You might also like
- Elementos Básicos de La CinemáticaDocument9 pagesElementos Básicos de La CinemáticasergioabelramirezzapNo ratings yet
- Velocímetro Con MPU6050Document25 pagesVelocímetro Con MPU6050Hector FloresNo ratings yet
- Movimiento Rectilíneo UniformeDocument7 pagesMovimiento Rectilíneo UniformeJean MartínezNo ratings yet
- Movimiento Rectilíneo UniformeDocument19 pagesMovimiento Rectilíneo Uniformeangelsantiagocamachobautista17No ratings yet
- Movimiento RectilineoDocument4 pagesMovimiento RectilineoAnthony RodriiguezNo ratings yet
- Movimiento Rectilíneo Uniforme Fisica de Tercer AñoDocument20 pagesMovimiento Rectilíneo Uniforme Fisica de Tercer Añoluis carrascoNo ratings yet
- Documento 14Document3 pagesDocumento 14Eduardoelias Robles cruzNo ratings yet
- Parte Practica 2-Informe LabDocument6 pagesParte Practica 2-Informe Label cotorro 25934No ratings yet
- Movimiento Rectilíneo UniformeDocument12 pagesMovimiento Rectilíneo UniformeNoemi Cabrera HuanacuniNo ratings yet
- Trabajo Fisica 02.Document7 pagesTrabajo Fisica 02.Leonelys FuentesNo ratings yet
- Reporte3 - Mécanica Clásica ESIQIEDocument31 pagesReporte3 - Mécanica Clásica ESIQIEhernandez.guerrero.luisfNo ratings yet
- Movimiento Rectilíneo UniformeDocument3 pagesMovimiento Rectilíneo UniformeSami PatiñoNo ratings yet
- Movimiento Rectilineo UniformeDocument2 pagesMovimiento Rectilineo UniformeValeriaCuestas100% (1)
- La cinemática (del griego κινέιν kinéin 'moverDocument9 pagesLa cinemática (del griego κινέιν kinéin 'moverÂndy GarcîaNo ratings yet
- MRV y MruvDocument11 pagesMRV y MruvJose Trujillo CcanahuireNo ratings yet
- 2018 1.-Conceptos Basicos de CinematicaDocument21 pages2018 1.-Conceptos Basicos de CinematicaAbigael Sampallo CarballoNo ratings yet
- Movimiento UniformeDocument2 pagesMovimiento UniformedianaNo ratings yet
- Movimiento Uniformemente AceleradoDocument17 pagesMovimiento Uniformemente Aceleradogreykol sanche zimanNo ratings yet
- Cinemática ClásicaDocument9 pagesCinemática Clásicacapricornio1172No ratings yet
- Movimiento Rectilineo UniformeDocument3 pagesMovimiento Rectilineo UniformeAnahiNo ratings yet
- Movimiento Rectilíneo Uniforme - Wikipedia, La Enciclopedia LibreDocument7 pagesMovimiento Rectilíneo Uniforme - Wikipedia, La Enciclopedia Libredavidgenaro69No ratings yet
- Movimiento Rectilíneo UniformeDocument4 pagesMovimiento Rectilíneo UniformejorgeNo ratings yet
- Clase 1 - DinámicaDocument27 pagesClase 1 - DinámicaJEAnimations FoxNo ratings yet
- Unidad 1 RossyDocument16 pagesUnidad 1 RossyjesusNo ratings yet
- Imforme de MRUDocument29 pagesImforme de MRUAnonymous SoSMFtINo ratings yet
- Cinematica InicialDocument24 pagesCinematica InicialFausto GamboaNo ratings yet
- Tarea 1 de CinematicaDocument9 pagesTarea 1 de CinematicakellinetwNo ratings yet
- FisicaDocument5 pagesFisicaSORIANO SÁNCHEZ ESTEFANY GUADALUPENo ratings yet
- Física GeneralDocument72 pagesFísica GeneralJenniffer Zambrano100% (4)
- Cinemática: Representación de La de Una Partícula (Verde), Mostrando La (Azul) en Un Momento Dado de Dicha TrayectoriaDocument10 pagesCinemática: Representación de La de Una Partícula (Verde), Mostrando La (Azul) en Un Momento Dado de Dicha TrayectoriaAMAURY LOPEZ JIMENEZNo ratings yet
