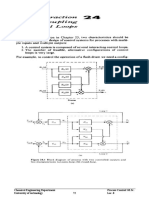
Dynamic Behaviour of Feedback Controlled Process
Overall transfer function of a closed- loop control system:
d(s) Gd
Comparator
ysp E(s) C(s) m(s) y(s)
GC Gf Gp
Controller Final control Process
element
ym(s) y (s)
Gm
Process balance
y(s) G p m( s) Gd d ( s) Measuring Device
Measuring device
y m ( s ) Gm y ( s )
Controller system
E ( s) ysp ( s) ym ( s) Comparator
C ( s ) Gc E ( s ) Controller
Final control element
m( s) G f C ( s)
Algebra manipulation of the above equations and arrange then
y( s) G p m( s) Gd d ( s)
y( s) G p G f C ( s) Gd d ( s)
y( s) G p G f Gc E ( s) Gd d ( s)
y( s) G p G f Gc ( ysp ( s) ym ( s)) Gd d ( s)
y(s) G p G f Gc ( ysp ( s) Gm y(s)) Gd d (s)
y(s) G p G f Gc ysp ( s) G p G f GcGm y( s) Gd d ( s)
(1 Gc G f G pGm ) y( s) Gc G f Gp ysp (s) Gd d (s)
Gc G f G p Gd
y(s) ySP ( s ) d (s)
1 Gc G f G p Gm 1 Gc G f G p Gm
Let G = GC Gf GP
G Gd
y ( s) ySP ( s) d ( s)
1 GGm 1 GGm
G Gd
GSP Gload
1 GGm 1 GGm
Process Control /Lec. 8 93 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
Types of control proplems:
1) Servo systems:
The distubance does not change (i.e. d (s) = 0 ) while the set point undergoes change.
The feedback controller act in such away as to keep y close to the changing y sp . The
T.F. of closed loop system of this type is:
G p G f Gc
y ( s) ySP ( s )
1 Gc G f G p Gm
2) Regulated systems:
In these systems the set point (desired value) is constant ( ysp (s) = 0 ) and the change
occurring in the load. The T.F. of closed loop control system of this type is:
Gd
y ( s) d ( s)
1 Gc G f G p Gm
y(s) Gload d (s)
The feedback controller tries to eliminate the impact of the load change d to keep y at
the desired setpoint.
Effect of controllers on the response of a controlled process:
(1) Effect of Propertional Control
The general T.F of the closed loop controller is:
Gc G f G p Gd
y ( s) ySP ( s ) d ( s) (*)
1 Gc G f G p Gm 1 Gc G f G p Gm
Consider Gm 1 , G f 1
Also for propertional controller GC K C
And eqn. (*) becomes
Kc G p Gd
y ( s) ySP ( s ) d ( s) (**)
1 Kc G p 1 Kc G p
For a first order systems
dy
p y K p m Kd d
dt
Which gives
Kp Kd
y ( s) m (s) d ( s)
ps 1 ps 1
Process Control /Lec. 8 94 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
Thus for the uncontrolled system we have time constant= τp
Static gains: Kp for manipolation and Kd for load
Kp Kd
put G p and Gd
ps 1 ps 1
Then by substitution in eqn. (**) and take the closed loop reponse as
Kp Kd
Kc
ps 1 ps 1
y( s ) ySP ( s ) d( s )
Kp Kp
1 Kc 1 Kc
ps 1 ps 1
K P KC Kd 1 K p KC
y ( s) [ ySP ( s ) d ( s )]
p s 1 K p KC p s 1 K p KC 1 K p KC
K P KC Kd
1 K p KC 1 K p KC
y (s) ySP ( s ) d (s)
ps 1 K p KC ps 1 K p KC
1 K p KC 1 K p KC 1 K p KC 1 K p KC
Rearrange the last eqn.
KP Kd
y ( s) ySP ( s) d ( s)
ps 1 ps 1
Where
P
p Closed loop time constant
1 K p KC
K p KC
Kp Closed loop ststic gain
1 K p KC
Kd
Kd Closed loop ststic gain
1 K p KC
The close-loop response has the follwing charactrstics:-
1- It remains first order with respect to load and setpoint change
2- The time constant has been reduced ( p P ) which mean that the closed-loop
response has become faster than the open loop response, to change in set point
or load.
