You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
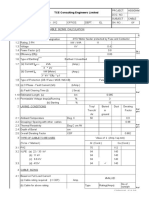
- Cable Sizing CalculationDocument72 pagesCable Sizing CalculationHARI my songs100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- V1 N2 1980 RabenhorstDocument6 pagesV1 N2 1980 Rabenhorstraa2010No ratings yet
- 1982 International Rectifier Hexfet Databook PDFDocument472 pages1982 International Rectifier Hexfet Databook PDFetmatsudaNo ratings yet
- Pre Calculus MIdTermsDocument5 pagesPre Calculus MIdTermsLamette Austria Ayong0% (1)
- GB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsDocument14 pagesGB-T 5137.1-2002 Test Methods of Safety Glazing Materials Used On Road Vehicles Part1 Mechanical Properties TestsRandyzhuNo ratings yet
- Ismail Marzuki mp3Document1 pageIsmail Marzuki mp3Anonymous R0s0Nd6yNo ratings yet
- Perbandingan Asus Fx553vd-Dm001d - 11jt Vs Asus Rog Gl553vd-Fy280d - 13.1jt Vs Msi Gl62m 7rex 14.4jtDocument3 pagesPerbandingan Asus Fx553vd-Dm001d - 11jt Vs Asus Rog Gl553vd-Fy280d - 13.1jt Vs Msi Gl62m 7rex 14.4jtAnonymous R0s0Nd6yNo ratings yet
- Ismail Marzuki mp3Document1 pageIsmail Marzuki mp3Anonymous R0s0Nd6yNo ratings yet
- Vendormeetjvrchp - Coal Handling Plant (10mtpa Capacity) On Epc ProjectDocument45 pagesVendormeetjvrchp - Coal Handling Plant (10mtpa Capacity) On Epc ProjectAnonymous R0s0Nd6yNo ratings yet
- Terms & Conditions (Vol-1)Document36 pagesTerms & Conditions (Vol-1)Anonymous R0s0Nd6yNo ratings yet
- Price Schedule (Vol-3)Document3 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- Price Schedule (Vol-3)Document6 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- Price Schedule (Vol-3)Document5 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- Lab Manual of Hydraulics PDFDocument40 pagesLab Manual of Hydraulics PDFJULIUS CESAR G. CADAONo ratings yet
- Rexx Programmers ReferenceDocument723 pagesRexx Programmers ReferenceAnonymous ET7GttT7No ratings yet
- Zbrush 4 ShortcutsDocument3 pagesZbrush 4 ShortcutsJNo ratings yet
- Study of Padmanabhapuram Palace TrivandrumDocument14 pagesStudy of Padmanabhapuram Palace Trivandrumcrustybubbles100% (2)
- Air Conditioner: Owner'S ManualDocument80 pagesAir Conditioner: Owner'S Manualfred MaxNo ratings yet
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDocument5 pagesAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574No ratings yet
- InfoDocument18 pagesInfoKaran Verm'aNo ratings yet
- The Kemetic Tree of LifeDocument1 pageThe Kemetic Tree of LifeFlorin CiudinNo ratings yet
- PLX7100A Digital Mobile C-Arm X-Ray Machine: 1. Technical SpecificationDocument3 pagesPLX7100A Digital Mobile C-Arm X-Ray Machine: 1. Technical SpecificationAbdalhakeem AlturkyNo ratings yet
- Downloadble Science NotesDocument55 pagesDownloadble Science NotesJeb PampliegaNo ratings yet
- Gas Turbine Compressor WashingDocument8 pagesGas Turbine Compressor Washingwolf_ns100% (1)
- Calculation Eurocode 2Document4 pagesCalculation Eurocode 2rammirisNo ratings yet
- List of Books s8 ElectiveDocument2 pagesList of Books s8 ElectivemaniNo ratings yet
- C V RamanDocument8 pagesC V RamanJayesh KomalwarNo ratings yet
- 新型重油催化裂化催化剂RCC 1的研究开发Document5 pages新型重油催化裂化催化剂RCC 1的研究开发Anca DumitruNo ratings yet
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Document28 pagesCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaNo ratings yet
- Task 4 Finite Element MethodDocument7 pagesTask 4 Finite Element MethodMohd Azizee Bin SukorNo ratings yet
- Cat Hammers C842898Document8 pagesCat Hammers C842898maggioraNo ratings yet
- Switching Power Supply DesignDocument21 pagesSwitching Power Supply DesignSamuel mutindaNo ratings yet
- API ISCAN-LITE ScannerDocument4 pagesAPI ISCAN-LITE Scannergrg_greNo ratings yet
- Italy CasestudyDocument21 pagesItaly CasestudylozaNo ratings yet
- Bruh I Hate File Handling - CPPDocument3 pagesBruh I Hate File Handling - CPPJayson AmodiaNo ratings yet
- Comparative Study of Steel Structure With and Without Floating Columns in EtabsDocument13 pagesComparative Study of Steel Structure With and Without Floating Columns in EtabsBehroz BehzadNo ratings yet
- Spesiikasi PerallatanDocument10 pagesSpesiikasi PerallatanRafi RaziqNo ratings yet
- Customer DemandDocument42 pagesCustomer Demandtulika_ajwaniNo ratings yet