- Fisica CinematicaDocument7 pagesFisica Cinematicacaysi gomezNo ratings yet
- Movimiento Rectilineo UniformeDocument15 pagesMovimiento Rectilineo UniformeRafael TovarNo ratings yet
- Movimiento AceleradoDocument18 pagesMovimiento AceleradoErick GonzalezNo ratings yet
- Quimica Clase 3Document7 pagesQuimica Clase 3KURY ALONDRA JIMENEZ LOZANONo ratings yet
- MovimientoDocument8 pagesMovimientoLaura Ruiz BNo ratings yet
- CONCEPTOSDocument7 pagesCONCEPTOSRoberto Leyva vazquezNo ratings yet
- La Cinemática Fisica EstuediantesDocument13 pagesLa Cinemática Fisica EstuediantesGuillermo Rodriguez GodoyNo ratings yet
- DilanDocument9 pagesDilanMichell GomezNo ratings yet
- Informe Movimiento RectilineoDocument4 pagesInforme Movimiento RectilineoWilliam OrtizNo ratings yet
- Física Unidad 2Document17 pagesFísica Unidad 2Alondra OlveraNo ratings yet
- Trabjo Numero 1 de FisicaDocument17 pagesTrabjo Numero 1 de FisicaEliezer CardozoNo ratings yet
- Mru y MuvDocument7 pagesMru y MuvDanielaNo ratings yet
- U4a1 Garciage PDFDocument17 pagesU4a1 Garciage PDFRey Esteban MisterioNo ratings yet
- Tarea 2 Fisica BasicaDocument7 pagesTarea 2 Fisica BasicaIssa Rivera100% (1)
- Informe Practica 5Document13 pagesInforme Practica 5Liseth YulianaNo ratings yet
- CinemáticaDocument15 pagesCinemáticaLeonardo GutierrezNo ratings yet
- Mecanica Clasica GuiaDocument14 pagesMecanica Clasica Guiamaria juliana zuluaga jmenezNo ratings yet
- CinematicaDocument9 pagesCinematicaMeylin SilvaNo ratings yet
- Tarea 3Document16 pagesTarea 3Andres VillanuevaNo ratings yet
- CinemáticaDocument3 pagesCinemáticaMario PachecoNo ratings yet
- Magnitudes Escalares y VectorialesDocument28 pagesMagnitudes Escalares y Vectorialesleonardo santamaria guerreroNo ratings yet
- La CinemáticaDocument16 pagesLa CinemáticaWENCESNo ratings yet
- Magnitudes Escalares y VectorialesDocument29 pagesMagnitudes Escalares y Vectorialesleonardo santamaria guerreroNo ratings yet
- Movimiento en Física Clases de Movimiento Acelerado UniformeDocument4 pagesMovimiento en Física Clases de Movimiento Acelerado UniformeCyberPlus Cafe InternetNo ratings yet
- Lab #3 Riveros Belito Mishel Smith 2205-ApiDocument13 pagesLab #3 Riveros Belito Mishel Smith 2205-ApiMISHEL SMITH RIVEROS BELITONo ratings yet
- Fisica I - Cinemática (A1) PruebaDocument40 pagesFisica I - Cinemática (A1) PruebaNajhely AlvinoNo ratings yet
- Informe 4Document24 pagesInforme 4Thalia Herrera DominguezNo ratings yet
- Unidad Nâ° 1 - Cinematica - 2022Document126 pagesUnidad Nâ° 1 - Cinematica - 2022ainara.brizuela67No ratings yet
- Vector EsDocument15 pagesVector EsTonalli GaonaNo ratings yet
- IntroduccionDocument5 pagesIntroduccionOswaldo Cuatecontzi TlilayatziNo ratings yet
- 10 de Mayo de 1963 Haber HenaoDocument2 pages10 de Mayo de 1963 Haber HenaoJordis Villa AragonNo ratings yet
- Guion de IntegralesDocument1 pageGuion de IntegralesJordis Villa AragonNo ratings yet
- Trabajo GrupalDocument14 pagesTrabajo GrupalJordis Villa AragonNo ratings yet
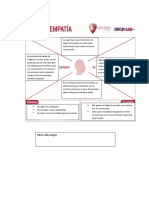
- Mapa de EmpatiaDocument1 pageMapa de EmpatiaJordis Villa AragonNo ratings yet
