You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Unit Outline - SCA1116 Aviation Legislation and Regulatory FrameworksDocument5 pagesUnit Outline - SCA1116 Aviation Legislation and Regulatory FrameworksrajimuruganNo ratings yet
- Bearing Capacity of Foundations On Soft Clays With Granular Column and TrenchDocument8 pagesBearing Capacity of Foundations On Soft Clays With Granular Column and TrenchrajimuruganNo ratings yet
- A Practical Approach To Assess Risk in Aviation Domains For Safety Management SystemsDocument19 pagesA Practical Approach To Assess Risk in Aviation Domains For Safety Management SystemsrajimuruganNo ratings yet
- India & ILO - Ministry of Labour & Employment - Government of IndiaDocument1 pageIndia & ILO - Ministry of Labour & Employment - Government of IndiarajimuruganNo ratings yet
- E9405 IranArze PDFDocument27 pagesE9405 IranArze PDFrajimuruganNo ratings yet
- Experimental Study On Reuse of Recycled Concrete Aggregates For Load Bearing Components of Building StructuresDocument11 pagesExperimental Study On Reuse of Recycled Concrete Aggregates For Load Bearing Components of Building StructuresrajimuruganNo ratings yet
- College of Engineering and Technology (Autonomous)Document3 pagesCollege of Engineering and Technology (Autonomous)rajimuruganNo ratings yet
- Journal of Rock Mechanics and Geotechnical Engineering: Adam Hamrouni, Badreddine Sbartai, Daniel DiasDocument8 pagesJournal of Rock Mechanics and Geotechnical Engineering: Adam Hamrouni, Badreddine Sbartai, Daniel Diasrajimurugan100% (1)
- Hidden Hypotheses in Hypothesis-Free' Genome-Wide Epigenetic AssociationsDocument5 pagesHidden Hypotheses in Hypothesis-Free' Genome-Wide Epigenetic AssociationsrajimuruganNo ratings yet
- Personality and Individual Di FferencesDocument8 pagesPersonality and Individual Di FferencesrajimuruganNo ratings yet
- E9405 IranArzeDocument27 pagesE9405 IranArzerajimuruganNo ratings yet
- E9406 IranArzeDocument16 pagesE9406 IranArzerajimuruganNo ratings yet
- Tourism Management: Villy Abraham, Yaniv Poria TDocument3 pagesTourism Management: Villy Abraham, Yaniv Poria TrajimuruganNo ratings yet
- E9419 IranArzeDocument68 pagesE9419 IranArzerajimuruganNo ratings yet
- MN000301R171Document24 pagesMN000301R171juancgr77No ratings yet
- TemperatureDocument38 pagesTemperatureSankar KNo ratings yet
- Bid Document: Bidyut Niyamak Bhawan, Unit - VIII, Bhubaneswar - 751 012Document40 pagesBid Document: Bidyut Niyamak Bhawan, Unit - VIII, Bhubaneswar - 751 012rajimuruganNo ratings yet
- Energies 12 04161Document17 pagesEnergies 12 04161rajimuruganNo ratings yet
- Transmission Code - 12 Oct 2017 FinalDocument100 pagesTransmission Code - 12 Oct 2017 FinalabdulNo ratings yet
- Induced Sheath Voltages in 110 KV Power Cables - Case StudyDocument10 pagesInduced Sheath Voltages in 110 KV Power Cables - Case StudyrajimuruganNo ratings yet
- L-07 (SS) (Ia&c) ( (Ee) Nptel)Document15 pagesL-07 (SS) (Ia&c) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Flow PDFDocument41 pagesFlow PDFTonyNo ratings yet
- Level Measurement N.asyddinDocument50 pagesLevel Measurement N.asyddin채원종No ratings yet
- FlowDocument105 pagesFlowretheepNo ratings yet
- Risk Topic Instrument Calibration ZurichDocument6 pagesRisk Topic Instrument Calibration ZurichKj_bdNo ratings yet
- Pressure Measurement: by N. AsyiddinDocument29 pagesPressure Measurement: by N. AsyiddinrajimuruganNo ratings yet
- Instrument TransformersDocument10 pagesInstrument TransformersLeonardo MarcelinoNo ratings yet
