You might also like
- Refrigeration and Air-Conditioning by C P Arora 3 EdDocument962 pagesRefrigeration and Air-Conditioning by C P Arora 3 EdDivyank Kumar75% (8)
- Hydraulic ForkliftDocument21 pagesHydraulic ForkliftHector Sepulveda OrellanaNo ratings yet
- A Combined For Hydrodynamic Characteristics Planing CraftsDocument14 pagesA Combined For Hydrodynamic Characteristics Planing CraftsEnriqueNo ratings yet
- A Review of The Surface Drives Employed For High Speed Planing Craft-EskafiDocument8 pagesA Review of The Surface Drives Employed For High Speed Planing Craft-EskafiJUNIOR OLIVONo ratings yet
- 2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationsDocument10 pages2014 - Omae - Dynamic Behaviour of The Loads of Podded Propellers in Waves Experimental and Numerical SimulationshenkNo ratings yet
- Badoe Simman2014Document8 pagesBadoe Simman2014Prasad PatilNo ratings yet
- Rahimian 2018Document22 pagesRahimian 2018nitin maratheNo ratings yet
- DES-based Computation of The Flow Around The Darpa SuboffDocument10 pagesDES-based Computation of The Flow Around The Darpa SuboffShahbazNo ratings yet
- Bekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004Document12 pagesBekhit 2018 IOP Conf. Ser. - Mater. Sci. Eng. 400 042004ciksunNo ratings yet
- Ocean Engineering: Fei Liao, Shizhao Wang, Xiaolei Yang, Guowei HeDocument11 pagesOcean Engineering: Fei Liao, Shizhao Wang, Xiaolei Yang, Guowei HeFreddie RomeroNo ratings yet
- Application of New Body-Force Concept To The Free Surface Effect On The Hydrodynamic Force and Ow Around A Rotating PropellerDocument7 pagesApplication of New Body-Force Concept To The Free Surface Effect On The Hydrodynamic Force and Ow Around A Rotating PropellerTạ Đức HuyNo ratings yet
- CFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioDocument8 pagesCFD Analysis of Propeller Performance in Oblique Flow: Giulio Dubbioso, Roberto Muscari, Andrea Di MascioNoumanNo ratings yet
- Design Optimization of A Horizontal Axis Tidal STRDocument9 pagesDesign Optimization of A Horizontal Axis Tidal STRMurali K oe16d017No ratings yet
- Flow Measurement and Instrumentation: M. Cihan Aydin, M. Emin EmirogluDocument9 pagesFlow Measurement and Instrumentation: M. Cihan Aydin, M. Emin EmirogluThaer HashemNo ratings yet
- From Single To Multistage Marine Propulsor A FullyDocument12 pagesFrom Single To Multistage Marine Propulsor A FullySaeed JavdaniNo ratings yet
- Renewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof SobczakDocument8 pagesRenewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof Sobczakhassan zohairNo ratings yet
- Numerical Simulations of The Hydrodynamic PerformaDocument18 pagesNumerical Simulations of The Hydrodynamic Performaمجتبی فرامرزیNo ratings yet
- Comparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionDocument8 pagesComparison of Various Approaches To Numerical Simulation of Ship Resistance and PropulsionKariem ZakiNo ratings yet
- Paper23109 113Document5 pagesPaper23109 113rogerNo ratings yet
- Applmech 02 00009Document12 pagesApplmech 02 00009SubhasreeNo ratings yet
- Numerical Analysis of Turbulent Flow in CentrifugaDocument18 pagesNumerical Analysis of Turbulent Flow in Centrifugabudi_kamilNo ratings yet
- Small-Craft Power PredictionsDocument33 pagesSmall-Craft Power PredictionsbourneremembersNo ratings yet
- A Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435Document13 pagesA Systematic Comparison Between RANS and Panel Methods For Propeller Analysis 4435cupidkhhNo ratings yet
- Optimisation of Low Head TurbineDocument10 pagesOptimisation of Low Head TurbinearjunNo ratings yet
- Aerospace Science and TechnologyDocument13 pagesAerospace Science and TechnologyAHMEDNo ratings yet
- Optimization of A Diver Propulsion Vehicle Hydrodynamics Parameter and Its' Shape Improvement by CFD Method For Improving Underwater Speed RecordDocument10 pagesOptimization of A Diver Propulsion Vehicle Hydrodynamics Parameter and Its' Shape Improvement by CFD Method For Improving Underwater Speed RecordSudarshan MadeswaranNo ratings yet
- InTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicDocument22 pagesInTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicMol MolNo ratings yet