3- The static gain have been decreased.
Disadvantage of Propertional control
Consider a servo problem with a unit step in the set point
1
ysp d ( s) 0
s
Process Control /Lec. 8 95 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
Kp 1
y
ps 1 s
t / p
y( t ) K p ( 1 e )
y() K p
The ultimate response of t never reaches the desired new setpoint. There is
always a discrepancy called offset which is equal to:
Offset = New set point - Ultimate value
K p KC
=1 K p 1
1 K p KC
1
offset
1 K p KC
Offset decreases as KC becomes larger an thoretically offset 0 when KC
1
ysp(t) 𝑜𝑓𝑓𝑠𝑒𝑡 =
1+𝐾𝑃 𝐾𝐶
1
y(t)
0
2- Effect of Integral Control
Consider a servo problem, d ( s) 0
Gc G f G p
y ( s) y SP ( s ) (*)
1 Gc G f G p Gm
Consider Gm G f 1
kp
For the 1st order process G p
ps 1
For a simple integral control
1
Gc K c
Is
Sub in eqn. (*)
KP K
C
ps 1 I s K P KC
y( s ) ySP ( s ) ySP ( s )
1
KP
KC ( p s 1 )( I s ) K P K C
ps 1 I s
Process Control /Lec. 8 96 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
K P KC
K P KC
y( s ) ySP ( s )
p I s 2 Is K P KC
K P KC K P KC K P KC
1
y ( s) 2 2 y SP ( s) (**)
s 2 s 1
Where
I p 1 I
K p Kc 2 p K p Kc
Eqn. (**) indicates an important effect of the integral control action:-
1- It increases the order of the dynamic for the closed-loop reponse.
Thus for a first-order uncontrolled process, the response of the closed-loop
becomes second order.
2- Increase K C decreases more oscillatory
3- To examine the effect of integral on s.s error
1
y ( s) 2 2 y SP ( s)
s 2 s 1
1
If y SP ( s)
s
The ultimate value= AK=1*1=1
offset= New setpoint-ultimate value
=1-1=0
It indicate that the integral control eliminates any offset
3- Effect of Derivative Control Action
For derivative control
Gc K c D s
KP
K s
ps 1 c D K P K c D s
y( s ) ySP ( s ) ySP ( s )
1
KP
K s p s 1 K K
P c D s
ps 1 c D
K P K c D s
y ( s) ySP ( s) (*)
( p K p K c D ) s 1
Eqn. (*) indicates that:-
1- The derivative control does not change the order of the reponse.
2- The effective time constant of the closed-loop response ( p K p KC D p )
This means that the response of the controlled process is slower than that of the
original first-order process and as K c increase the response become slower.
Process Control /Lec. 8 97 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
Effect of Composite Control Action
1- Effect of PI control
Combination of propertional and integral control modes lead to the follwing effects
on the response of closed-loop system.
1- The order of the response inceases ( effect of I mode).
2- The offset is eliminated (effect of I mode).
3- As Kc increses, the response becomes fater ( effect of P and I modes) and more
oscillatory to set point changes [ovesrshoot and decay ratio increase (effet of I
mode)].
Large value of Kc create a very sensitive response and may lead to instability.
4- As I decreases, for constant Kc, the reponse become faster but more oscillatory
with higher overshoot and decay ratio (effect of I mode).
2- Effect of PID control
To increase the speed of the closed loop response, increase the value of the controller
gain Kc. But increasing enough Kc in order to have acceptable speed, the response
become more oscillatory and may lead to unstability.
The introduction of the derivative mode brings a stability effect to the system. Thus
to achive
1- Acceptable response speed by selecting an appropriate value for the gain Kc.
2- While maintaining moderate overshoot and decay ratios.
