You might also like
- Esc201t l10 RC RL CircuitsDocument34 pagesEsc201t l10 RC RL CircuitsRachit MahajanNo ratings yet
- ESC201T L14 Phasor AnalysisDocument23 pagesESC201T L14 Phasor AnalysisRachit MahajanNo ratings yet
- EEE 209 Presentation 5 (1st and 2nd Order CCTS)Document88 pagesEEE 209 Presentation 5 (1st and 2nd Order CCTS)Mert YılmazNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- Ulaby Chapter 6 Lecture 3rd EditionDocument36 pagesUlaby Chapter 6 Lecture 3rd EditionSyed Ali Haider100% (1)
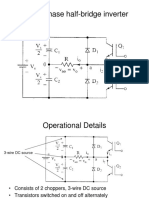
- Single Phase Half Bridge InverterDocument29 pagesSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Chapter 6 First Order Transient PDFDocument21 pagesChapter 6 First Order Transient PDFRindra RahmatullohNo ratings yet
- Special Topics in Power - 1Document38 pagesSpecial Topics in Power - 1Ravichandran SekarNo ratings yet
- 9 First-Order Circuits NotedDocument67 pages9 First-Order Circuits NotedBrandon CilNo ratings yet
- Natural and Step Response of Series andDocument71 pagesNatural and Step Response of Series andManar HosnyNo ratings yet
- 10 First-Order Circuits (Part 2) NotedDocument22 pages10 First-Order Circuits (Part 2) NotedBrandon CilNo ratings yet
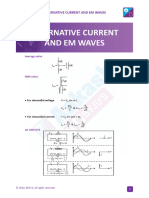
- Alternating Current - Revision Session-HandbookDocument4 pagesAlternating Current - Revision Session-Handbooklol344466No ratings yet
- Powersys 3Document39 pagesPowersys 3setsindia3735No ratings yet
- Powersys 4Document39 pagesPowersys 4setsindia3735No ratings yet
- DC Transient AnalysisDocument206 pagesDC Transient Analysisasanithanair35No ratings yet
- Time Domain Response of First Order RL and RC CircuitsDocument21 pagesTime Domain Response of First Order RL and RC CircuitsMOHSINALI MOMINNo ratings yet
- Ch07 First Order Circuits 16to9Document63 pagesCh07 First Order Circuits 16to9avishek aviNo ratings yet
- First Order and Second Order Response of RL and RC CircuitDocument126 pagesFirst Order and Second Order Response of RL and RC CircuitAnonymous 20Uv9c2No ratings yet
- Time Domain AnalysisDocument94 pagesTime Domain AnalysisAbhayNo ratings yet
- Networks Ppt2 SharedDocument22 pagesNetworks Ppt2 SharedAviral UpadhyayNo ratings yet
- Chapter 4 Part 2 EditDocument26 pagesChapter 4 Part 2 EditR Loghanyah M.RameshNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesgopalgeniusNo ratings yet
- ELL 100 Introduction To Electrical Engineering: L 12: T R S - O C (F R)Document45 pagesELL 100 Introduction To Electrical Engineering: L 12: T R S - O C (F R)conference RequirementsNo ratings yet
- BEE2 ChapterDocument30 pagesBEE2 ChapterpvpriyaNo ratings yet
- 1PH Half Bridge InverterDocument31 pages1PH Half Bridge InvertertintuvrNo ratings yet
- Half-Wave RectifierDocument21 pagesHalf-Wave RectifierMuhammad Anaz'sNo ratings yet
- Half-Wave Rectifier - VerstudDocument21 pagesHalf-Wave Rectifier - VerstudLIEW HUI FANG UNIMAPNo ratings yet
- Cosmic Circuits With SolutionsDocument11 pagesCosmic Circuits With SolutionsRaja SekharNo ratings yet
- Chapter 3 Part IDocument68 pagesChapter 3 Part IDaniel MengeshaNo ratings yet
- Esc201: Introducton To Electronics: Sinusoidal Steady State AnalysisDocument35 pagesEsc201: Introducton To Electronics: Sinusoidal Steady State Analysisash jayNo ratings yet