- Sjet 104 16-34Document20 pagesSjet 104 16-34Rakhi JadhavNo ratings yet
- Fedsm2016 7889 PDFDocument11 pagesFedsm2016 7889 PDFJohn StoneNo ratings yet
- Ocean Engineering: Arash Nemati Hayati, Seyed Mohammad Hashemi, Mehrzad ShamsDocument12 pagesOcean Engineering: Arash Nemati Hayati, Seyed Mohammad Hashemi, Mehrzad Shamsomar ahmedNo ratings yet
- Sciencedirect: A Numerical Case Study: Bovet Approach To Design A Francis Turbine RunnerDocument10 pagesSciencedirect: A Numerical Case Study: Bovet Approach To Design A Francis Turbine RunnerFilip StojkovskiNo ratings yet
- Full Rotor Modelling and Generalized Actuator Disc For Wind T - 2020 - Energy ReDocument24 pagesFull Rotor Modelling and Generalized Actuator Disc For Wind T - 2020 - Energy ReИлия ГеоргиевNo ratings yet
- Water Jet 3Document8 pagesWater Jet 3Pedro SalazarNo ratings yet
- Preprints201608 0008 v1Document11 pagesPreprints201608 0008 v1Bhaskar NandiNo ratings yet
- Impact of Hull Propeller Rudder Interaction On Ship Powering AssessmentDocument15 pagesImpact of Hull Propeller Rudder Interaction On Ship Powering AssessmentPedro ParenteNo ratings yet
- Effects of The Approximations Embodied in The Momentum Theory As Applied To The NREL PHASE VI Wind TurbineDocument12 pagesEffects of The Approximations Embodied in The Momentum Theory As Applied To The NREL PHASE VI Wind Turbinedanea haitham abd alrahmanNo ratings yet
- Ciba PMRes 2021 1Document6 pagesCiba PMRes 2021 1trongndNo ratings yet
- Numerical Investigation of Flow Around A 3D B 2017 International Journal ofDocument11 pagesNumerical Investigation of Flow Around A 3D B 2017 International Journal ofSHUBHAMNo ratings yet
- Energies: Performance Analysis and Optimization of A Vertical-Axis Wind Turbine With A High Tip-Speed RatioDocument27 pagesEnergies: Performance Analysis and Optimization of A Vertical-Axis Wind Turbine With A High Tip-Speed Ratiohuy4ngooNo ratings yet
- CFD JnalDocument12 pagesCFD Jnalamsubra8874No ratings yet
- IJMPERD - Investigation Potential Flow About Curved WingDocument12 pagesIJMPERD - Investigation Potential Flow About Curved WingTJPRC PublicationsNo ratings yet
- Automated Marine Propeller Design Combining Hydrodynamics Models and Neural NetworksDocument10 pagesAutomated Marine Propeller Design Combining Hydrodynamics Models and Neural NetworksPoowadol NiyomkaNo ratings yet
- Daneshkah (2010) - Parametric Design of A Francis Turbine (Método Inverso)Document11 pagesDaneshkah (2010) - Parametric Design of A Francis Turbine (Método Inverso)HorácioNo ratings yet
- Nutts - 17 - 2014 - Marstrand - Nmerical Towing Tank Symposium PDFDocument206 pagesNutts - 17 - 2014 - Marstrand - Nmerical Towing Tank Symposium PDFJai FrinzNo ratings yet
- CFD Simulation of Flows in Stirred Tank Reactors Through Prediction of Momentum SourceDocument20 pagesCFD Simulation of Flows in Stirred Tank Reactors Through Prediction of Momentum SourceSachin AngirishNo ratings yet
- Marine Propeller Design Using CFD ToolsDocument9 pagesMarine Propeller Design Using CFD ToolsadinaNo ratings yet
- Numerical Analysis of Full-Scale Ship Self-Propulsion Performance With Direct Comparison To Statistical Sea Trail ResultsDocument22 pagesNumerical Analysis of Full-Scale Ship Self-Propulsion Performance With Direct Comparison To Statistical Sea Trail ResultsAJAY LAKSHAMANANNo ratings yet
- 2018 Book CFDTechniquesAndEnergyApplicatDocument199 pages2018 Book CFDTechniquesAndEnergyApplicatPablo GómezNo ratings yet
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
- Jmse 08 00897 v3Document26 pagesJmse 08 00897 v3Renatto Yupa VillanuevaNo ratings yet
- Tandem Analysis Effects On Bluff Bodies AerodynamicsDocument10 pagesTandem Analysis Effects On Bluff Bodies AerodynamicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- J Matpr 2021 02 127Document6 pagesJ Matpr 2021 02 127Anh NgoNo ratings yet
- Timedomain Aeroelastic Analysis of Agard 4456 WingDocument5 pagesTimedomain Aeroelastic Analysis of Agard 4456 WingHassanNo ratings yet
- A Combined Method For The Hydrodynamic CDocument13 pagesA Combined Method For The Hydrodynamic CTihomir MarkovicNo ratings yet
- TA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANDocument11 pagesTA3-3-Krasilnikov - Analysis of Unsteady Propeller Blade Forces by RANhemsladyvsky9164No ratings yet
