year Project Handbook (Session 2016)Mujtaba FarrukhNo ratings yet
- Lab 1a Performance of A Half Wave and Single Bridge RectifierDocument6 pagesLab 1a Performance of A Half Wave and Single Bridge RectifierMujtaba FarrukhNo ratings yet
- Engro Internship Application FormDocument4 pagesEngro Internship Application FormMujtaba FarrukhNo ratings yet
- Mapping of CLOs With PLOsDocument2 pagesMapping of CLOs With PLOsMujtaba FarrukhNo ratings yet
- Power System Analysis and DesignDocument2 pagesPower System Analysis and DesignMujtaba FarrukhNo ratings yet
- Building A Digital Light Meter With A Calibrated LDRDocument9 pagesBuilding A Digital Light Meter With A Calibrated LDRIsaac CohenNo ratings yet
- Digital CIC Filter Design for Audio Sigma-Delta ADCDocument4 pagesDigital CIC Filter Design for Audio Sigma-Delta ADCOtavio Elias Viana de FreitasNo ratings yet
- Describing Function analysis of nonlinear systems – Prof Elio USAIDocument84 pagesDescribing Function analysis of nonlinear systems – Prof Elio USAIAnirban GhoseNo ratings yet
- EE 341 Lab 4Document8 pagesEE 341 Lab 4EmilyNo ratings yet
- Sebastian Hoyos: ELEN 689:special Topics Advanced Mixed-Signal InterfacesDocument59 pagesSebastian Hoyos: ELEN 689:special Topics Advanced Mixed-Signal InterfacesBinod AdhikariNo ratings yet
- HibapapierDocument12 pagesHibapapierujjainbNo ratings yet
- Medical Signal Processing (BM321) Report 1: Configuration of A DSP System Homework 1Document15 pagesMedical Signal Processing (BM321) Report 1: Configuration of A DSP System Homework 1Batool HerzallahNo ratings yet
- M11S User ManualDocument75 pagesM11S User Manualhenrik.dunerNo ratings yet
- Signals and Systems: Chapter SS-4 The Continuous-Time Fourier TransformDocument84 pagesSignals and Systems: Chapter SS-4 The Continuous-Time Fourier TransformbetocheNo ratings yet
- PART 4-Elec Buk (Final)Document18 pagesPART 4-Elec Buk (Final)Mizhar Layosa GerardoNo ratings yet
- UNIT-III Signal TXN THR Linear SystemsDocument80 pagesUNIT-III Signal TXN THR Linear SystemsVignan VarmaNo ratings yet
- Image Processing: Gaurav GuptaDocument38 pagesImage Processing: Gaurav GuptaanithaNo ratings yet
- Online Final Exam for Digital Signal ProcessingDocument9 pagesOnline Final Exam for Digital Signal ProcessingSalman YusufNo ratings yet
- 132A 1 PDCnotesDocument251 pages132A 1 PDCnotesNick CirilloNo ratings yet
- Digital Image Processing TutorialDocument2 pagesDigital Image Processing TutorialThamarai SelviNo ratings yet
- TUT Electromedical SignalsDocument2 pagesTUT Electromedical SignalsSandeepNo ratings yet
- Design Project 2016 DSP ReleaseDocument2 pagesDesign Project 2016 DSP ReleaseSinh TốNo ratings yet
- Design Methodology For Graphene Tunable Filters at The Sub-Millimeter-Wave FrequenciesDocument18 pagesDesign Methodology For Graphene Tunable Filters at The Sub-Millimeter-Wave FrequencieszahraNo ratings yet
- ECE Interview QuestionsDocument2 pagesECE Interview QuestionsJoshua Dusari100% (1)
- Review of Loudspeaker EqualizationDocument4 pagesReview of Loudspeaker EqualizationIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Course Outline MCTE 2311 Signal and System AnalysisDocument6 pagesCourse Outline MCTE 2311 Signal and System AnalysisnewasamNo ratings yet
- Laboratory Manual: Analogue and Digital Communication LabDocument9 pagesLaboratory Manual: Analogue and Digital Communication LabZain HaiderNo ratings yet
- M.tech (Electronics & Inst. Engg.)Document35 pagesM.tech (Electronics & Inst. Engg.)rajesh_burra_200% (1)
- Safety-Related, Applicable Up To SIL 3 According To IEC 61508Document8 pagesSafety-Related, Applicable Up To SIL 3 According To IEC 61508Abdeldjalil AchourNo ratings yet
- Advanced Coupling Matrix Synthesis Technique For UW FiltersDocument10 pagesAdvanced Coupling Matrix Synthesis Technique For UW FiltersFlorin CalinescuNo ratings yet
- Chapter 7Document25 pagesChapter 7chalaNo ratings yet
- LICADocument2 pagesLICAmunnap15No ratings yet