You might also like
- Fmem - Unit VDocument57 pagesFmem - Unit VBodhi SealNo ratings yet
- CAE and CAM Research Report SummaryDocument12 pagesCAE and CAM Research Report Summaryshaharyar ahmedNo ratings yet
- MechatronicsDocument264 pagesMechatronicschandra shekharNo ratings yet
- Automating ANSYS for FEA ModelingDocument8 pagesAutomating ANSYS for FEA ModelingHarris DanielNo ratings yet
- NI Mechatronics Machine Design GuideDocument46 pagesNI Mechatronics Machine Design GuideGautam TyagiNo ratings yet
- A Training Report On Automation: Completed at Sofcon PVT LTD, Ahemdabad'Document36 pagesA Training Report On Automation: Completed at Sofcon PVT LTD, Ahemdabad'Hemal PatelNo ratings yet
- Template-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanDocument10 pagesTemplate-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanmurgadeepNo ratings yet
- Unit-5 MechatronicsDocument34 pagesUnit-5 Mechatronicsrudrav3210No ratings yet
- Introduction to Computer Numerical Control (CNCDocument50 pagesIntroduction to Computer Numerical Control (CNCtaridanNo ratings yet
- SeminarDocument23 pagesSeminarAchu KuttyNo ratings yet
- Research Paper On CNC Machine PDFDocument7 pagesResearch Paper On CNC Machine PDFqdvtairif100% (1)
- Computer Aided ManufacturingDocument19 pagesComputer Aided Manufacturingosmund147No ratings yet
- Synopsis Stamping Mechine1Document12 pagesSynopsis Stamping Mechine1Nayan JainNo ratings yet
- Chapter 1Document12 pagesChapter 1venus daguinotasNo ratings yet
- Automated Timetable Machine LearningDocument5 pagesAutomated Timetable Machine Learningmehari kirosNo ratings yet
- Android GameDocument27 pagesAndroid GameAnuj TripathiNo ratings yet
- Assignments Subject Code: MB0028 (3 Credits) Set 1 Marks 60 Subject Name: Production & Operations ManagementDocument24 pagesAssignments Subject Code: MB0028 (3 Credits) Set 1 Marks 60 Subject Name: Production & Operations ManagementnormanroxdelNo ratings yet
- CNC RoboticsDocument17 pagesCNC RoboticsKunal DuttNo ratings yet
- Unit - 7: CNC Machining Centers: Numerical ControlDocument56 pagesUnit - 7: CNC Machining Centers: Numerical ControlnenadNo ratings yet
- Computer Aided Design: 8/8/2014 10:37 AM Electrical Machine Design M.V.Ramana RaoDocument54 pagesComputer Aided Design: 8/8/2014 10:37 AM Electrical Machine Design M.V.Ramana RaokosmitoNo ratings yet
- Mechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC MachinesDocument105 pagesMechatronics Lab Manual Module 1: Introduction to Mechatronics and CNC Machineskbmn2No ratings yet
- Automatic Work Piece Inspection Cum Counter ConveyorDocument10 pagesAutomatic Work Piece Inspection Cum Counter ConveyorIJRASETPublicationsNo ratings yet
- Proceedings of Symposium in Production and Quality Engineering Kasetsart University, 4-5 June 2002, pp.104-111Document8 pagesProceedings of Symposium in Production and Quality Engineering Kasetsart University, 4-5 June 2002, pp.104-111csrajmohan2924No ratings yet
- Automation in Manufacturing: Learning Control and Condition MonitoringDocument9 pagesAutomation in Manufacturing: Learning Control and Condition MonitoringParesh BobdeNo ratings yet
- A Review On Automation of IndustriesDocument4 pagesA Review On Automation of IndustriesSarvesh DesaiNo ratings yet
- The Applications of Chemical Engineering Simulation SoftwareDocument9 pagesThe Applications of Chemical Engineering Simulation Softwarekatya ammanuelNo ratings yet
- Automation in Manufacturing: February 1997Document9 pagesAutomation in Manufacturing: February 1997anujNo ratings yet
- Onilne RestaurantDocument108 pagesOnilne RestaurantIndar GuptaNo ratings yet
