You might also like
- Participation Factor in Modal Analysis of Power Systems StabilityDocument8 pagesParticipation Factor in Modal Analysis of Power Systems StabilityAadi JeevanNo ratings yet
- Participation Factor in Modal Analysis of Power Systems StabilityDocument8 pagesParticipation Factor in Modal Analysis of Power Systems StabilityAadi JeevanNo ratings yet
- Analysis of Strong Resonance in Power Systems With Statcom SupplDocument5 pagesAnalysis of Strong Resonance in Power Systems With Statcom SupplThirumalaivasan RajaramNo ratings yet
- Passivity and ComplementarityDocument33 pagesPassivity and ComplementarityRubén de los Santos ReyesNo ratings yet
- Modeling and Simulation of A Series Resonant InverterDocument6 pagesModeling and Simulation of A Series Resonant InverterkaaisNo ratings yet
- Logistic Map Circuit PDFDocument8 pagesLogistic Map Circuit PDFmenguemengueNo ratings yet
- On Quadratic Differential FormsDocument47 pagesOn Quadratic Differential Formspawanhv1454No ratings yet
- Indirect Adaptive State Feedback Control of Linearly Parametrized Non-Linear SystemsDocument14 pagesIndirect Adaptive State Feedback Control of Linearly Parametrized Non-Linear SystemsShadNo ratings yet
- Passivity Verification and Enforcement-A Review Paper: Protap Kumar Mahanta Nuzhat Yamin Ata ZadehgolDocument16 pagesPassivity Verification and Enforcement-A Review Paper: Protap Kumar Mahanta Nuzhat Yamin Ata ZadehgolMahendran CNo ratings yet
- Global Stochastic Synchronization of Chaotic OscillatorsDocument6 pagesGlobal Stochastic Synchronization of Chaotic OscillatorsBit32No ratings yet
- Keywords:: Journal of Automation & Systems EngineeringDocument18 pagesKeywords:: Journal of Automation & Systems EngineeringMongiBESBESNo ratings yet
- On Sensitivities, Residues and Participations - Applications To Oscillatory Stability AnaDocument8 pagesOn Sensitivities, Residues and Participations - Applications To Oscillatory Stability AnaabelcatayNo ratings yet
- Week 1B - Online Classes - S2020Document25 pagesWeek 1B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Unesco - Eolss Sample Chapters: Eigenstructure Assignment For ControlDocument9 pagesUnesco - Eolss Sample Chapters: Eigenstructure Assignment For ControlBill MooreNo ratings yet
- On Linearization of A Class of Nonlinear Vector Implicit Differential Equation With Application To RoboticsDocument6 pagesOn Linearization of A Class of Nonlinear Vector Implicit Differential Equation With Application To RoboticsAndres ViverosNo ratings yet
- Adaptive Identification and Control of Dynamical Systems Using N PDFDocument2 pagesAdaptive Identification and Control of Dynamical Systems Using N PDFKeerthana g.krishnanNo ratings yet
- Application of Numerical Methods in Chemical Process EngineeringDocument19 pagesApplication of Numerical Methods in Chemical Process EngineeringMuhammad HassanNo ratings yet
- Inverse Iteration Method For Finding EigenvectorsDocument4 pagesInverse Iteration Method For Finding Eigenvectors王轩No ratings yet
- Anh Adaptive Observer Design For Linear Descriptor SystemsDocument6 pagesAnh Adaptive Observer Design For Linear Descriptor Systemsghassen marouaniNo ratings yet
- W3a PDFDocument26 pagesW3a PDFShujah RashidNo ratings yet
- Optimal Control of Buck Converter by State Feedback LinearizationDocument6 pagesOptimal Control of Buck Converter by State Feedback LinearizationShadNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Lecture Chapter1 8newDocument188 pagesLecture Chapter1 8newDinuka RavimalNo ratings yet