- Abb 422 Wpo AbbflowhandbookDocument290 pagesAbb 422 Wpo AbbflowhandbookCarlos PintoNo ratings yet
- Measurement and Calibration Systems: Hellenic Accreditation System S.ADocument21 pagesMeasurement and Calibration Systems: Hellenic Accreditation System S.ArajimuruganNo ratings yet
- Connections of Overcurrent PDFDocument16 pagesConnections of Overcurrent PDFrajimuruganNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- DW-143 - Leakage Factor As Per Calculation FormulaDocument2 pagesDW-143 - Leakage Factor As Per Calculation Formulasandeep7426No ratings yet
- Seafrost BD50F Refrigerator SystemDocument7 pagesSeafrost BD50F Refrigerator SystemMathiyazhagan SNo ratings yet
- Pipe Color CodeDocument1 pagePipe Color CodePatricia de los SantosNo ratings yet
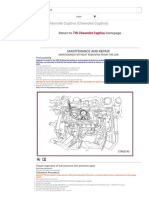
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Document57 pagesChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- MRT PrjectDocument59 pagesMRT PrjectFahrul 2394No ratings yet
- MR ValvesDocument56 pagesMR ValvesIdris SiddiquiNo ratings yet
- Pravin Yesubon.Y: and Social Responsibility (PSSR) and Personal Survival Techniques (PST)Document2 pagesPravin Yesubon.Y: and Social Responsibility (PSSR) and Personal Survival Techniques (PST)shaNo ratings yet
- NEOCLASSICAL CITY PlanningDocument10 pagesNEOCLASSICAL CITY PlanningAfrahNo ratings yet
- Amadeus Web ServicesDocument2 pagesAmadeus Web ServicesBoris ChoiNo ratings yet
- Medium Voltage MZDocument86 pagesMedium Voltage MZsujiNo ratings yet
- Cryogenics Handbook PDFDocument227 pagesCryogenics Handbook PDFmangyanNo ratings yet
- Watergems - How To Design A Water Distribution SystemDocument3 pagesWatergems - How To Design A Water Distribution SystemhiyogsNo ratings yet
- Cramkshaft Main Bearimg InstallDocument5 pagesCramkshaft Main Bearimg InstallNimNo ratings yet
- Concrete Mix Design 10Document1 pageConcrete Mix Design 10Rexter UnabiaNo ratings yet
- UntitledDocument107 pagesUntitledniko_seppanenNo ratings yet
- Data SheetDocument5 pagesData Sheetsongtu2552No ratings yet
- Operating Instructions: MCA 122 Modbus TCPDocument46 pagesOperating Instructions: MCA 122 Modbus TCPnefertiti551No ratings yet
- Check ListDocument6 pagesCheck ListosersNo ratings yet
- IoT - Building Blocks, Applications and ChallengesDocument60 pagesIoT - Building Blocks, Applications and ChallengesRamanamurthy Saripalli0% (1)
- A35 Ostetricia Ginecologia PDFDocument8 pagesA35 Ostetricia Ginecologia PDFAarthiNo ratings yet
- Riso Rp310 Panel MessagesDocument44 pagesRiso Rp310 Panel MessagesKhin Zaw50% (2)
- Repair Kit Hitachi PlasmaDocument4 pagesRepair Kit Hitachi Plasmacolman123456789100% (1)
- Eee25 2018syllabusDocument4 pagesEee25 2018syllabusEmman Joshua BustoNo ratings yet
- Nupack User Guide 3.2Document44 pagesNupack User Guide 3.2Dicastelgandolfo VchNo ratings yet
- Corrosion of Stainless SteelsDocument5 pagesCorrosion of Stainless Steelsparasite0167% (3)
- Depth of InvestigationDocument8 pagesDepth of InvestigationGogot Pantja ParijogoNo ratings yet
- Magnetic Separation PDFDocument12 pagesMagnetic Separation PDFmitzoskyNo ratings yet
- 2013 OSPE Salary Survey PDFDocument20 pages2013 OSPE Salary Survey PDFdarinscottjohnsonNo ratings yet
- A Study of Chemical Structure of Soft and Hardwood andDocument7 pagesA Study of Chemical Structure of Soft and Hardwood andBruna BarraNo ratings yet
- Croatia: Approved Port Facilities in CroatiaDocument1 pageCroatia: Approved Port Facilities in CroatiaАлександрNo ratings yet