You might also like
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Cisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3From EverandCisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3No ratings yet
- Arduino Servo MotorDocument16 pagesArduino Servo MotorJirapong Manit100% (1)
- Multiservo Shield 1.1. FeaturesDocument7 pagesMultiservo Shield 1.1. FeaturesJay MenonNo ratings yet
- Gyro Camera For Motorcycle Using ArduinoDocument8 pagesGyro Camera For Motorcycle Using ArduinoCUIDAITONo ratings yet
- Arduino Clinic 2Document24 pagesArduino Clinic 2Benjamin Dover100% (1)
- 03 MotorsDocument41 pages03 MotorsahmetakdoganNo ratings yet
- Arduino Sanitizer Dispenser (Tinker Cad) : InstructablesDocument4 pagesArduino Sanitizer Dispenser (Tinker Cad) : InstructablesANISAH MOHAMAD NORDINNo ratings yet
- Servo Motor Control With An ArduinoDocument8 pagesServo Motor Control With An Arduinokedar nannikarNo ratings yet
- Electronic 11111Document5 pagesElectronic 11111Kimberly Mae AsisNo ratings yet
- Servo Library: CircuitDocument3 pagesServo Library: CircuitCosmin LookNo ratings yet
- ROBOTICS Lab ManualDocument7 pagesROBOTICS Lab Manualparidhi kaushikNo ratings yet
- Chapter 05 How To Control Servo Motor Using PythonDocument5 pagesChapter 05 How To Control Servo Motor Using Python0xbitNo ratings yet
- Programming: Obstacle Avoidance-ReferenceDocument10 pagesProgramming: Obstacle Avoidance-ReferenceBobby Ramos BadongenNo ratings yet
- Arduino: Servo Motors Diagrams & Code: Project 01: SweepDocument11 pagesArduino: Servo Motors Diagrams & Code: Project 01: Sweepkevin15No ratings yet
- Adafruit Arduino Lesson 14 Servo Motors - En.idDocument14 pagesAdafruit Arduino Lesson 14 Servo Motors - En.idHabibul ChairNo ratings yet
- Project 8 Servo MotorsDocument4 pagesProject 8 Servo MotorsDarwin VargasNo ratings yet
- Belga FlapGaugeV3Document16 pagesBelga FlapGaugeV3Giuliano LuzNo ratings yet
- Hexapod Master Slave CommunicationDocument22 pagesHexapod Master Slave CommunicationDigvijay MaheshwariNo ratings yet
- CPEN 100 Laboratory No. 4Document8 pagesCPEN 100 Laboratory No. 4Jiever AustriaNo ratings yet
- This Is The Updated Code Including The Stepper Motor DriveDocument559 pagesThis Is The Updated Code Including The Stepper Motor DrivesanthoshNo ratings yet
- Lecture 08 Experiment-12Document11 pagesLecture 08 Experiment-12linn.pa.pa.khaing.2020.2021.fbNo ratings yet
- Controler PDFDocument15 pagesControler PDFKhoiril HudaNo ratings yet
- The University of Faisalabad: Experiment No.10Document5 pagesThe University of Faisalabad: Experiment No.10Arbab AslamNo ratings yet
- Arduino Robot Arm TFCDDocument10 pagesArduino Robot Arm TFCDNelson MendivelsoNo ratings yet
- Servo MotorDocument37 pagesServo MotorKartik DaveNo ratings yet
- Chapter 1 Challenges: The Arduino ModuleDocument7 pagesChapter 1 Challenges: The Arduino Moduleapi-357698220No ratings yet
- Project 10 MOTION ALARMDocument6 pagesProject 10 MOTION ALARMDarwin VargasNo ratings yet
- Mikrokontroller ArduinorariefDocument101 pagesMikrokontroller ArduinorariefDio Izqhaq Risky SasongkoNo ratings yet
- 9G Servo ModDocument4 pages9G Servo Modthamer al-salekNo ratings yet
- Csed LabDocument83 pagesCsed LabÈshâñ ÇháddâNo ratings yet
- Programming With ArduinoDocument74 pagesProgramming With ArduinoGURSIMRAN SINGHNo ratings yet