- Model-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsDocument13 pagesModel-Free Offline Change-Point Detection Multidimensional Time Series of Arbitrary Nature Via ?-Complexity Simulations and ApplicationsWong Chiong LiongNo ratings yet
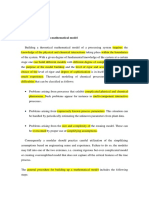
- 1.7 Building Steps For A Mathematical ModelDocument18 pages1.7 Building Steps For A Mathematical ModelratnasabapathyNo ratings yet
- Likelihood Functions For State Space Models With Diffuse Initial ConditionsDocument26 pagesLikelihood Functions For State Space Models With Diffuse Initial ConditionsAditya KumarNo ratings yet
- Sung2011 Article RobustObserver-basedFuzzyContrDocument8 pagesSung2011 Article RobustObserver-basedFuzzyContrMohammed BenNo ratings yet
- Modes in Linear CircuitsDocument13 pagesModes in Linear CircuitsmtichyNo ratings yet
- Stability Analysis For VAR SystemsDocument11 pagesStability Analysis For VAR SystemsCristian CernegaNo ratings yet
- Approximation Techniques in Complex Reaction Kinetics: DannyDocument18 pagesApproximation Techniques in Complex Reaction Kinetics: DannyDeep GhoseNo ratings yet
- Correlation Tensor Criteria For Genuine Multiqubit EntanglementDocument9 pagesCorrelation Tensor Criteria For Genuine Multiqubit EntanglementShweta SridharNo ratings yet
- Improving The Accuracy of Computed Eigenvalues and EigenvectorsDocument23 pagesImproving The Accuracy of Computed Eigenvalues and EigenvectorsFilipe AmaroNo ratings yet
- Colloidal SystemDocument13 pagesColloidal SystemCristinaNo ratings yet
- Spurious Modes in Two-Dimensional Isoparametric ElementsDocument13 pagesSpurious Modes in Two-Dimensional Isoparametric ElementskramaseshanNo ratings yet
- Sybilla PRADocument12 pagesSybilla PRACarlos BenavidesNo ratings yet
- Ket Bra OperatorsDocument33 pagesKet Bra OperatorsZaheerIqbalNo ratings yet
- 2 1 2 08 ProofDocument12 pages2 1 2 08 ProofMongiBESBESNo ratings yet
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDocument8 pagesSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984No ratings yet
- Stability and Convergence Properties of Dynamic Average Consensus EstimatorsDocument6 pagesStability and Convergence Properties of Dynamic Average Consensus EstimatorsSmith TomNo ratings yet
- Lecture 12 Spreadsheets Pt2Document27 pagesLecture 12 Spreadsheets Pt2Mani SekarNo ratings yet
- The Influence of The Lorenz System Fractionality oDocument5 pagesThe Influence of The Lorenz System Fractionality oJulexy AntonellaNo ratings yet
- Mismatch-Revised PaperDocument10 pagesMismatch-Revised PaperFrancesco SorrentinoNo ratings yet
- Nonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential FlatnessDocument6 pagesNonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential Flatnessanon_93685582No ratings yet
- Entanglement of Formation of An Arbitrary State of Two QubitsDocument4 pagesEntanglement of Formation of An Arbitrary State of Two QubitsSreetama DasNo ratings yet
- Modeling and Simulation of Dynamic Systems: Lecture Notes of ME 862Document9 pagesModeling and Simulation of Dynamic Systems: Lecture Notes of ME 862RajrdbNo ratings yet
- Introduction To Molecular Dynamics SimulationDocument30 pagesIntroduction To Molecular Dynamics SimulationJustin BrockNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- Computers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnyDocument12 pagesComputers and Mathematics With Applications: Yan Li, Yangquan Chen, Igor PodlubnykarpagasenthilpandyNo ratings yet
- RootDocument7 pagesRootghassen marouaniNo ratings yet
- Parameter For Dynalnic System Performance: "Ari TionDocument8 pagesParameter For Dynalnic System Performance: "Ari TionPriyanshu KumawatNo ratings yet