Example: Regular loop with the following elements
3
GP(s) = (process)
10s 1
1
Gd(s) = (Load)
10s 1
Gm(s) = 1 (measuring device) if not given take 1
Process Control /Lec. 8 98 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
GC(s) = 2 (controller)
Gf (s) = 1.5 (valve)
Gd(s)
θd(s)
Determine the system response for a unit step in load 1
10 s 1
θSP(s) θo(s)
2 1.5 3
Set point
10 s 1
GC(s) Gf (s) GP(s)
Solution:
Gm(s)
o ( s) Gd ( s)
Regulator loop:
d ( s) 1 Gm ( s)G( s)
3 9
G(s) = GC(s) Gf (s) GP(s) = 2×1.5× =
10s 1 10 s 1
1
o ( s )
10s 1
1
=
d ( s ) 1 9 10s 10
10 s 1
1
θd(s) = 1/10
s
1
o (s) = 10 θo(t) off-set
s( s 1)
o (t) 0.1(1 - e-t )
At t = 0 , o (t) = 0
At t = , o () = 0.1
Or
1
1
o () = lim so ( s) lim s 10
s 0 s 0 s ( s 1) 10
Offset= New s.s value-Ultimate value= 0 - 0.1= -0.1
Example: the set point of the control system shown in the figure is gives a step
change of a 0.1 unit. Determine
1- The maximum value of C.
2- The offset.
3- The period of oscillation.
Process Control /Lec. 8 99 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
5 C
R K c 1 .6
( s 1)(2s 1)
C (s) GcG p
R( s ) 1 GcG p
5
1.6
C ( s) ( s 1)(2s 1) 8
2
R( s) 1 1.6 5 2s 3s 1 8
( s 1)(2s 1)
8
C( s ) 8 9 0.8889
2
R( s ) 2 s 3s 9 2 s 2 1 s 1 0.222s 2 0.333s 1
9 3
0.222 0.471
2
2 0.3333 0.3538 (Underdamped)
Ultimate Value=A*K=0.1*0.8889=0.08889
3.1418 0.3538
Overshoot exp( ) exp( ) 0.3047
1 2
1 (0.3538) 2
1) The maximum value =Ultimate value*(1+Overshoot)
= 0.08889*(1.3047)=0.1160
To find the time required to reach maximum value apply K, A , Cmax , ψ and τ
in the equation.
Y ( t ) kA[ 1 e( / )t (cos wt sin wt ]
1 2
1 2
w
2) The offset=New set point- Ultimate value
=0.1-0.088889=0.01111
2 2 0.471
3) Period of oscillation = 3.1640
1 2
1 (0.3538) 2
Example: Consider the figure below, a unit step change in load enters at either
location 1 or location 2.
What is the offset when the load enters at location 1 and when it enters at location 2
U1 G1 U2 G2
Gc
2 1
R Kc 5 C
(2s 1) (2s 1)
Process Control /Lec. 8 100 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
a-when the load enters in location 1
1
U 1( s ) , U2( s ) 0
s
G1G2
C ( s) U1 ( s)
1 GcG1G2
2 1
C( s ) 2s 1 2s 1 U ( s ) 2
U 1( s )
1 2
2 1 4 s 4 s 1 10
1 5
2s 1 2s 1
2 2 / 11
2 U 1( s ) U 1( s )
4 s 4 s 11 4 2 4
s s 1
11 11
2
K 0.1818
11
4
0.6030
11
4 4 1
2 0.3015
11 11 2
Ultimate value=A.K=1*0.1818=0.1818
Offset=0 - 0.1818= -0.1818
b-when the load enters in location 2
G2
C ( s) U 2 ( s)
1 GcG1G2
1
2s 1 2s 1
C (s) U 2 (s) 2 U 2 (s)
1
2
1
5 4 s 4 s 1 10
2s 1 2s 1
2s 1 2s 1
2 U 2 ( s)
4s 4s 11 4 2 4
s s 11