- Practical 34: Aim: Demonstrate Servo Motor Sensor Using Arduino Code. RequirementsDocument2 pagesPractical 34: Aim: Demonstrate Servo Motor Sensor Using Arduino Code. RequirementsmohammadNo ratings yet
- Class 4 Servo MotorDocument20 pagesClass 4 Servo MotorInes99No ratings yet
- NIOS II ProcessorDocument28 pagesNIOS II ProcessorsubashvlsiNo ratings yet
- Guia Motor EsDocument26 pagesGuia Motor EsrenatocuevasanchezNo ratings yet
- My Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArrayDocument4 pagesMy Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArraySadiq AhmadNo ratings yet
- Laboratory Exercise 8 - Servo Motor: A. MaterialsDocument4 pagesLaboratory Exercise 8 - Servo Motor: A. MaterialsKeen Gementiza CabalseNo ratings yet
- Cabalse - Keen LE8 NocodeDocument3 pagesCabalse - Keen LE8 NocodeKeen Gementiza CabalseNo ratings yet
- Programming With Arduino: Course URL: Uggy/homeDocument74 pagesProgramming With Arduino: Course URL: Uggy/homeAstha AggarwalNo ratings yet
- Arduino Tinker CAD Smart Dustbin: InstructablesDocument4 pagesArduino Tinker CAD Smart Dustbin: InstructablesSejal ZadeNo ratings yet
- 2 Axis Gimbal Brushless With l298nDocument9 pages2 Axis Gimbal Brushless With l298nMano OhanianNo ratings yet
- Chapter 1 Challenges: QuestionsDocument6 pagesChapter 1 Challenges: Questionsapi-358354056No ratings yet
- Ir Proximity Sensor: Purpose & Overview of This ProjectDocument11 pagesIr Proximity Sensor: Purpose & Overview of This ProjectKirti GuptaNo ratings yet
- Multiplication of 2 NoDocument4 pagesMultiplication of 2 NosridharparthipanNo ratings yet
- Arduino CameraDocument7 pagesArduino CameraIfan IfanNo ratings yet
- Integration of Sensors and Actuators With Arduino-: Dr. Sudip MisraDocument14 pagesIntegration of Sensors and Actuators With Arduino-: Dr. Sudip MisraKumar Prabhakaran SNo ratings yet
- Clone A Remote With ArduinoDocument10 pagesClone A Remote With Arduinodeath914No ratings yet
- METRICA =256 (10^7/ (𝑀𝑖𝑛 𝐵𝑊 (𝐾𝑏𝑝𝑠) ) + ("Σ " 𝐷𝑒𝑙𝑎𝑦 (𝑢𝑠𝑒𝑐) ) /10) = 256 (10^7/1544𝐾b𝑝s+ 40000/10) = 2681856Document3 pagesMETRICA =256 (10^7/ (𝑀𝑖𝑛 𝐵𝑊 (𝐾𝑏𝑝𝑠) ) + ("Σ " 𝐷𝑒𝑙𝑎𝑦 (𝑢𝑠𝑒𝑐) ) /10) = 256 (10^7/1544𝐾b𝑝s+ 40000/10) = 2681856Miguek A GarridoNo ratings yet
- Lesson 2 Obstacle Avoidance CarDocument13 pagesLesson 2 Obstacle Avoidance CarSWNo ratings yet
- Arduino Playground - OSW041Document7 pagesArduino Playground - OSW041Juancho RANo ratings yet
- Arduino Control Car V2 byDocument4 pagesArduino Control Car V2 byMikaela E Ramírez HerreraNo ratings yet
- Ecen90 Robot Arle HernandezDocument12 pagesEcen90 Robot Arle HernandezCenon Lumabad IIINo ratings yet
- Sonar With Arduino, C#, JavaScript and HTML5Document3 pagesSonar With Arduino, C#, JavaScript and HTML5carlyblack2006No ratings yet
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocument15 pagesSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- Examples of All Dynagen Network File OptionsDocument7 pagesExamples of All Dynagen Network File Optionsأحمد مروانNo ratings yet
- Iot Hardware and Software: Prof. Sourabh Bhaskar, Assistant ProfessorDocument16 pagesIot Hardware and Software: Prof. Sourabh Bhaskar, Assistant ProfessorVIJAY KUAMRNo ratings yet
- Build Your Own Quadcopter Flight ControllerDocument13 pagesBuild Your Own Quadcopter Flight ControlleraphongdoNo ratings yet
