You might also like
- Composite Positional Tolerancing: 856 Salt Lake Court San Jose, Ca 95133 (408) 251-5329Document5 pagesComposite Positional Tolerancing: 856 Salt Lake Court San Jose, Ca 95133 (408) 251-5329MICKENo ratings yet
- Coplanar It yDocument4 pagesCoplanar It yBubba RocketNo ratings yet
- Quest 4 - Answered - Cat2022fce351Document6 pagesQuest 4 - Answered - Cat2022fce351devNo ratings yet
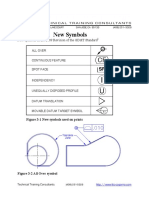
- New Symbols: New Symbols in The 2009 Revision of The GD&T StandardDocument5 pagesNew Symbols: New Symbols in The 2009 Revision of The GD&T StandardJose Manuel OSNo ratings yet
- Perpendicularity Refinement: Figure 6-4A The Inappropriate Use of The Position Control To Control PerpendicularityDocument2 pagesPerpendicularity Refinement: Figure 6-4A The Inappropriate Use of The Position Control To Control Perpendicularityprasanthme34No ratings yet
- Features Located To A PatternDocument4 pagesFeatures Located To A PatternJuan Posada GNo ratings yet
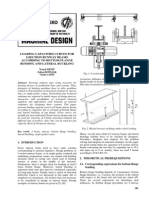
- Crane Girder Design ProcedureDocument18 pagesCrane Girder Design ProcedureBhadresh Shah0% (1)
- f13 Ce470ch4ftb CompDocument10 pagesf13 Ce470ch4ftb CompAulia Rahma AzisNo ratings yet
- CivappaDocument22 pagesCivappaliamo8888No ratings yet
- CE470-Lab1 (Sept 2010)Document5 pagesCE470-Lab1 (Sept 2010)700spymaster007No ratings yet
- ESQUEMAS UNIONES MetalicasDocument165 pagesESQUEMAS UNIONES MetalicasGuillermo Hortigüela Cordoba100% (6)
- Aircraft Structure-II UnitTest-03 2012 JJModelTest (EIT)Document2 pagesAircraft Structure-II UnitTest-03 2012 JJModelTest (EIT)ae00505No ratings yet
- Acuity Base Frame Anchorage July 3, 2008Document7 pagesAcuity Base Frame Anchorage July 3, 2008GoswandiNo ratings yet
- CE 8601 Internal 2 Answerkey 2021Document10 pagesCE 8601 Internal 2 Answerkey 2021ci_balaNo ratings yet
- GD&T QuizDocument5 pagesGD&T QuizVivek PatilNo ratings yet
- Engineering Drawing Notes: ME170 Computer Aided DesignDocument41 pagesEngineering Drawing Notes: ME170 Computer Aided Designmariopi32100% (1)
- Design Properties For Crane Runway Beam PDFDocument4 pagesDesign Properties For Crane Runway Beam PDFkayakeras3335No ratings yet
- Composite Positional TolerancingDocument5 pagesComposite Positional TolerancingCarlos García Hernández100% (1)
- Lab 2Document2 pagesLab 2macsen.malacaiNo ratings yet
- Lecture 4 TranscriptDocument9 pagesLecture 4 TranscriptUD AthukoralaNo ratings yet
- M2 CV ST D 002 (R0)Document13 pagesM2 CV ST D 002 (R0)ksshashidhar100% (1)
- Civil Services Examination-2013Document9 pagesCivil Services Examination-2013Navish KotwalNo ratings yet
- Design Properties For Crane Runway BeamsDocument4 pagesDesign Properties For Crane Runway BeamsToni RenedoNo ratings yet
- 2017 Winter Model Answer Paper PDFDocument29 pages2017 Winter Model Answer Paper PDFshivani valivNo ratings yet
- College of Engineering CE 470.: Design in Structural Steel: Welded ConnectionsDocument5 pagesCollege of Engineering CE 470.: Design in Structural Steel: Welded Connections700spymaster007No ratings yet
- Design and Analysis Aircraft Nose and Nose Landing Gear PDFDocument8 pagesDesign and Analysis Aircraft Nose and Nose Landing Gear PDFTarik Hassan ElsonniNo ratings yet
- X-008 - rp231016m40642 - Certification Review - Project MoonDocument30 pagesX-008 - rp231016m40642 - Certification Review - Project MoonTasiNo ratings yet