11 11
2s 1 1
C () lim 0.091
s 0 4 2 4
s s 11 11
11 11
Offset= 0 - 0.0.091= -0.091
Example: For the figure
U
1 1 C
R K c (1 s)
Is D 1s 1
Process Control /Lec. 8 101 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
For D I 1 and 1 2
a- Calculate ψ when Kc=0.5 and Kc=2
b- Determine the offset for a unit-step change in load if Kc=2
C (s) GcG p
R( s ) 1 GcG p
1 1 1 1
K c (1 D s) K c (1 s )
C (s) Is 1s 1 s 2s 1
R( s ) 1 K (1 1 1 1 1
D s) 1 K c (1 s)
c
Is 1s 1 s 2s 1
s 1 s2 1
Kc ( )
s 2 s 1 Kc (s 1 s 2 ) Kc (s 1 s 2 )
2
s 1 s2 1 2s s K c ( s 1 s 2 ) (2 K c ) s 2 (1 K c ) s K c
1 Kc ( )
s 2s 1
(s 1 s )
2
(2 K c ) 2 (1 K c )
s s 1
Kc Kc
a-1) Kc=0.5
2 Kc 2 0.5
2.2361
Kc 0.5
(1 K c ) 1 0.5 3 3
2 3 0.6708
Kc 0.5 2 2 2.2361
a-2) Kc=2
22
1.4142
2
(1 K c ) 1 2 1.5 1.5
2 1.5 0.5303
Kc 2 2 2 1.41421
Gp
B) C ( s) U ( s)
1 G pGc
1 1
1s 1 2s 1
C ( s) U (s) U (s)
1 1 1 1
1 K c (1 s) 1 K c (1 s)
I s D 1s 1 s 2s 1
s s 1
2 U ( s) 2
2s s Kc ( s 1 s ) 2
2s s 2( s 1 s ) s
2
1
2
4s 3s 1
Process Control /Lec. 8 102 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
2
3
2 3 0.75
4
1
C () lim s 2 0
s 0 4 s 3s 1
Offset=0-0=0
Example A PD controller is used in a control system having a first order process as
shown. For Servo problem
a-find expression for ψ and τ for the closed loop response.
b-if τ1=1 , τm=10 sec . Find Kc so that ψ=0.7 for two cases (1) τD=0 ,(2) τD=3 sec.
c- Calculate the offset in both cases. U Gp
Gc
1
R K c (1 D s) C
( 1s 1)
1
( m s 1)
Gm
For the closed loop T.F.
GcG p Gp
C R( s) U (s)
1 GcG pGm 1 GcG pGm
1
K c (1 D s )
1s 1
C R( s)
1 1
1 K c (1 D s )
1s 1 m s 1
Kc (1 D s)
C R( s )
1
1s 1 Kc (1 D s)
ms 1
Kc (1 D s)
C R( s )
1 m s 2 (1 m ) s 1 Kc Kc D s
ms 1
Kc (1 D s)( m s 1)
C R( s )
1 m s (1 m Kc D ) s (1 Kc )
2
K c ( 1 D s )( m s 1 )
( 1 Kc )
C R( s )
1 m s 2
( 1 m K c D )
s 1
( 1 Kc ) ( 1 Kc )
1 m
1 Kc
Process Control /Lec. 8 103 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
1 m Kc D
2
1 Kc
1 m Kc D 1 Kc
2(1 K c ) 1 m
K c D
1 m
2 (1 K c ) 1 m
1 m K c D
b) for ψ=0.7
2 (1 K c ) 1 m
1) τD=0
60 10 0 35
0.7
2 (1 K c ) 60 10 600 600 K c
600 600 Kc 50
600 600 K c 2500
K c 3.166
2) τD=3 sec
60 10 3K c 70 3K c
0.7
2 (1 K c ) 600 2 (1 K c ) 600
70 3Kc 34.292 (1 Kc )
2.04(1 0.042 Kc ) (1 Kc )
4.1616 0.355 Kc 0.0075 K c2 (1 Kc )
0.0075 K c2 0.0645 Kc 3.1616 0
K c 80.73 or K c 5.266
(c) The offset
lim f ( t ) lim sf ( s )
t s 0
1
R
s
K c (1 D s )( m s 1)
(1 K c ) 1 Kc 3.166
Ultimate value= lim s 0.76
s 0 1 m s ( 1 m K c D )
2
s 1 K c 4.166
s 1
(1 K c ) (1 K c )
Offset= 1- 0.76= 0.24
Process Control /Lec. 8 104 Written by Assis. Prof.