- SmoothK40 Guide - Smoothie ProjectDocument1 pageSmoothK40 Guide - Smoothie ProjectJhwazkdNo ratings yet
- Chapter1 2challengesDocument10 pagesChapter1 2challengesapi-358351745No ratings yet
- Part 1 Standard Testing of Elastomer RubberDocument68 pagesPart 1 Standard Testing of Elastomer RubberNabyendu Fossils SenNo ratings yet
- Strategic Planning TemplateDocument1 pageStrategic Planning TemplateShukri FaezNo ratings yet
- Professional Conduct QuestionDocument2 pagesProfessional Conduct QuestionRazi Haziq100% (6)
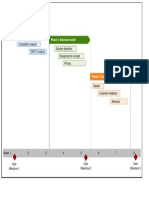
- Phase 1: Opportunity Assessment: Define VisionDocument2 pagesPhase 1: Opportunity Assessment: Define VisionShukri FaezNo ratings yet
- D11 IndustryReferenceMaterialsDocument2 pagesD11 IndustryReferenceMaterialsShukri FaezNo ratings yet
- Assignment 1 Project Management Sources: 1. 2. 3. 4. Pecah Tanah 5. 6Document1 pageAssignment 1 Project Management Sources: 1. 2. 3. 4. Pecah Tanah 5. 6Shukri FaezNo ratings yet
- Business Model Canvas: Key Partners Key Activities Value Propositions Customer Relationships Customer SegmentsDocument1 pageBusiness Model Canvas: Key Partners Key Activities Value Propositions Customer Relationships Customer SegmentsShukri FaezNo ratings yet
- Project Plan GantDocument1 pageProject Plan GantShukri FaezNo ratings yet
- Recycle RubberDocument8 pagesRecycle RubberShukri FaezNo ratings yet
- Materials: Time-Variant Reliability Analysis For Rubber O-Ring Seal Considering Both Material Degradation and Random LoadDocument18 pagesMaterials: Time-Variant Reliability Analysis For Rubber O-Ring Seal Considering Both Material Degradation and Random LoadShukri FaezNo ratings yet
- What Is The Role of Zinc Oxide in Rubber Formulations - Nanjing Union Rubber ChemicalsDocument3 pagesWhat Is The Role of Zinc Oxide in Rubber Formulations - Nanjing Union Rubber ChemicalsShukri FaezNo ratings yet
- Evaluation On High-Pressure Hydrogen Decompression Failure of Rubber O-Ring Using Design of ExperimentsDocument7 pagesEvaluation On High-Pressure Hydrogen Decompression Failure of Rubber O-Ring Using Design of ExperimentsShukri FaezNo ratings yet
- Recycling RubberDocument8 pagesRecycling RubberJean Rechell Frias SultanNo ratings yet
- Table ReviewDocument1 pageTable ReviewShukri FaezNo ratings yet
- RFID Source CodeDocument22 pagesRFID Source CodeShukri FaezNo ratings yet
- ETechnicalNote Antioxidants Dec2010 PDFDocument44 pagesETechnicalNote Antioxidants Dec2010 PDFsumitNo ratings yet
- Professional Conduct QuestionDocument2 pagesProfessional Conduct QuestionRazi Haziq100% (6)
- TestDocument3 pagesTestShukri FaezNo ratings yet
- An Analysis On Safety Work Culture in Malaysian Manufacturing IndustryDocument5 pagesAn Analysis On Safety Work Culture in Malaysian Manufacturing IndustryShukri FaezNo ratings yet
- Ewc Previous StudyDocument2 pagesEwc Previous StudyShukri FaezNo ratings yet
- GanttDocument8 pagesGanttShukri FaezNo ratings yet
- RFID Source CodeDocument22 pagesRFID Source CodeShukri FaezNo ratings yet
- Gantt Chart LDocument8 pagesGantt Chart LAshok PuttaparthyNo ratings yet
- Stearing SystemDocument1 pageStearing SystemShukri FaezNo ratings yet
- Product Design SpecificationDocument1 pageProduct Design SpecificationShukri FaezNo ratings yet
- Muhamad Shukri Faez: Assignment A XDocument1 pageMuhamad Shukri Faez: Assignment A XShukri FaezNo ratings yet