- Eeng 455 LectureDocument174 pagesEeng 455 Lectureezekielmuriithi34No ratings yet
- Transient 1st & 2nd OrderDocument122 pagesTransient 1st & 2nd OrderhibaNo ratings yet
- Mod 04 Source Free Series Parallel RLCDocument22 pagesMod 04 Source Free Series Parallel RLCVasu RamNo ratings yet
- Alternating Current RC Circuits: 1 ObjectivesDocument9 pagesAlternating Current RC Circuits: 1 ObjectivesRizwan AliNo ratings yet
- Alternating Current RL Circuits: 1 ObjectivesDocument7 pagesAlternating Current RL Circuits: 1 ObjectivesElliott M.No ratings yet
- Week 4aDocument39 pagesWeek 4aHari ReddyNo ratings yet
- First Order Circuit: - Capacitors and Inductors - RC and RL CircuitsDocument14 pagesFirst Order Circuit: - Capacitors and Inductors - RC and RL CircuitsNorhatini IbrahimNo ratings yet
- Chapter 7Document77 pagesChapter 7rizwanspirit11No ratings yet
- Transient Response of DC Circuits: V It e RDocument10 pagesTransient Response of DC Circuits: V It e RAnonymous yO7rcec6vuNo ratings yet
- Control Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical SystemsDocument67 pagesControl Theory I Lec. 4: Mathematical Modeling of Electrical & Electronic Systems & Mechanical Systemsdream breaker100% (1)
- Transient Analysis: Jaesung JangDocument22 pagesTransient Analysis: Jaesung JangShivang LowanshiNo ratings yet
- Chapter 2Document134 pagesChapter 2kmamkoaNo ratings yet
- Teoría de Mecanismos Tema 3. VibracionesDocument37 pagesTeoría de Mecanismos Tema 3. VibracionestxabiNo ratings yet
- RL TransientDocument35 pagesRL Transientkrish104411No ratings yet
- EENG441 Solved ProblemsDocument10 pagesEENG441 Solved ProblemsAdnan KutsiNo ratings yet
- Chapter 7 Response of First Order RL and RC CircuitsDocument29 pagesChapter 7 Response of First Order RL and RC CircuitsEng MazenNo ratings yet
- Ch07 STDDocument41 pagesCh07 STDMohsan BilalNo ratings yet
- R. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderDocument37 pagesR. W. Erickson: Department of Electrical, Computer, and Energy Engineering University of Colorado, BoulderVijay Kumar LoluguNo ratings yet
- Transient Excitation of First-Order CircuitsDocument39 pagesTransient Excitation of First-Order CircuitsAakash JainNo ratings yet
- Second Order SystemDocument16 pagesSecond Order SystemAbdelrahman SelimNo ratings yet
- 2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationDocument11 pages2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationGian Carlos Perea DiazNo ratings yet
- Chapter 8: Simple RC and RL CircuitsDocument39 pagesChapter 8: Simple RC and RL Circuitsdabs_orangejuiceNo ratings yet
- Engr228 Circuit AnalysisDocument20 pagesEngr228 Circuit Analysissayed Tamir janNo ratings yet
- Time Domain Circuit Analysis First Order and Second Order Response of RL and RC CircuitDocument12 pagesTime Domain Circuit Analysis First Order and Second Order Response of RL and RC CircuitROMIT RUNWALNo ratings yet
- IntroductionDocument11 pagesIntroductionCaio CezarNo ratings yet
- Mack Grady Fundamentals of Electric Power TAMU Relay Conf Tutorial 150331Document44 pagesMack Grady Fundamentals of Electric Power TAMU Relay Conf Tutorial 150331Lawiii KkkNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Smart Tig Ac DC 200p LusqtoffDocument34 pagesSmart Tig Ac DC 200p LusqtoffgarvipNo ratings yet