- Alignment PDFDocument12 pagesAlignment PDFVictor Nunez100% (1)
- Structural Steel Design: Eng Fuad Dhunkal in Civil EngineeringDocument18 pagesStructural Steel Design: Eng Fuad Dhunkal in Civil Engineeringfuaad dhunkaalNo ratings yet
- T.E MechanicalDocument62 pagesT.E MechanicalhaptooorNo ratings yet
- Aircraft Maintenance Manual: TASK 31 31 01 000 801 Removal of The Digital FDRDocument6 pagesAircraft Maintenance Manual: TASK 31 31 01 000 801 Removal of The Digital FDRCHIMONo ratings yet
- Aircraft Design EmpennageDocument56 pagesAircraft Design EmpennageTeklemichael GhirmayNo ratings yet
- Gear CalculationDocument107 pagesGear CalculationDavid Lambert100% (1)
- Parametric Wing Profile Description For ConceptualDocument13 pagesParametric Wing Profile Description For ConceptualRobert BackmanNo ratings yet
- TCC53 Column DesignDocument18 pagesTCC53 Column DesignVasileios Manginas100% (3)
- Report 5Document28 pagesReport 5Chrome BrowserNo ratings yet
- Rotopin-E Couplings: Use and Maintenance ManualDocument8 pagesRotopin-E Couplings: Use and Maintenance ManualIzzi Al-AkbarNo ratings yet
- Analisa Anchor BoltDocument7 pagesAnalisa Anchor BoltGunawan NamakuNo ratings yet
- Sebf 8269 Привод 3408Document16 pagesSebf 8269 Привод 3408mohamed hamedNo ratings yet
- 4.9 Design of Singly Symmetric Cross-SectionsDocument11 pages4.9 Design of Singly Symmetric Cross-Sectionsengineering trimatraNo ratings yet
- ForcesDocument2 pagesForcesSpammerNo ratings yet
- ME 410 PresentationDocument15 pagesME 410 PresentationMahmut KILIÇNo ratings yet
- Angleflexseat - Xls (Revision 1.2)Document4 pagesAngleflexseat - Xls (Revision 1.2)cataiceNo ratings yet
- Shi 2013Document6 pagesShi 2013amirbakhtiary97No ratings yet
- Dokumen - Tips - Toyota BT C3e150r Forklift Service Repair Manual 1623177478Document22 pagesDokumen - Tips - Toyota BT C3e150r Forklift Service Repair Manual 1623177478npNo ratings yet
- Machine Design Spreadsheet AnalysisDocument89 pagesMachine Design Spreadsheet AnalysisfsijestNo ratings yet
- Load Rating Training Session 4ADocument45 pagesLoad Rating Training Session 4Atofa01No ratings yet
- B12 Engine Mounting: To IndexDocument13 pagesB12 Engine Mounting: To IndexKwun Hok ChongNo ratings yet
- Lecture 4 Design of The Connecting Rod: April 2020Document10 pagesLecture 4 Design of The Connecting Rod: April 2020MaruthiNo ratings yet
- WheelHorse Three Point Hitch 8-5421 Owners ManualDocument4 pagesWheelHorse Three Point Hitch 8-5421 Owners ManualKevins Small Engine and Tractor Service100% (1)
- GD T ExamplesDocument10 pagesGD T ExamplesJuan Posada GNo ratings yet
- Doubly Reinforced Concrete ExcelDocument83 pagesDoubly Reinforced Concrete ExcelShielaSabadoNo ratings yet
- LEADQUIZFCE351Document5 pagesLEADQUIZFCE351devNo ratings yet
- Jacking The Aircraft - Jacking - HoistingDocument4 pagesJacking The Aircraft - Jacking - Hoistingrama AmeesNo ratings yet
- 181-186 For Web PDFDocument6 pages181-186 For Web PDFdiego.peinado8856100% (1)
- Pressure Vessel and Stacks Field Repair ManualFrom EverandPressure Vessel and Stacks Field Repair ManualRating: 4 out of 5 stars4/5 (4)
- Aircraft Design of WWII: A SketchbookFrom EverandAircraft Design of WWII: A SketchbookRating: 5 out of 5 stars5/5 (1)