- System Management OverviewDocument67 pagesSystem Management OverviewMukul SharmaNo ratings yet
- Unit7-CNC Machining CentresDocument56 pagesUnit7-CNC Machining Centresvasudevanrv9405No ratings yet
- A Review On Automation of IndustriesDocument4 pagesA Review On Automation of IndustriesHarsh ChoudharyNo ratings yet
- Project1 ReportDocument31 pagesProject1 ReportAshis MohantyNo ratings yet
- Quiz Management System: Submitted For Partial Fulfillment of The Degree ofDocument108 pagesQuiz Management System: Submitted For Partial Fulfillment of The Degree ofBharat ChaudharyNo ratings yet
- Hybrid Approach For Predictive Maintenance Using Digital TwinDocument7 pagesHybrid Approach For Predictive Maintenance Using Digital TwinSheron SisodiyaNo ratings yet
- Online Examination System: A Project Report OnDocument49 pagesOnline Examination System: A Project Report OnFarahNo ratings yet
- Analyzing Existing Systems and Designing Cellular AutomataDocument7 pagesAnalyzing Existing Systems and Designing Cellular AutomataOwolabi PetersNo ratings yet
- MANUSCRIPTDocument26 pagesMANUSCRIPTCon D RianoNo ratings yet
- SPM Experiment 9: Activity Network DiagramDocument8 pagesSPM Experiment 9: Activity Network DiagramMan UtdNo ratings yet
- Automated Timetable Generator Project ProposalDocument10 pagesAutomated Timetable Generator Project ProposalRizwan WaheedNo ratings yet
- Indala College of EngineeringDocument5 pagesIndala College of EngineeringParag YadavNo ratings yet
- Ebroand Seya-1Document19 pagesEbroand Seya-1wabdushukurNo ratings yet
- ATM Simulator SynopsisDocument12 pagesATM Simulator SynopsisVatsal Pathak100% (2)
- Aditya'sDocument5 pagesAditya'saditya060848No ratings yet
- National Institute of Technology Calicut: Signature Verification Project ReportDocument39 pagesNational Institute of Technology Calicut: Signature Verification Project ReportTohko AmanoNo ratings yet
- Unit7 Nan PDFDocument56 pagesUnit7 Nan PDFkdtkopNo ratings yet
- Mod1 Mechatronics and Manufacturing Automation PDFDocument17 pagesMod1 Mechatronics and Manufacturing Automation PDFthebetterman0511No ratings yet
- CNC ThesisDocument4 pagesCNC Thesisbkxk6fzf100% (2)
- 101 Ijmperdjun2019101Document8 pages101 Ijmperdjun2019101TJPRC PublicationsNo ratings yet
- Mechatronics and Manufacturing Automation: NPTEL Phase 2Document17 pagesMechatronics and Manufacturing Automation: NPTEL Phase 2Prateek PandeyNo ratings yet
- Aircom System®: Airline Ticketing and Reservation SystemDocument21 pagesAircom System®: Airline Ticketing and Reservation Systemmaclean_kumiNo ratings yet
- Automatic Sorting MachineDocument5 pagesAutomatic Sorting MachineJournal 4 ResearchNo ratings yet
- Mechatronics in Manufacturing with OOPDocument8 pagesMechatronics in Manufacturing with OOPdfssdfNo ratings yet
- Computer ProjectDocument24 pagesComputer ProjectnagpalanishNo ratings yet
- Python Machine Learning: Machine Learning Algorithms for Beginners - Data Management and Analytics for Approaching Deep Learning and Neural Networks from ScratchFrom EverandPython Machine Learning: Machine Learning Algorithms for Beginners - Data Management and Analytics for Approaching Deep Learning and Neural Networks from ScratchNo ratings yet
- Design Automation of Cyber-Physical SystemsFrom EverandDesign Automation of Cyber-Physical SystemsMohammad Abdullah Al FaruqueNo ratings yet
- Up and Running with Autodesk Inventor Simulation 2011: A Step-by-Step Guide to Engineering Design SolutionsFrom EverandUp and Running with Autodesk Inventor Simulation 2011: A Step-by-Step Guide to Engineering Design SolutionsNo ratings yet