- Linear Graph Modeling: State Equation FormulationDocument38 pagesLinear Graph Modeling: State Equation Formulation古卜升No ratings yet
- Mathematical Modeling of Planar Mechanisms With Compliant JointsDocument7 pagesMathematical Modeling of Planar Mechanisms With Compliant JointsDavid C HouserNo ratings yet
- Control of A Magnetic Suspension System: Module Code: Module NameDocument30 pagesControl of A Magnetic Suspension System: Module Code: Module NameruhanNo ratings yet
- OscillatorsDocument15 pagesOscillatorsdamilolaa_xNo ratings yet
- Chapter 5Document39 pagesChapter 5HemantNo ratings yet
- Single-Phase PQ Theory For Active Filters: December 2002Document5 pagesSingle-Phase PQ Theory For Active Filters: December 2002Snehal GajreNo ratings yet
- A Matlab-Based Tool For Power System Dynamics Analysis: A Comparison With PSS/EDocument5 pagesA Matlab-Based Tool For Power System Dynamics Analysis: A Comparison With PSS/ELuis Alonso Aguirre LopezNo ratings yet
- MPPT Approach For Wind Farm Control - Van Dam Gebraad Van Wingerden - Torque 2012 PDFDocument10 pagesMPPT Approach For Wind Farm Control - Van Dam Gebraad Van Wingerden - Torque 2012 PDFwan ismail ibrahimNo ratings yet
- Assessment of The Riverine Hydrokinetic Energy Resources in LithuanaDocument11 pagesAssessment of The Riverine Hydrokinetic Energy Resources in Lithuanawan ismail ibrahimNo ratings yet
- Level in Meters and Rainfall (RF) in Milimeters Name, Date, Time, LEVEL (M), Cumm RF, Daily RFDocument10 pagesLevel in Meters and Rainfall (RF) in Milimeters Name, Date, Time, LEVEL (M), Cumm RF, Daily RFwan ismail ibrahimNo ratings yet
- Rural Power Supply StrategyDocument45 pagesRural Power Supply Strategywan ismail ibrahimNo ratings yet
- Energising A Sustainable Future: Cypark Resources Berhad (642994-H)Document142 pagesEnergising A Sustainable Future: Cypark Resources Berhad (642994-H)wan ismail ibrahim100% (1)
- Analysis of Fuzzy Logic Based Frequency Controller For Wind Farms Augmented With Energy Storage SystemDocument7 pagesAnalysis of Fuzzy Logic Based Frequency Controller For Wind Farms Augmented With Energy Storage Systemwan ismail ibrahimNo ratings yet
- Powering: Sustainable FutureDocument144 pagesPowering: Sustainable Futurewan ismail ibrahimNo ratings yet
- Matlab III: Graphics and Data Analysis: Updated: August 2012Document39 pagesMatlab III: Graphics and Data Analysis: Updated: August 2012wan ismail ibrahimNo ratings yet
- Reviews: Pontoon, An Alternative Flexibale Cheap Mounting Option For The Renewable Decentralized River Current Turbine..Document6 pagesReviews: Pontoon, An Alternative Flexibale Cheap Mounting Option For The Renewable Decentralized River Current Turbine..wan ismail ibrahimNo ratings yet
- The Use of The Helical Turbine in River CurrentsDocument19 pagesThe Use of The Helical Turbine in River Currentswan ismail ibrahimNo ratings yet
- Turbine Generator Unit (Tgu) : RivgenDocument2 pagesTurbine Generator Unit (Tgu) : Rivgenwan ismail ibrahimNo ratings yet
- 25 KW Hydrokinetic Turbine: System Specification SheetDocument2 pages25 KW Hydrokinetic Turbine: System Specification Sheetwan ismail ibrahimNo ratings yet
- Technology Assessments: Chapter 4: Advancing Clean Electric Power TechnologiesDocument23 pagesTechnology Assessments: Chapter 4: Advancing Clean Electric Power Technologieswan ismail ibrahimNo ratings yet
- Thesis DefenseDocument59 pagesThesis Defensewan ismail ibrahimNo ratings yet
- Arduino Mega: PWM Pin and Frequency Timer ControlDocument6 pagesArduino Mega: PWM Pin and Frequency Timer Controlwan ismail ibrahimNo ratings yet