Fourth Class Dr. Zaidoon M. Shakor
You might also like
- First-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeDocument3 pagesFirst-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeAnand RajNo ratings yet
- 4 - Rate Laws and Stoichiometry - StuDocument62 pages4 - Rate Laws and Stoichiometry - StuTiệp MatícNo ratings yet
- Hess LawDocument16 pagesHess LawAriAnggoroNo ratings yet
- r05220802 Chemical Engineering Thermodynamics IDocument6 pagesr05220802 Chemical Engineering Thermodynamics ISRINIVASA RAO GANTANo ratings yet
- Kuhn Tucker ConditionsDocument15 pagesKuhn Tucker ConditionsBarathNo ratings yet
- Lab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveDocument10 pagesLab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveAsad saeedNo ratings yet
- ChE 122 Lecture Notes 02 II. Basic Concepts and The First Law (2.1-2.6)Document4 pagesChE 122 Lecture Notes 02 II. Basic Concepts and The First Law (2.1-2.6)MarkVergelBorjaNo ratings yet
- Test 1 CKB 30103 July 2017 Answer Scheme Rev 1Document9 pagesTest 1 CKB 30103 July 2017 Answer Scheme Rev 1nur hidayatiNo ratings yet
- 1.cre IntroDocument33 pages1.cre IntroArunPThomasNo ratings yet
- 1 - Energy and Energy BalancesDocument135 pages1 - Energy and Energy BalancesHabib Al-Aziz100% (2)
- Rate LawsDocument19 pagesRate LawsEli BerkowitzNo ratings yet
- REACTOR DESIGNDocument9 pagesREACTOR DESIGNKhalil LasferNo ratings yet
- Lecture W12 20232Document29 pagesLecture W12 2023214Adi Zawawi AzmanNo ratings yet
- Entropy ChangeDocument13 pagesEntropy ChangeAhmedAmer1No ratings yet
- Theories of Mechanical FailureDocument7 pagesTheories of Mechanical FailureRajesh KhadkaNo ratings yet
- Dynamic Behavior of First - Second Order SystemsDocument19 pagesDynamic Behavior of First - Second Order SystemsCuong TranNo ratings yet
- 5 Numerical Methods For Unconstrained Optimization PDFDocument95 pages5 Numerical Methods For Unconstrained Optimization PDFAugusto De La Cruz CamayoNo ratings yet
- Tutorial Particlesizeand Distribution 2019Document2 pagesTutorial Particlesizeand Distribution 2019GauravKinngNo ratings yet
- SoLucion ControlDocument63 pagesSoLucion Controllurafa1No ratings yet
- Reactor Design Sample ExamDocument7 pagesReactor Design Sample ExamAugustine BrockNo ratings yet
- Chapter 3: Properties of A Pure Substance: ThermodynamicsDocument62 pagesChapter 3: Properties of A Pure Substance: ThermodynamicsAnurag PanditNo ratings yet
- Energy balance on chemical reactorsDocument41 pagesEnergy balance on chemical reactorsHotib PerwiraNo ratings yet
- Chemical engineering thermodynamics tutorial questionsDocument2 pagesChemical engineering thermodynamics tutorial questionsAngelina PutriNo ratings yet
- Chapter - 2 - Introduction To ConductionDocument31 pagesChapter - 2 - Introduction To ConductionIrfan MaulanaNo ratings yet
- ThermodynamicsDocument98 pagesThermodynamicsHardeep Singh BaliNo ratings yet
- Process TroubleshootingDocument32 pagesProcess TroubleshootingantonioherediaNo ratings yet
- Chromatography explainedDocument13 pagesChromatography explainedDanish AmanNo ratings yet
- Homework 1Document9 pagesHomework 1AgithaNo ratings yet
- Final MA 240 Lab ManualDocument70 pagesFinal MA 240 Lab ManualZain Ul AbideenNo ratings yet
- First and Second Law of ThermodynamicsDocument27 pagesFirst and Second Law of ThermodynamicsAFSETCADLabNo ratings yet
- Automatic process control introDocument39 pagesAutomatic process control introaw_ae100% (4)