- Model-Based Engineering for Complex Electronic SystemsFrom EverandModel-Based Engineering for Complex Electronic SystemsRating: 5 out of 5 stars5/5 (1)
- Digital Control Engineering: Analysis and DesignFrom EverandDigital Control Engineering: Analysis and DesignRating: 3 out of 5 stars3/5 (1)
- SQL Server ReplicationDocument4 pagesSQL Server ReplicationrajakumariNo ratings yet
- Erp Methodology PDFDocument2 pagesErp Methodology PDFBiancaNo ratings yet
- Enq TX - Index ContentionDocument4 pagesEnq TX - Index ContentiondayanandsagarNo ratings yet
- Multiple Response Optimization PDFDocument54 pagesMultiple Response Optimization PDFNinong ElmalNo ratings yet
- Digital MarketingDocument289 pagesDigital MarketingNeha Shaikh50% (2)
- Artificial IntelligenceDocument14 pagesArtificial IntelligenceManohara Reddy PittuNo ratings yet
- Appendix ADocument570 pagesAppendix ABalaNo ratings yet
- E-Commerce Security and Legal IssuesDocument5 pagesE-Commerce Security and Legal IssuesPrasunPariharNo ratings yet
- Scrum Master NotesDocument20 pagesScrum Master NotesHerbert Weigelt67% (3)
- Hart Communication ProtocolDocument12 pagesHart Communication ProtocolZujali ValopiNo ratings yet
- Шаблон-RUP. Product Acceptance PlanDocument5 pagesШаблон-RUP. Product Acceptance PlanMykolaNo ratings yet
- Case Study (Noida Library System)Document4 pagesCase Study (Noida Library System)suniltako0% (1)
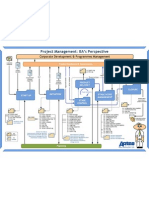
- Project Management PosterDocument1 pageProject Management Posterhamed100% (3)
- Liber Belial de Consolatione PeccatorumDocument339 pagesLiber Belial de Consolatione PeccatorumMichal-Desmond StewardNo ratings yet
- Optimization (SF1811 SF1831 SF1841)Document198 pagesOptimization (SF1811 SF1831 SF1841)Anonymous F7rNekPCu6No ratings yet
- Product Attributes and Preferences A Study of Product Attribute Preferences of Consumers and Preference Stability PDFDocument21 pagesProduct Attributes and Preferences A Study of Product Attribute Preferences of Consumers and Preference Stability PDFKris NugrozNo ratings yet
- BPRDocument13 pagesBPRSujata ChNo ratings yet
- Cse-IV-graph Theory and Combinatorics (10cs42) - NotesDocument215 pagesCse-IV-graph Theory and Combinatorics (10cs42) - NotesRajesh KannaNo ratings yet
- Paulo DimaapiDocument10 pagesPaulo DimaapiJustine Policarpio MacatoNo ratings yet
- Multi-Traffic Scene Perception Based On Supervised LearningDocument10 pagesMulti-Traffic Scene Perception Based On Supervised LearningChandhu DasariNo ratings yet
- Dynamic Transient Analysis in Predicting Disc Brake SquealDocument1 pageDynamic Transient Analysis in Predicting Disc Brake SquealantonytechnoNo ratings yet
- LenovoEMC NAS OverviewDocument4 pagesLenovoEMC NAS Overviewsuhas.ghodakeNo ratings yet
- A Survey of Feature Selection and Feature Extraction Techniques in Machine LearningDocument7 pagesA Survey of Feature Selection and Feature Extraction Techniques in Machine LearningTaufiqAriWDamanikNo ratings yet
- Linear ProgrammingDocument14 pagesLinear ProgrammingJulius Harris FamilaraNo ratings yet
- Wacom Intuos 4 XL TabletDocument2 pagesWacom Intuos 4 XL TableticreatiaNo ratings yet
- HEC ResSim Users ManualDocument512 pagesHEC ResSim Users ManualAsepFerdiansyah100% (1)
- Ymrtc LogDocument8 pagesYmrtc LogDhanNo ratings yet
- ContentDocument0 pagesContentFernando Antonio Castro RojasNo ratings yet
- Excel Short Cut Keys PDFDocument7 pagesExcel Short Cut Keys PDFRahmat UllahNo ratings yet
- Seeseenayy - CCNAv3 Completed Packet Tracer 5.1.5.7Document4 pagesSeeseenayy - CCNAv3 Completed Packet Tracer 5.1.5.7EiriedNo ratings yet