You might also like
- Guias PDFDocument20 pagesGuias PDFDiego Ignacio Gallardo GonzálezNo ratings yet
- Informe N°1Document14 pagesInforme N°1Sebastian Venegas San MartinNo ratings yet
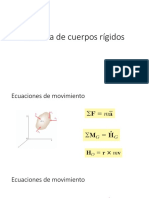
- Cinetica de Cuerpos RígidosDocument17 pagesCinetica de Cuerpos RígidosSebastian Venegas San MartinNo ratings yet
- Deposito de ComidaDocument1 pageDeposito de ComidaSebastian Venegas San MartinNo ratings yet
- Informe N°2Document15 pagesInforme N°2Sebastian Venegas San MartinNo ratings yet
- Esfuerzo de MaterialesDocument66 pagesEsfuerzo de MaterialesSebastian Venegas San MartinNo ratings yet
- Metalografia Preparacion de Probetas Al MicroscopioDocument4 pagesMetalografia Preparacion de Probetas Al Microscopiojorge_t_71No ratings yet
- 06 Microscopio MetalograficoDocument40 pages06 Microscopio Metalograficonando maowNo ratings yet
- Análisis de frecuencias de vibración inducidas por desprendimiento de vórtices en perfil aerodinámicoDocument72 pagesAnálisis de frecuencias de vibración inducidas por desprendimiento de vórtices en perfil aerodinámicoMarcos GaleanoNo ratings yet
- TAREA N2meiDocument2 pagesTAREA N2meiSebastian Venegas San MartinNo ratings yet
- Guia Labotarorio 2019 MATERIALESDocument27 pagesGuia Labotarorio 2019 MATERIALESSebastian Venegas San MartinNo ratings yet
- Guzman Munoz Andres ArianDocument117 pagesGuzman Munoz Andres ArianSebastian Venegas San MartinNo ratings yet
- Guia 2 AplicacionesDocument4 pagesGuia 2 AplicacionesSebastian Venegas San MartinNo ratings yet
- Guia 1 TermoDocument1 pageGuia 1 TermoSebastian Venegas San MartinNo ratings yet
- Análisis de frecuencias de vibración inducidas por desprendimiento de vórtices en perfil aerodinámicoDocument72 pagesAnálisis de frecuencias de vibración inducidas por desprendimiento de vórtices en perfil aerodinámicoMarcos GaleanoNo ratings yet
- Rectificado MotoresDocument13 pagesRectificado MotoreschipurraNo ratings yet
- G TE Lògica Matemàtica-2s 2018Document9 pagesG TE Lògica Matemàtica-2s 2018Jairo MoralesNo ratings yet
- Editex Nuevo 1 Bachillerato MatematicasDocument303 pagesEditex Nuevo 1 Bachillerato MatematicasMarisol García RuizNo ratings yet
- Cuadernillo Ingreso - Matematica PDFDocument122 pagesCuadernillo Ingreso - Matematica PDFAnonymous 0RY7I2WsPNo ratings yet
- Ficha Actividad #5 - 3º Matematica - EcuacionesDocument4 pagesFicha Actividad #5 - 3º Matematica - EcuacionesMichael Puma CentenoNo ratings yet
- Interpreta la dinámica poblacional a través de tasas de crecimientoDocument90 pagesInterpreta la dinámica poblacional a través de tasas de crecimientoTrinidad Lopez AriasNo ratings yet
- Aletas 1Document16 pagesAletas 1Brandon RodriguezNo ratings yet
- Tema 3Document34 pagesTema 3Felix MendozaNo ratings yet
- Ecuaciones Diferenciales Crecimiento y Decrecimiento PoblacionalDocument13 pagesEcuaciones Diferenciales Crecimiento y Decrecimiento PoblacionalTania Mabel Gutierrez MaytaNo ratings yet
- Resolución de ecuacionesDocument4 pagesResolución de ecuacionesCesarNo ratings yet
- Problemas de Fisica EstadisticaDocument34 pagesProblemas de Fisica EstadisticaCristian Midward LupacaNo ratings yet
- Exponente DDocument7 pagesExponente DLuisMiguelCabreraNo ratings yet
- Copialinaunad 140723123700 Phpapp02Document45 pagesCopialinaunad 140723123700 Phpapp02lizeth fuentesNo ratings yet
- Arreglos y Vectores ScilabDocument10 pagesArreglos y Vectores ScilabJose Enrique Mendoza RodriguezNo ratings yet
- Segundo Trabajo Analisis SismicoDocument12 pagesSegundo Trabajo Analisis SismicoHideki Oswaldo Checcnes ArpiNo ratings yet
- Guía 1. Estadística DescriptivaDocument10 pagesGuía 1. Estadística DescriptivaLenin RolandNo ratings yet
- BACH 1º Matem. I-Solucionario VicensVives-U.02Document37 pagesBACH 1º Matem. I-Solucionario VicensVives-U.02dede cheche33% (3)
- Condiciones de FronteraDocument6 pagesCondiciones de FronteraRubén De Los Santos100% (3)
- Sec 3 MZDocument63 pagesSec 3 MZAle ArguetaNo ratings yet
- Guia Virtual 2 Nucleo Logico Matematico 9Document15 pagesGuia Virtual 2 Nucleo Logico Matematico 9anguie barreto0% (1)
- Manual: Caso 3. Calculo Del Diametro de TuberiaDocument7 pagesManual: Caso 3. Calculo Del Diametro de TuberiaRubensaiD100% (1)
- IngresoCMN2023-Guia de Estudio-MatematicaDocument86 pagesIngresoCMN2023-Guia de Estudio-MatematicaJoaquin El OTKNo ratings yet
- Solución de La EcuaciónDocument5 pagesSolución de La EcuaciónJoaquin AguirreNo ratings yet
- Sistemas de Ecuaciones LinealesDocument9 pagesSistemas de Ecuaciones LinealesChagul CarmonaNo ratings yet
- Análisis Matematicos 3 Tumbaco Garcia Luiggi Alexander - 3aDocument338 pagesAnálisis Matematicos 3 Tumbaco Garcia Luiggi Alexander - 3aGabriel0% (1)
- Taller No 15Document9 pagesTaller No 15angela escobarNo ratings yet
- Actividad 6 Equilibrio QuímicoDocument3 pagesActividad 6 Equilibrio QuímicoAdrian MontemayorNo ratings yet
- Silabo Del CursoDocument6 pagesSilabo Del CursoAlexis Cueva RiosNo ratings yet
- Ecuaciones Diferenciales 001300 2130 1103Document4 pagesEcuaciones Diferenciales 001300 2130 1103gestion0950No ratings yet
- Planeación Multigrado Bloque IIIDocument612 pagesPlaneación Multigrado Bloque IIIJuan Galindo Flores100% (1)