- Producto CartesianoDocument7 pagesProducto CartesianoJordis Villa AragonNo ratings yet
- Hacer Calculo de La Tabla de Multiplicar Trabajo # 1Document3 pagesHacer Calculo de La Tabla de Multiplicar Trabajo # 1Jordis Villa AragonNo ratings yet
- Tamas de La RubricaDocument3 pagesTamas de La RubricaJordis Villa AragonNo ratings yet
- Mapa Conceptual CinemáticaDocument4 pagesMapa Conceptual CinemáticaFeria WilliamNo ratings yet
- Problemas Resueltos de Mecánica de Fluidos (Schaum) - José María López - 1ra EdiciónDocument335 pagesProblemas Resueltos de Mecánica de Fluidos (Schaum) - José María López - 1ra Ediciónkathyto80% (5)
- Desplazamiento (Vector)Document2 pagesDesplazamiento (Vector)Lenin Benavides SalazarNo ratings yet
- Apunte TensoresDocument11 pagesApunte TensoresPoly GonzalezNo ratings yet
- Movimiento Rectilino UniformeDocument4 pagesMovimiento Rectilino UniformeNineth Del CidNo ratings yet
- Cuestionario Fisica ModernaDocument4 pagesCuestionario Fisica ModernaYonatan MayVeNo ratings yet
- Cap3 FisicaDocument30 pagesCap3 FisicaAlCapone ChecoNo ratings yet
- Transcripción de Rotación MatlabDocument19 pagesTranscripción de Rotación MatlabVerenisse Mishel CalleNo ratings yet
- Desplazamientos MecánicosDocument4 pagesDesplazamientos MecánicosEnrique TopeteNo ratings yet
- Mat5 U9 Sesion 11Document13 pagesMat5 U9 Sesion 11jorgeropon9390No ratings yet
- Movimiento Rectilineo de ParticulasDocument4 pagesMovimiento Rectilineo de Particulaselkmaleon100% (3)
- Fisica BasicaDocument21 pagesFisica BasicaJames Huaman GuzmanNo ratings yet
- PCA 2016 Fisica 1 BguDocument9 pagesPCA 2016 Fisica 1 Bguhemelendez100No ratings yet
- Geometria SimplecticaDocument40 pagesGeometria SimplecticanayibeNo ratings yet
- Practica 3 Caida LibreDocument9 pagesPractica 3 Caida LibreNicolás CoelloNo ratings yet
- Polar EsDocument3 pagesPolar EsComunidad RawNo ratings yet
- Desarrollo de Programa de MecanismosDocument132 pagesDesarrollo de Programa de Mecanismosgladyssgtz0% (3)
- Las Fuerzas y Sus EfectosDocument43 pagesLas Fuerzas y Sus EfectosLuis ChadiNo ratings yet
- Capitulo12 PDFDocument104 pagesCapitulo12 PDFErika TorresNo ratings yet
- Momentos de InerciaDocument13 pagesMomentos de InerciaEdelvio Castillo LoayzaNo ratings yet
- Fisica Solucionario Libro de Profesor 2º Bachillerato Edtorial AnayaDocument518 pagesFisica Solucionario Libro de Profesor 2º Bachillerato Edtorial AnayarogerchapiNo ratings yet
- Analisis de Posicion de EslabonamientosDocument15 pagesAnalisis de Posicion de EslabonamientosLuis Paladines BravoNo ratings yet
- Guia1 1Document11 pagesGuia1 1Maria VeraNo ratings yet
- Carpeta de MecanicaDocument5 pagesCarpeta de MecanicaSebastian MartinezNo ratings yet
- 02 Máquinas, Mecanismos y GDLDocument32 pages02 Máquinas, Mecanismos y GDLPaul TtaccaNo ratings yet
- Dinamica de Particulas-AyalaDocument18 pagesDinamica de Particulas-AyalaSarIcoCanchariNo ratings yet
- Normas para Dibujo TecnicoDocument17 pagesNormas para Dibujo TecnicoJoglupeNo ratings yet
- Caracteristicas de Las NecesidadesDocument14 pagesCaracteristicas de Las NecesidadesAnonymous d5RhQmo6No ratings yet
- Asignación CinemáticaDocument12 pagesAsignación CinemáticaXavier Pacheco PaulinoNo ratings yet