- DQ TransformationDocument51 pagesDQ Transformationwan ismail ibrahimNo ratings yet
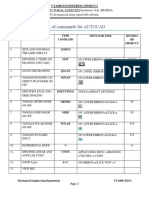
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 pagesList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNo ratings yet
- Tax Evasion PDFDocument34 pagesTax Evasion PDFCristinaZLNo ratings yet
- GATE 2014 Civil With AnswersDocument33 pagesGATE 2014 Civil With AnswersJaga NathNo ratings yet
- ProblemDocument2 pagesProblemJishnuNo ratings yet
- Bacp - Module 1 - Mini ProjectDocument25 pagesBacp - Module 1 - Mini ProjectPavithra ManjakuppamNo ratings yet
- How Many Interviews Are Enough - On Data SaturationDocument25 pagesHow Many Interviews Are Enough - On Data SaturationpanderetitaestudiaNo ratings yet
- Linear Algebra With Applications 9th Edition Leon Solutions ManualDocument32 pagesLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuNo ratings yet
- Programmable Logic ControllersDocument31 pagesProgrammable Logic Controllersgpz10100% (15)
- 34ee79a9746d853ef9fa1f44acc55afeDocument51 pages34ee79a9746d853ef9fa1f44acc55afeSai Pavan MarojuNo ratings yet
- 6 Confidence IntervalsDocument17 pages6 Confidence IntervalsLa JeNo ratings yet
- Axelrod SummaryDocument3 pagesAxelrod SummaryLuuk JanssenNo ratings yet
- Final UTS-1 PDFDocument3 pagesFinal UTS-1 PDFKritika Yadav100% (1)
- Second Order Hold Based Discretization Method ofDocument5 pagesSecond Order Hold Based Discretization Method ofvitinrjNo ratings yet
- Chap 1 A - PropositionsDocument44 pagesChap 1 A - Propositionsعمار الدلال100% (1)
- Computer Science 10th Class Chapter 01 Short Questions AnswersDocument7 pagesComputer Science 10th Class Chapter 01 Short Questions AnswersHamza Niaz100% (3)
- A New Versatile Electronic Speckle Pattern Interferometer For VibDocument318 pagesA New Versatile Electronic Speckle Pattern Interferometer For Vibssunil7432No ratings yet
- JFo - 3 - 4 ConvertDocument32 pagesJFo - 3 - 4 ConvertKaltuma OmarNo ratings yet
- AEE 23april 430to630pmDocument26 pagesAEE 23april 430to630pmShikha SoniNo ratings yet
- Research Process, Phases and 10 Step ModelDocument5 pagesResearch Process, Phases and 10 Step ModelJ.B ChoNo ratings yet
- Blended-Learning-Plan-Form (Mathematics 7)Document2 pagesBlended-Learning-Plan-Form (Mathematics 7)KarlzNo ratings yet
- DAA PPT DAA PPT by Dr. Preeti BailkeDocument21 pagesDAA PPT DAA PPT by Dr. Preeti BailkeKkNo ratings yet
- How To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisDocument8 pagesHow To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisgoyalmanojNo ratings yet
- SPACE BODY AND MOVEMENT Notes On The Res PDFDocument23 pagesSPACE BODY AND MOVEMENT Notes On The Res PDFMohammed Gism AllahNo ratings yet
- Trade-Off Strategies in Engineering DesignDocument27 pagesTrade-Off Strategies in Engineering DesignDan SantosNo ratings yet
- Exercise1 BDocument2 pagesExercise1 Bapi-3737025No ratings yet
- Aea Cookbook Econometrics Module 1Document117 pagesAea Cookbook Econometrics Module 1shadayenpNo ratings yet
- Optimum Design PrinciplesDocument3 pagesOptimum Design PrinciplesJen Chavez100% (1)
- Hydra 325 Laboratory Experiment No.1Document2 pagesHydra 325 Laboratory Experiment No.1lalguinaNo ratings yet
- Comparative Bio Mechanics of ThrowingsDocument25 pagesComparative Bio Mechanics of ThrowingsAttilio SacripantiNo ratings yet
- E & P Cycle in Petroleum Industry: A Question of Risk and UncertaintyDocument38 pagesE & P Cycle in Petroleum Industry: A Question of Risk and UncertaintyAdvait DeshmukhNo ratings yet