- How Directional Relays WorkDocument10 pagesHow Directional Relays WorkTamjid KabirNo ratings yet
- Litz Design PDFsDocument2 pagesLitz Design PDFsShri KulkarniNo ratings yet
- Chapter Three Operational AmplifierDocument38 pagesChapter Three Operational AmplifierLalisa RegassaNo ratings yet
- Acyaby / Acyaby-F: Low Voltage Power Cables (0.6/1 KV)Document2 pagesAcyaby / Acyaby-F: Low Voltage Power Cables (0.6/1 KV)Kanfra SolNo ratings yet
- 725EX DatasheetDocument2 pages725EX DatasheetJoao Victor BNo ratings yet
- NOM 003 SCFI 2014 Electrical Products Safety RequirementsDocument6 pagesNOM 003 SCFI 2014 Electrical Products Safety Requirements2357131270No ratings yet
- Non Destructive Testing and Evaluation (Ultrasonic-Testing-Level-2 (Set-3) ) Solved MCQsDocument8 pagesNon Destructive Testing and Evaluation (Ultrasonic-Testing-Level-2 (Set-3) ) Solved MCQspandab BkNo ratings yet
- Modulos de EntradaDocument4 pagesModulos de EntradaYury AlejandraNo ratings yet
- 104 - Section5 - Stepper RelayDocument18 pages104 - Section5 - Stepper RelayslchavanNo ratings yet
- Simulating A DC DC Boost Converter Using Matlab Part 2Document13 pagesSimulating A DC DC Boost Converter Using Matlab Part 2electrotehnica0% (2)
- Electronic Measurements and Instrumentation QBDocument38 pagesElectronic Measurements and Instrumentation QBSrilekha031No ratings yet
- Ext 2011 GBDocument122 pagesExt 2011 GBWilliam Dante Mescco SaireNo ratings yet
- Annexure - I SYLLABUS For Test (POST - Assistant Engineer/ Electrical), Now Re-Designated As Assistant Executive Engineer/ ElectricalDocument2 pagesAnnexure - I SYLLABUS For Test (POST - Assistant Engineer/ Electrical), Now Re-Designated As Assistant Executive Engineer/ ElectricalSowmyaNo ratings yet
- BK29 BetaDocument73 pagesBK29 BetaBruce A. PerreaultNo ratings yet
- Bosch Alternators and StartersDocument10 pagesBosch Alternators and Starterslongtrandang5867No ratings yet
- RL (Radio Link)Document7 pagesRL (Radio Link)Indria HanandiniNo ratings yet
- Electrical Installation Condition ReportDocument9 pagesElectrical Installation Condition ReportAlrx BennettNo ratings yet
- 1SEP620013R3000 zlbm3 3p m12Document3 pages1SEP620013R3000 zlbm3 3p m12אלירן סויסהNo ratings yet
- TOA Blitzortung REDDocument95 pagesTOA Blitzortung REDdexterisNo ratings yet
- Service Manual: Ewm RCDocument30 pagesService Manual: Ewm RCRiza AkbarNo ratings yet
- Installation: Residential/Light Commercial Generator SetsDocument64 pagesInstallation: Residential/Light Commercial Generator SetsJackNo ratings yet
- DC Micro Grid For Wind and Solar Power Integration: A Project ReportDocument58 pagesDC Micro Grid For Wind and Solar Power Integration: A Project ReportVinayaga ProjectinstituteNo ratings yet
- Plasma PhysicsDocument76 pagesPlasma PhysicsEsthefano Morales Campaña100% (1)
- 30 Years of Radionics (Kelly) PDFDocument6 pages30 Years of Radionics (Kelly) PDFevandrojsilvaNo ratings yet
- 17 Samss 007Document12 pages17 Samss 007Eagle SpiritNo ratings yet
- Elec 114Document7 pagesElec 114Egy SimbolonNo ratings yet
- 0 - MSDS ReportDocument29 pages0 - MSDS ReportSandhya YadavNo ratings yet
- E14F05P16 Twin DiplexerDocument4 pagesE14F05P16 Twin DiplexerRomina Vargas ZuritaNo ratings yet
- Automatic Security Lights With PICAXEDocument3 pagesAutomatic Security Lights With PICAXEEduardo MoyaNo ratings yet