- Hypothetical Process Paths WITH ExplainationDocument9 pagesHypothetical Process Paths WITH ExplainationFreddie UzokweNo ratings yet
- ME6502Document171 pagesME6502ERRAMESH1989No ratings yet
- Fluidos Cap4Document50 pagesFluidos Cap4SebastianKornejoNo ratings yet
- Gas Stoich AnswersDocument2 pagesGas Stoich AnswersAki EspaldonNo ratings yet
- Process Systems Analysis and Control - S. E. LeBlanc and D. R. CoughanowrDocument63 pagesProcess Systems Analysis and Control - S. E. LeBlanc and D. R. CoughanowrLekkala RameshNo ratings yet
- 3C Chapter3 Sec.3.6 Color PDFDocument13 pages3C Chapter3 Sec.3.6 Color PDFsarmedNo ratings yet
- Separation Techniques and Factors in Chemical ProcessesDocument20 pagesSeparation Techniques and Factors in Chemical ProcessesmynurulNo ratings yet
- CHAPTER 4 Energy BalanceDocument35 pagesCHAPTER 4 Energy BalanceZafirahAhmadFauziNo ratings yet
- Lecture 19 Steady-State Error For Nonunity Feedback SystemsDocument19 pagesLecture 19 Steady-State Error For Nonunity Feedback SystemsHamza KhanNo ratings yet
- Lec 1 Properties and Handling of Particulate SolidsDocument95 pagesLec 1 Properties and Handling of Particulate SolidsAli HasSsanNo ratings yet
- 3 Materials Prperties7Document10 pages3 Materials Prperties7ArthurNo ratings yet
- Non-Interacting Process Response ExperimentsDocument6 pagesNon-Interacting Process Response ExperimentsGuruPrasadOtta100% (1)
- ChE 471 EXAM 1 2005Document2 pagesChE 471 EXAM 1 2005HungDoNo ratings yet
- Process Dynamics and Control: Chapter 5 LecturesDocument28 pagesProcess Dynamics and Control: Chapter 5 LecturesMuhaiminul IslamNo ratings yet
- Solutions For Reactor KineticsDocument2 pagesSolutions For Reactor Kineticszy_yfNo ratings yet
- Kinetics Practice ProblemsDocument9 pagesKinetics Practice ProblemsnairdanipsoNo ratings yet
- CHEG 5165 - Process Integration and Pinch AnalysisDocument52 pagesCHEG 5165 - Process Integration and Pinch AnalysisSurafelNo ratings yet
- Classifications of Philippine Disposal FacilitiesDocument25 pagesClassifications of Philippine Disposal FacilitiesJM Flores De SilvaNo ratings yet
- Microbial Growth Kinetics and BioreactorsDocument10 pagesMicrobial Growth Kinetics and BioreactorsKareem TarekNo ratings yet
- Module 2 Volumetric Properties of Pure FluidsDocument38 pagesModule 2 Volumetric Properties of Pure FluidsJatskinesisNo ratings yet
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- CompensatorDocument69 pagesCompensatorKarthika KandasamyNo ratings yet
- Feedback Control PID Control: HadiyantoDocument64 pagesFeedback Control PID Control: HadiyantoNuzul RamadhaniNo ratings yet
- Chapter 11 - Closed Loop Control SystemsDocument22 pagesChapter 11 - Closed Loop Control SystemsAdner RomeroNo ratings yet
- Control Chapter07 - GearTeamDocument71 pagesControl Chapter07 - GearTeamNabilaSalsaNo ratings yet
- 07 - Dynamics of Controlled Systems (Closed Systems)Document20 pages07 - Dynamics of Controlled Systems (Closed Systems)Ben PowersNo ratings yet
- Sweet Baby Dresses in Crochet: 4 Dresses in Sizes Newborn to 24 Months, with Matching AccessoriesFrom EverandSweet Baby Dresses in Crochet: 4 Dresses in Sizes Newborn to 24 Months, with Matching AccessoriesRating: 4 out of 5 stars4/5 (2)
- Lect 4 Non-Linear SystemsDocument10 pagesLect 4 Non-Linear SystemsZaidoon MohsinNo ratings yet
- Second order system step response analysisDocument13 pagesSecond order system step response analysisZaidoon MohsinNo ratings yet
- Lect 6 Extra Examples PDFDocument5 pagesLect 6 Extra Examples PDFZaidoon MohsinNo ratings yet