- Effect of Hydroplane Profile On Hydrodynamic Coefficients of An Autonomous Underwater Vehicle PDFDocument23 pagesEffect of Hydroplane Profile On Hydrodynamic Coefficients of An Autonomous Underwater Vehicle PDFMol MolNo ratings yet
- CFD Effect of Streamline Curvature On Flow Field of A Turbulent PDFDocument8 pagesCFD Effect of Streamline Curvature On Flow Field of A Turbulent PDFmojicapNo ratings yet
- Document2 PDFDocument16 pagesDocument2 PDFFernando RodríguezNo ratings yet
- Transonic, Shock, and Multidimensional Flows: Advances in Scientific ComputingFrom EverandTransonic, Shock, and Multidimensional Flows: Advances in Scientific ComputingNo ratings yet
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodFrom EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodNo ratings yet
- Nsport Phenomena in Materials Engineering PDF Book - Mediafile Free File SharingDocument3 pagesNsport Phenomena in Materials Engineering PDF Book - Mediafile Free File SharingSanjeev Sahu0% (1)
- 8 PDFDocument92 pages8 PDFSadegh AhmadiNo ratings yet
- CWC-BookletF1 29 PDFDocument1 pageCWC-BookletF1 29 PDFJagannath SahuNo ratings yet
- Caldera Cleaver Brooks Modelo 4WGDocument124 pagesCaldera Cleaver Brooks Modelo 4WGChristian GuerraNo ratings yet
- OHPC Balimela Volume 3Document259 pagesOHPC Balimela Volume 3gmdgfkNo ratings yet
- Hydraulic Calculation For Pumps: Lamah EstDocument22 pagesHydraulic Calculation For Pumps: Lamah Estrize1159No ratings yet
- Multi Pressure DistillationDocument19 pagesMulti Pressure DistillationHardik ChauhanNo ratings yet
- Developing A MATLAB Model For Flat Solar CollectorsDocument7 pagesDeveloping A MATLAB Model For Flat Solar Collectorsgonzalez2678No ratings yet
- Super Fractionation CH 41Document10 pagesSuper Fractionation CH 41Abhimanyu SharmaNo ratings yet
- Xeed Brochure 2016Document6 pagesXeed Brochure 2016GaneshNo ratings yet
- High Pressure Accessories Catalog: Edition January 2008 V.03Document122 pagesHigh Pressure Accessories Catalog: Edition January 2008 V.03marcxl2808No ratings yet
- Simulation Studies On GAX Absorption Compression CoolerDocument7 pagesSimulation Studies On GAX Absorption Compression CooleralmadhagiNo ratings yet
- Sru5 168 HDDocument1 pageSru5 168 HDvicenteNo ratings yet
- Liquid PumpsDocument16 pagesLiquid PumpsBruno BrepohlNo ratings yet
- Duct Static Pressure Calculation PDFDocument6 pagesDuct Static Pressure Calculation PDFVenkata Subramanyam KotaNo ratings yet
- Experiment 1 - Control ValveDocument13 pagesExperiment 1 - Control ValveRobert Gilmore100% (3)
- Series FV: Cantilever Sump PumpsDocument4 pagesSeries FV: Cantilever Sump PumpsFranciscoNo ratings yet
- PumpsDocument85 pagesPumpsdenizkund100% (2)
- BSEN201461 ExtractDocument1 pageBSEN201461 ExtractKumudana AdhikariNo ratings yet
- Micro FiltDocument6 pagesMicro FiltJorge ChaconNo ratings yet
- 1963 - Becker - Mixing and Flow in Ducted Turbulent JetsDocument14 pages1963 - Becker - Mixing and Flow in Ducted Turbulent JetslucasphpNo ratings yet
- 2017 - Review of Nature-Inspired Heat Exchanger TechnologyDocument17 pages2017 - Review of Nature-Inspired Heat Exchanger TechnologyCarlos Fernando Rojas TovarNo ratings yet
- Charging GaugingDocument5 pagesCharging Gaugings wNo ratings yet
- Course O-5003 Centrifugal Pump Analysis For Petroleum ApplicationsDocument70 pagesCourse O-5003 Centrifugal Pump Analysis For Petroleum ApplicationsPok Jak Salleh100% (1)
- Analysis of The Performance of A Novel Dust Collector Combining Cyclone Separator and Cartridge FilterDocument8 pagesAnalysis of The Performance of A Novel Dust Collector Combining Cyclone Separator and Cartridge FilterdadNo ratings yet
- BQ Pengadaan Pertashop 3 KL Gen3 - Rev.1-DikonversiDocument4 pagesBQ Pengadaan Pertashop 3 KL Gen3 - Rev.1-DikonversiArie WigunaNo ratings yet
- Colfax Americas / Imo PumpDocument8 pagesColfax Americas / Imo PumprajeegargNo ratings yet
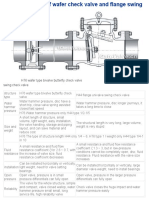
- The Comparison of Wafer Check Valve and Flange Swing Check Valve - Made in China Check ValvesDocument1 pageThe Comparison of Wafer Check Valve and Flange Swing Check Valve - Made in China Check Valvesselmir_9No ratings yet