You might also like
- Tarjeta Controladora de Un MotorDocument6 pagesTarjeta Controladora de Un MotorAlex LandazuriNo ratings yet
- Tarjeta Controladora de Un MotorDocument6 pagesTarjeta Controladora de Un MotorAlex LandazuriNo ratings yet
- Exposicion Medio AmbienteDocument15 pagesExposicion Medio AmbienteAlex LandazuriNo ratings yet
- Módulos de trabajo de electrotecniaDocument3 pagesMódulos de trabajo de electrotecniaAlex LandazuriNo ratings yet
- Coldmax Refrigeracion Al VacioDocument4 pagesColdmax Refrigeracion Al VacioAlex LandazuriNo ratings yet
- Maquinas HidraulicasDocument1 pageMaquinas HidraulicasAlex LandazuriNo ratings yet
- Geometría de EjesDocument2 pagesGeometría de EjesAlex LandazuriNo ratings yet
- Energía solar fotovoltaica para riego por goteoDocument6 pagesEnergía solar fotovoltaica para riego por goteoAlex LandazuriNo ratings yet
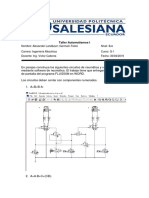
- Taller Automatismos IDocument2 pagesTaller Automatismos IAlex LandazuriNo ratings yet
- Diagramabloques 140627021130 Phpapp01 PDFDocument27 pagesDiagramabloques 140627021130 Phpapp01 PDFAlex LandazuriNo ratings yet
- Sistema de Control Que Permite El Vuelo Autónomo de DronesDocument6 pagesSistema de Control Que Permite El Vuelo Autónomo de DronesJuan PerezNo ratings yet
- UPS Matrícula Ingeniería Mecánica 2019Document1 pageUPS Matrícula Ingeniería Mecánica 2019Alex LandazuriNo ratings yet
- Enfriamiento Al Vacio de Frutas y VerdurasDocument3 pagesEnfriamiento Al Vacio de Frutas y VerdurasAlex LandazuriNo ratings yet
- Lab de Instalaciones Electricas UpsDocument10 pagesLab de Instalaciones Electricas UpsAlex LandazuriNo ratings yet
- Petro EcuadorDocument172 pagesPetro EcuadorAlex LandazuriNo ratings yet
- Mediante Resistencia de EstatorDocument4 pagesMediante Resistencia de EstatorAlex LandazuriNo ratings yet
- Pie de Rey - MicrometroDocument10 pagesPie de Rey - MicrometroAlex LandazuriNo ratings yet
- Informe FundicionDocument12 pagesInforme FundicionAlex LandazuriNo ratings yet
- Monografia 6 Andres PusdaDocument7 pagesMonografia 6 Andres PusdaAlex LandazuriNo ratings yet
- Robótica II - Planificación de Trayectorias - V2019 - 2Document44 pagesRobótica II - Planificación de Trayectorias - V2019 - 2Arturo Alberts Arizaca SancaNo ratings yet
- Asimov Isaac - 00 Indice de RelatosDocument8 pagesAsimov Isaac - 00 Indice de RelatosGladiaDelNo ratings yet
- Datos Técnicos de Robots Manipuladores IndustrialesDocument3 pagesDatos Técnicos de Robots Manipuladores IndustrialesLola Lopez100% (1)
- AnoSeka-Volumen1-Volumen Completo (HT)Document165 pagesAnoSeka-Volumen1-Volumen Completo (HT)Anime.Mx. FansNo ratings yet
- Robot de AutobalanceoDocument51 pagesRobot de AutobalanceoScott Melgarejo100% (1)
- Robot HexápodoDocument9 pagesRobot HexápodoFranco Llasaca MercadoNo ratings yet
- El Futuro Del TrabajoDocument13 pagesEl Futuro Del TrabajoJACOB ALEJANDRO RIERA MEDIAVILLANo ratings yet
- Robot Diferencial Etapa 3Document5 pagesRobot Diferencial Etapa 3Eduardo SolisNo ratings yet
- Introducción A La RoboticaDocument102 pagesIntroducción A La RoboticaDaniel Hernandez Pitalúa100% (1)
- Cony - NanotecnologíaDocument34 pagesCony - Nanotecnologíachristian vergara espinozaNo ratings yet
- Entrevista A ObijuanDocument10 pagesEntrevista A ObijuanTecno-Lògics BellvitgeNo ratings yet
- Reseña Bibliografica Sobre La Inteligencia ArtificialDocument4 pagesReseña Bibliografica Sobre La Inteligencia ArtificialAnonymous KFOB1lNo ratings yet
- Cuadernillo 7 Tercer Grado InformáticaDocument6 pagesCuadernillo 7 Tercer Grado InformáticaAmerica TecnologiaNo ratings yet
- Unidad 1 Morfologia Den Robot PDFDocument31 pagesUnidad 1 Morfologia Den Robot PDFs_barriosNo ratings yet
- Tesis de Brazo Robot PaletizadoDocument102 pagesTesis de Brazo Robot PaletizadojulitoroncalNo ratings yet
- Mecatron 1 CaDocument21 pagesMecatron 1 CaAnton JWNo ratings yet
- CTIC UNI Robtica Educativa para Adultos PDFDocument5 pagesCTIC UNI Robtica Educativa para Adultos PDFJoel Alexander Quispe AltamiranoNo ratings yet
- Mini SumoDocument7 pagesMini Sumomiguel puentesNo ratings yet
- La Familia Mitchel Contra Las MaquinasDocument3 pagesLa Familia Mitchel Contra Las Maquinasitachi God (gamer)No ratings yet
- Que Es La RobóticaDocument8 pagesQue Es La RobóticaJosue Diaz SanabriaNo ratings yet
- Lecturas Recomendadas para 1º BachilleratoDocument6 pagesLecturas Recomendadas para 1º Bachilleratoantoniolopez_32No ratings yet
- Deber Semana 2 Rodolfo MenaDocument3 pagesDeber Semana 2 Rodolfo MenaRudolph LowNo ratings yet
- PFC David Ortiz Martínez PDFDocument106 pagesPFC David Ortiz Martínez PDFJaime Alberto Parra PlazasNo ratings yet
- S13 Automatización Robóts y HumanoidesDocument48 pagesS13 Automatización Robóts y HumanoidesMilagros Mateo MunaycoNo ratings yet
- Lab Nº5 - Cinematica - MGeo y MMTH - 2019 - ImparDocument2 pagesLab Nº5 - Cinematica - MGeo y MMTH - 2019 - ImparAnonymous ss4DmEjNo ratings yet
- ks142 3.75MB CompactaDocument92 pagesks142 3.75MB CompactaABRAHAMNo ratings yet
- Electiva III Informe 7Document4 pagesElectiva III Informe 7Gabriel HernándezNo ratings yet
- Inteligencia ArtificialDocument12 pagesInteligencia Artificialmayra100% (3)
- Salvase Quien Pueda 1Document14 pagesSalvase Quien Pueda 1Scarlett LunaNo ratings yet