- Examples 1:: Simplify The Block Diagram Shown in Below Figures. Obtain The Transfer Function Relating C(S) and R(S)Document7 pagesExamples 1:: Simplify The Block Diagram Shown in Below Figures. Obtain The Transfer Function Relating C(S) and R(S)Zaidoon MohsinNo ratings yet
- Laplace Transforms ExplainedDocument6 pagesLaplace Transforms ExplainedZaidoon MohsinNo ratings yet
- Lect 2 Response of First Order SystemsDocument19 pagesLect 2 Response of First Order SystemsZaidoon MohsinNo ratings yet
- First-order systems response in seriesDocument8 pagesFirst-order systems response in seriesZaidoon MohsinNo ratings yet
- Process Dynamics Laplace Transforms GuideDocument63 pagesProcess Dynamics Laplace Transforms GuideZaidoon MohsinNo ratings yet
- Lect 4 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 4 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- Lect 4 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 4 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- Lect 3 Dynamic Behaviour of Feedback Controller ProcessDocument13 pagesLect 3 Dynamic Behaviour of Feedback Controller ProcessZaidoon MohsinNo ratings yet
- Lect 6 The Instrumentation and Control DiagramDocument12 pagesLect 6 The Instrumentation and Control DiagramZaidoon MohsinNo ratings yet
- Lect 5 Stability AnalysisDocument8 pagesLect 5 Stability AnalysisZaidoon MohsinNo ratings yet
- Lect 6 The Instrumentation and Control DiagramDocument12 pagesLect 6 The Instrumentation and Control DiagramZaidoon MohsinNo ratings yet
- Lect 4 Extra ExamplesDocument7 pagesLect 4 Extra ExamplesZaidoon MohsinNo ratings yet
- Lect 10 Stability AnalysisDocument7 pagesLect 10 Stability AnalysisZaidoon MohsinNo ratings yet
- Lect 10 Stability AnalysisDocument7 pagesLect 10 Stability AnalysisZaidoon MohsinNo ratings yet
- Process DynamicsDocument12 pagesProcess DynamicsZaidoon MohsinNo ratings yet
- Cover PageDocument2 pagesCover PageZaidoon MohsinNo ratings yet
- Lect 8 Interaction and Decopling of Control LoopsDocument17 pagesLect 8 Interaction and Decopling of Control LoopsZaidoon MohsinNo ratings yet
- Mathematical Modeling M.SC PDFDocument80 pagesMathematical Modeling M.SC PDFZaidoon MohsinNo ratings yet
- (Wiley Series in Chemical Engineering) Dale E Seborg - Thomas F Edgar - Duncan A Mellichamp - Process Dynamics and Control-Wiley (1989)Document733 pages(Wiley Series in Chemical Engineering) Dale E Seborg - Thomas F Edgar - Duncan A Mellichamp - Process Dynamics and Control-Wiley (1989)Zaidoon MohsinNo ratings yet
- Lect 1 Introduction To Process ControlDocument27 pagesLect 1 Introduction To Process ControlZaidoon MohsinNo ratings yet
- Lect 3 Dynamic Behaviour of Feedback Controller ProcessDocument12 pagesLect 3 Dynamic Behaviour of Feedback Controller ProcessZaidoon MohsinNo ratings yet
- 3P04 - Assign - 3 2008Document2 pages3P04 - Assign - 3 2008Zaidoon MohsinNo ratings yet
- Lect 11 Frequency Response AnalysisDocument7 pagesLect 11 Frequency Response AnalysisZaidoon MohsinNo ratings yet
- Numerical Analysis M.SC PDFDocument83 pagesNumerical Analysis M.SC PDFZaidoon Mohsin100% (3)
- Lect 1 Introduction To Process ControlDocument4 pagesLect 1 Introduction To Process ControlZaidoon MohsinNo ratings yet
- Lect 11 Frequency Response AnalysisDocument14 pagesLect 11 Frequency Response AnalysisZaidoon Mohsin100% (1)
- i-PROTECTOR SPPR Catalogue 1.0Document2 pagesi-PROTECTOR SPPR Catalogue 1.0Sureddi KumarNo ratings yet
- Rules of the Occult UndergroundDocument247 pagesRules of the Occult UndergroundIsaak HillNo ratings yet