- Product Design SpecificationDocument7 pagesProduct Design SpecificationShukri FaezNo ratings yet
- ChassisDocument15 pagesChassisShukri FaezNo ratings yet
- REFERENCEDocument1 pageREFERENCEShukri FaezNo ratings yet
- MMW NotesDocument3 pagesMMW NotesCharlene Torrid AmaquinNo ratings yet
- Abap Sap 101 - Beginners - 2 - 04 - (PDF Document)Document4 pagesAbap Sap 101 - Beginners - 2 - 04 - (PDF Document)Kanigiri NareshNo ratings yet
- Tiruchendurmurugan - Hrce.tn - Gov.in Ticketing Reports e Acknowledgement View - PHP Transid 20240131103116000190Document2 pagesTiruchendurmurugan - Hrce.tn - Gov.in Ticketing Reports e Acknowledgement View - PHP Transid 20240131103116000190vadivoo.1967No ratings yet
- Ibm 3592 Tape Cartridge CatalogueDocument4 pagesIbm 3592 Tape Cartridge CatalogueamsfibNo ratings yet
- PSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)Document8 pagesPSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)luism_falconiNo ratings yet
- PROJECTDocument34 pagesPROJECTBiswajit PaulNo ratings yet
- TCPIP Lecture16Document115 pagesTCPIP Lecture16Tuan BeoNo ratings yet
- Kozinets Gretzel 2020 Commentary Artificial Intelligence The Marketer S DilemmaDocument4 pagesKozinets Gretzel 2020 Commentary Artificial Intelligence The Marketer S DilemmalionelfamNo ratings yet
- IoT Based Solar Energy Monitoring SystemDocument5 pagesIoT Based Solar Energy Monitoring SystemhatomiNo ratings yet
- Traktor Signatures Set-Up DubfireDocument1 pageTraktor Signatures Set-Up DubfireAndres Fernando Rodriguez JaramilloNo ratings yet
- Software Quality Assurance TestingDocument11 pagesSoftware Quality Assurance Testingriaz ahamedNo ratings yet
- Sat 2004 Maths QuestionsDocument3 pagesSat 2004 Maths QuestionsSai Sumanth PNo ratings yet
- Config Cisco 881 Isla PartidaDocument4 pagesConfig Cisco 881 Isla PartidaJohan Frederick FoitzickNo ratings yet
- NS2 Lab2Document11 pagesNS2 Lab2Tech Talk Paper PresentationNo ratings yet
- Philippine Auditing Practices Statements (PAPS) 1009 Computer Assisted Audit TechniquesDocument9 pagesPhilippine Auditing Practices Statements (PAPS) 1009 Computer Assisted Audit Techniqueserjan nina bombayNo ratings yet
- 컴퓨터 키보드의 한글배열 연구Document86 pages컴퓨터 키보드의 한글배열 연구Marizouh23No ratings yet
- Toastmasters 430A Online Meeting Tips PDFDocument3 pagesToastmasters 430A Online Meeting Tips PDFHrishikesh ChavanNo ratings yet
- C BasicsDocument92 pagesC BasicsjavedNo ratings yet
- Math PyqDocument4 pagesMath Pyqsangwan2503banitaNo ratings yet
- Examples E Solara Type1 and 2 01Document15 pagesExamples E Solara Type1 and 2 01kaibouNo ratings yet
- XDKDocument584 pagesXDKreksab_16No ratings yet
- Kyo 32Document28 pagesKyo 32Kulik AndreiNo ratings yet
- Akash Updated ResumeDocument3 pagesAkash Updated ResumeAkash PatilNo ratings yet
- 04 Activity 1 - PLATTECHDocument2 pages04 Activity 1 - PLATTECHMarc GonzalesNo ratings yet
- Java Course Content Updated - WinPath ITDocument5 pagesJava Course Content Updated - WinPath ITSridhar SNo ratings yet
- Sad PresentationDocument22 pagesSad PresentationManna ManniNo ratings yet
- FST DFS Gardner DenverDocument4 pagesFST DFS Gardner DenverEric DunnNo ratings yet
- Citing Images in APA FormatDocument4 pagesCiting Images in APA FormatUniversal CollabNo ratings yet
- Learning Module Chs Grade 10Document374 pagesLearning Module Chs Grade 10Christine Mercede71% (38)