- Internal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsFrom EverandInternal Combustion Engine Bearings Lubrication in Hydrodynamic BearingsNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- A Classification System to Describe Workpieces: DefinitionsFrom EverandA Classification System to Describe Workpieces: DefinitionsW. R. MacconnellNo ratings yet
- Gaming Ports MikrotikDocument6 pagesGaming Ports MikrotikRay OhmsNo ratings yet
- Notes On Antibodies PropertiesDocument3 pagesNotes On Antibodies PropertiesBidur Acharya100% (1)
- EGurukul - RetinaDocument23 pagesEGurukul - RetinaOscar Daniel Mendez100% (1)
- Top 100 Chemical CompaniesDocument11 pagesTop 100 Chemical Companiestawhide_islamicNo ratings yet
- CAA Safety Plan 2011 To 2013Document46 pagesCAA Safety Plan 2011 To 2013cookie01543No ratings yet
- Hydro Electric Fire HistoryDocument3 pagesHydro Electric Fire HistorygdmurfNo ratings yet
- Organic Chemistry 1Document265 pagesOrganic Chemistry 1Israk Mustakim IslamNo ratings yet
- Data Sheet Eldar Void SpinnerDocument1 pageData Sheet Eldar Void SpinnerAlex PolleyNo ratings yet
- Manual E07ei1Document57 pagesManual E07ei1EiriHouseNo ratings yet
- Smart Protein Plant Based Food Sector Report 2Document199 pagesSmart Protein Plant Based Food Sector Report 2campeon00magnatesNo ratings yet
- Satish Gujral - FinalDocument23 pagesSatish Gujral - Finalsatya madhuNo ratings yet
- ADC of PIC MicrocontrollerDocument4 pagesADC of PIC Microcontrollerkillbill100% (2)
- Jee MainsDocument32 pagesJee Mainsjhaayushbhardwaj9632No ratings yet
- Odisha State Museum-1Document26 pagesOdisha State Museum-1ajitkpatnaikNo ratings yet
- E-Versuri Ro - Rihana - UmbrelaDocument2 pagesE-Versuri Ro - Rihana - Umbrelaanon-821253100% (1)
- Airport & Harbour Engg-AssignmentDocument3 pagesAirport & Harbour Engg-AssignmentAshok Kumar RajanavarNo ratings yet
- HSCC SRH 0705 PDFDocument1 pageHSCC SRH 0705 PDFBhawna KapoorNo ratings yet
- CS8CHP EletricalDocument52 pagesCS8CHP EletricalCristian ricardo russoNo ratings yet
- BLP#1 - Assessment of Community Initiative (3 Files Merged)Document10 pagesBLP#1 - Assessment of Community Initiative (3 Files Merged)John Gladhimer CanlasNo ratings yet
- Stentofon Pulse: IP Based Intercom SystemDocument22 pagesStentofon Pulse: IP Based Intercom SystemCraigNo ratings yet
- Student Management SystemDocument232 pagesStudent Management Systemslu_mangal73% (37)
- Dec JanDocument6 pagesDec Janmadhujayan100% (1)
- Ring and Johnson CounterDocument5 pagesRing and Johnson CounterkrsekarNo ratings yet
- Playing With Pop-Ups - The Art of Dimensional, Moving Paper DesignsDocument147 pagesPlaying With Pop-Ups - The Art of Dimensional, Moving Paper DesignsSara100% (4)
- Chemistry Investigatory Project (R)Document23 pagesChemistry Investigatory Project (R)BhagyashreeNo ratings yet
- 928 Diagnostics Manual v2.7Document67 pages928 Diagnostics Manual v2.7Roger Sego100% (2)
- Gracie Warhurst WarhurstDocument1 pageGracie Warhurst Warhurstapi-439916871No ratings yet
- Case Study - Kelompok 2Document5 pagesCase Study - Kelompok 2elida wenNo ratings yet
- Antibiotic Zone Interpretation Guide PDFDocument2 pagesAntibiotic Zone Interpretation Guide PDFFarandy Insan Sejati100% (2)
- Power Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Document18 pagesPower Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Scribd Government DocsNo ratings yet