- SOLID-LIQUID EXTRACTIONDocument4 pagesSOLID-LIQUID EXTRACTIONHarshal Agrawal100% (1)
- Organizational Change & Development - VIL2021 - 22Document3 pagesOrganizational Change & Development - VIL2021 - 22Rahul TRIPATHINo ratings yet
- PandoraFMS Alerts WhatsappDocument6 pagesPandoraFMS Alerts Whatsapppacolo89No ratings yet
- Activities For Responding To Reading in Year 2Document59 pagesActivities For Responding To Reading in Year 2lancashireliteracy100% (1)
- ISO/TC 46/SC 9/working Group 1Document4 pagesISO/TC 46/SC 9/working Group 1João Paulo CésarNo ratings yet
- Barco High Performance MonitorsDocument34 pagesBarco High Performance Monitorskishore13No ratings yet
- Harvard Referencing ManualDocument31 pagesHarvard Referencing ManualАлина ЛовицкаяNo ratings yet
- Aadhaar is proof of identity, not citizenshipDocument1 pageAadhaar is proof of identity, not citizenshipPARTAPNo ratings yet
- Grade 3 Unit 3 (English)Document1 pageGrade 3 Unit 3 (English)Basma KhedrNo ratings yet
- Independent University, Bangladesh: Term Paper (Group Assignment)Document16 pagesIndependent University, Bangladesh: Term Paper (Group Assignment)Johan Tausifur RahmanNo ratings yet
- 08 - Chapter 1 - Waveguide-Transmission Line - Microstrip LinesDocument76 pages08 - Chapter 1 - Waveguide-Transmission Line - Microstrip Linesgilberto araujoNo ratings yet
- KV Sainik Vihar Class 6 Science Holidays HomeworkDocument7 pagesKV Sainik Vihar Class 6 Science Holidays HomeworkABYAN ShaikNo ratings yet
- General Format Feasibility StudyDocument7 pagesGeneral Format Feasibility StudyRynjeff Lui-Pio100% (1)
- Gases and Gas LawDocument5 pagesGases and Gas LawMaria mercedesNo ratings yet
- In The Shadow of The CathedralDocument342 pagesIn The Shadow of The CathedralJoy MenezesNo ratings yet
- Grade 10 Illustration Q3 Week3Document6 pagesGrade 10 Illustration Q3 Week3NetsuNo ratings yet
- Mastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesDocument48 pagesMastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesSaul Saldana LoyaNo ratings yet
- Module 1 SIMPLE INTERESTDocument15 pagesModule 1 SIMPLE INTERESTElle Villanueva VlogNo ratings yet
- Thandeka, Learning To Be White: Money, Race, and God in America (New York: Continuum International Publishing Group, 1999), 169 PPDocument2 pagesThandeka, Learning To Be White: Money, Race, and God in America (New York: Continuum International Publishing Group, 1999), 169 PPFefa LinsNo ratings yet
- Planets Classification Malefic and BeneficDocument3 pagesPlanets Classification Malefic and Beneficmadhu77No ratings yet
- TAURI User ManualDocument23 pagesTAURI User ManualChris Sad LHNo ratings yet
- Mental Health Stigma and Help SeekingDocument4 pagesMental Health Stigma and Help SeekingJane Arian BerzabalNo ratings yet
- SATA Product Manual: Standard ModelsDocument32 pagesSATA Product Manual: Standard ModelsEdy AprilyantoNo ratings yet
- Strategic Marketing Plan For Red Bull - Elvis Asiedu - Academia - Edu PDFDocument23 pagesStrategic Marketing Plan For Red Bull - Elvis Asiedu - Academia - Edu PDFThomas Diwo0% (1)
- Laboratory Activity No. 01 - Properties of LiquidDocument2 pagesLaboratory Activity No. 01 - Properties of LiquidCzarina Relleve0% (1)
- Mechanics of FlightDocument1 pageMechanics of FlightMoh Flit25% (4)
- BDSM - Google SearchDocument1 pageBDSM - Google SearchporcogalliardsgfNo ratings yet
- Jurnal Metode Pelaksanaan Top Down B.ing PDFDocument7 pagesJurnal Metode Pelaksanaan Top Down B.ing PDFBayu SamiajiNo ratings yet